Изобретение относится -к устрой-ствам для синхронной передачи углов поворота, состоящим из конструктивно одинаковых датчика и приемника, многофазные статоры которых читаются от одного источника переменного тока и создают вращающиеся магнитные поля, а однофазные подвижные обмотки включены последовательно в замкнутый вторичный контур.
Согласно изобретению, для передачи пространственных углов подвижные обмотки датчика и приемника выполнены в виде кольцевой рамки, помещенной в воздушном зазоре между кольцом статора и неподвижным центральным магнитопроводом. Рамка расположена в плоскости вращения потока статора и может быть наклонена к этой плоскости в любом направлении. При наклоне рамки датчика в ней возбуждается переменная Э.Д.С., амплитуда Нфаза которой зависят от угла и направления наклона. Э.д.с. возбуждает во вторичном контуре ток, вызывающий соответственный наклон рамки приемника.
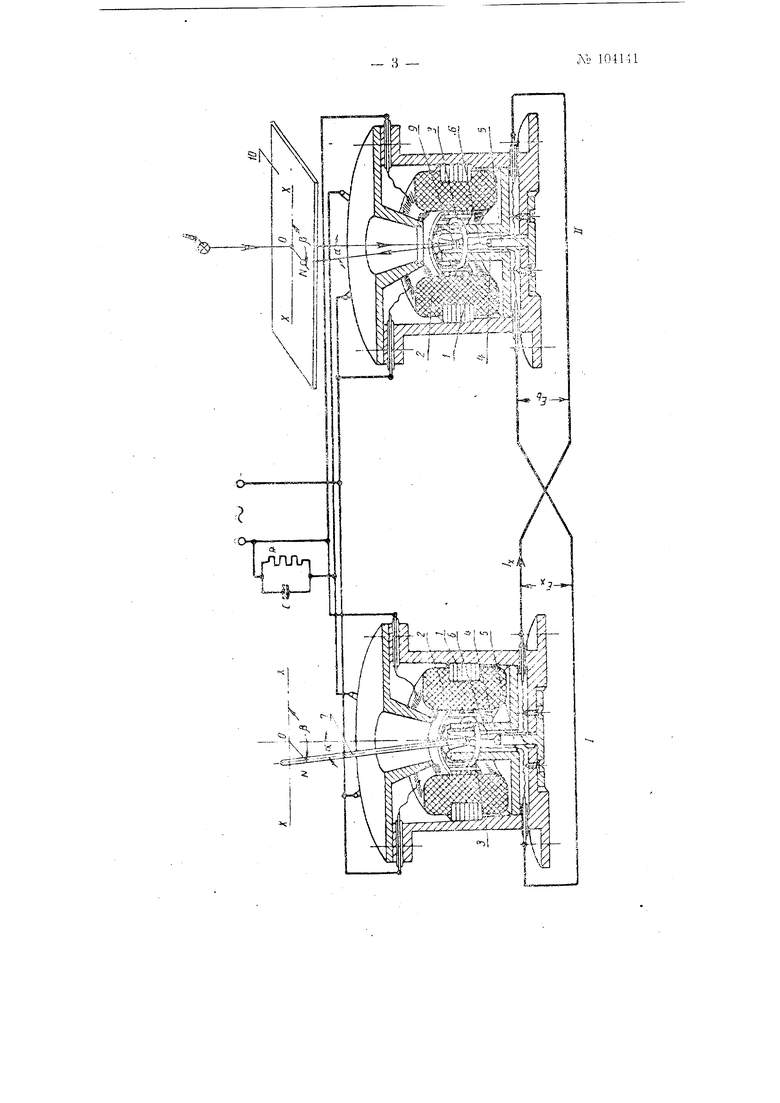
На чертеже показан схематический разрез предложенного устройства, где / - датчик пространственных углов; Я - приемник пространственных углов.
На кольцевом магнитопроводе / статора (датчика / и приемника //) располагается обмотка возбуждения , 2 создающая вращающееся магнитное поле. Указанная обмотка может быть трехфазной либо двухфазной, причем в последнем случае токп в обеих фазах, будучи равны по велячине, имеют сдвиг фаз в 90°, что достигается включением в одну из фаз обмоткн возбуждения фазосдвнгающего элемента, состоящего из емко ;ти С, шунтированной активным сопротивлением R. Подвижная обмотка как датоджа, так и приемника выполняется в виде кольцевой рамки , расположенной в зазоре между кольцевым магнитопроводом / и центральным м.агнитопроводом 4 таким образом, что вращающееся поле не имеет с рамкой потокосцепления. К неподвижной опоре 5 рамка крепится с помощью упругого стрежня 6.
Рычажком 7 поворота рамку датчика можно наклонять в любом направлении. От осветителя 8 приемника через оптическую систему (на чертеже не показана) луч света попадает на зеркальце 9, от которого отражается на прозрачный экран 10, имеюихий масщтабную сетку в виде полярной системы координат.
Рамка приемника может быть снабжена стрелочным указателем.
При наклоне )амки датчика от нулевого положения возникнет ее потокосцепление с вра1цаю1Д ;мся нолем, вследствие чего в этой рамке будет иидуктирозатьея э.д.с. .v, нод действие.. которой в контуре е1зязи и, следовательно, в рамке ирнеминка начнет иротекать ток /д- . Взаимодействуя с потоком вращающегося ноля приемника, ток /д- создаст момент, иод действием KOTOpoio рамка приемника, повернувщись на некоторый угол а, выйдет из илоскости, в которой действует врашающееея иоле. При этом появится потокосценле1И1е рамкн с вращающимся иолем. 15следетвие чего в |)амке будет индуктироваться э.д.с. ,разная э.д.с. v, по не совнадающая с ней по фазе. Ток от сулймы эти.х э.д.с. (геометрическая сумма), взанмодействзя с вращающимся магнитным иолем приемпика, вызовет перемещение рамки вокруг оси на некоторый угол 3. Перемещение прекратится, когда фаза Э.Д.С. /; совпадет с фазой э.д.с. /:д-, т. е. когда ток /д- етанет равным пулю.
Отклонение рамки приемника на угол С1 вызывает иа экране соответствующее перемещение световой точки N от начала системы координат О по радиусу, а иеремеи1енне рамки йа угол р - перемещение этой точки по окружности па угол rS. Таким образом, определенному положению ра.мки датчика соответствует оиределепное положение световой точки на экране приемника, а при движенрп ра.мки датчика световая точка на экране приемника оиисывает некоторую траекторию, соответствующую этому движению.
П р е д м е т и з о б р е т е н и я
Устройство для синхронной передачи углов поворота, состоящее из конструктивно одинаковых датчика 1 ирие., миогофазныестаторы которых питаются от одного источника перемеппого тока п создают враи1,аюн1,исся м;и п-ггиые поля, а одiiO(j)a3Hbie подвижные обмотки включены последовательно в. замкнутый вторичный контур, о т л и ч а ю щ ее с я тем, что, с целью передачи пространстве1и{ых углов, в- датчике и приемнике подвижная обмотка выполпеиа в виде кольцевой рамки, помещенной в воздущном зазоре между кольцом статора и неподвижным и,еитральныл1 магпитоироводом п расположенной в плоскости статора с возможностью наклона к этой плоскости в любом пространственном на равлепии для возбуждения при .этом в подвижиой обмотке датчика переменной Э-Д.с., по a mлитyдe и фазе зависящей от степепп и направления наклона п возбуждающей во вторичном контуре ток, вызывающий соответственный наклон подвижной обмотки приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ферродинамический нулевой индикатор к компенсаторам переменного тока | 1956 |
|
SU107371A1 |
| Компенсатор переменного тока полярно-координатного типа | 1954 |
|
SU104140A1 |
| Программное реле времени | 1939 |
|
SU58801A1 |
| Индукционный датчик перемещений | 1957 |
|
SU120561A1 |
| Бесконтактный сельсин | 1949 |
|
SU82879A1 |
| Бесконтактный сельсин | 1944 |
|
SU75518A1 |
| Устройство для электрического измерения линейных перемещений | 1940 |
|
SU62086A1 |
| Компенсационный измерительный прибор переменного тока | 1939 |
|
SU58843A1 |
| Устройство индукционного типа для передачи телеуказаний | 1940 |
|
SU59734A1 |
| Трансформатор с переменным коэффициентом связи | 1940 |
|
SU62796A1 |