Во МНОГИХ случаях бывает необходимо пе)елать на расстояние угловые неремещения, имеющие ве тичину до 90-120°. Используемые для этой цели бесконтактные сельсины с углодМ передачи в пределах ЗОО сложны.
Описываемый бесконтактный се-льсин с углом поворота 90-120° отличается от известных бесконтактных сельсинов с новоротом 360° тем, что, с нелыо создания более иростой конструкции прибора, обмотки возбуждения и синхронизании расположены в иазах одного н того же цилиндрического статора.
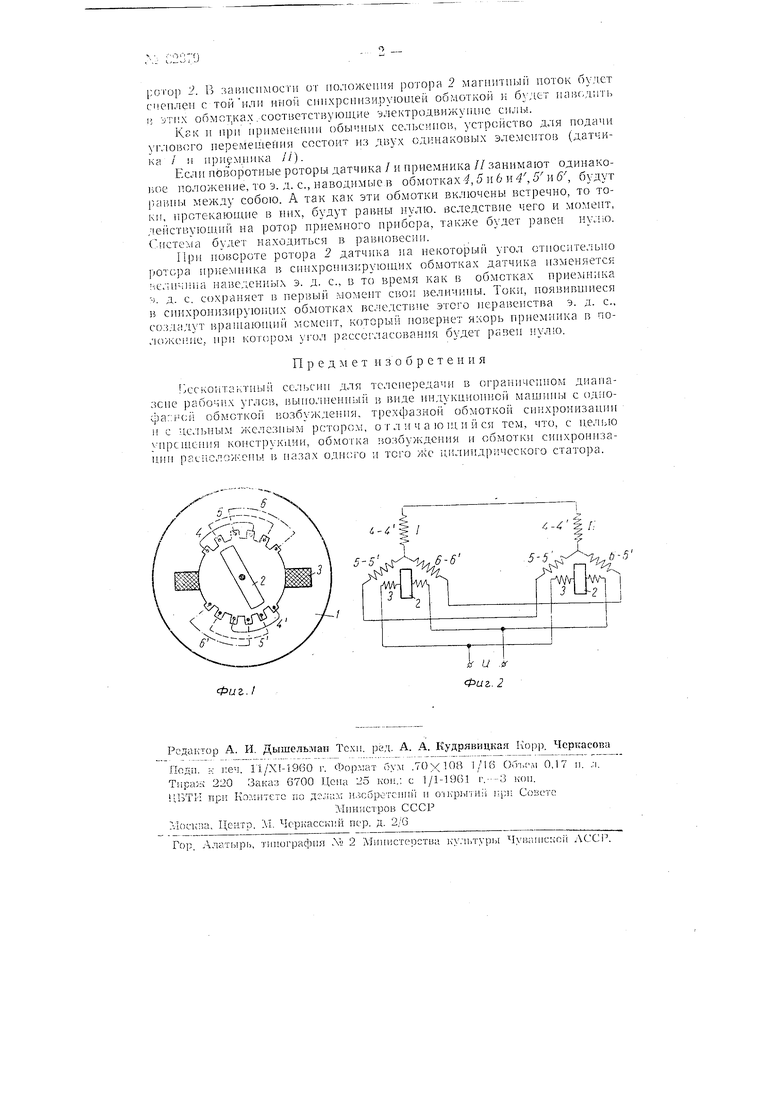
На фиг- изображена принциннальпая конструкция описываемого сельсина; на фиг. 2-электрическая схема устройства для передачи уг,1ового неремен1ення.
Онисываемый сельсии состоит нз цилиндрического магиптоировода (статора) /, поворотного ротора 2, обмотки возбуждения . и синхронизирующих обмоток 4, 4, 5, 5, 6 и 6.
Цилиндрический магнитопровод и иоворот1П)1Й ротор набираются из шихтованной стали. На внутренней новерхиости статора имсмотся паЛ1 1. Обмотка возбуждения закладывается и два паза, а синхронизирующие обмотки 4, о, 6 и 4, 5, 6 размещаются в остальных.
Применение двух ciicTc.M об моток, расноложеииых в диаметрально нротивоноложных иазах магнитонровода, HOiibiiuaeT синхрои1гзирующий момент.
Сиихроиизируюниге обмоткн каждой фазы соедиияются между собой носледо ателыю или иараллельпо, нанри.мср, обмотка 4 с обмоткой -/, обмотка 5 с обмоткой 5 н об.мотка 6 с обмоткой 6. Но.тучеи |ые таким образом три сиг-гхронизируюишс обмотки, в свою очередь, соединяются между еобой звездой или треугольником.
Нри нрисссдинеиин об.кггки возбуждеь 1я к ;сточиику пере.мениоротор 2. В ;и1иисимости от положения ротора 2 магиитпип поток оул.ет спеплеп с тойплп иной cunxponnsupyiouiek обмоткой и бу;1ет . и :УТ1 обмот.ках .соответствующие злектродвижупше силы.
Как II при принеиешп обычпых сельсипов, устройство для подачи угловг;го перемещения состоит из двух од1п- аковых элементов (датчика / 1 ирир1пика //).
Если новоротные роторы датчика / и приемника // занимают одинакоlioe положение, то э. д. с., наводимые в обмотках 4, 5 и 6 и 4, 5 и 6, будут р.авпы между собою. А так как эти обмотки включены встречно, то токп, протекающне в ппх, будут равны нулю, вследствие чего и момент, действующий па ротор приемного нрнбора, также будет равен нулю. Система будет находиться в равповесии.
При новороте ротора 2 датчика на некоторый угол относительно ротора приемника в снихропнзкрующих обмотках датчика изменяется ьелнчнна наведенных э. д. с., в то время как в обмотках приемника -). д. с. сохраняет в нераый момент свои нелпчнпы. Токи, ноявивгпиеся в сннхроннзнруюшнх обмотках вследстине этого неравенства э. д. с., создадут вран1аюн1нй момент, который но15ернет якорь прнемиика в положе111е, нрн котором угол рассогласования будет равен нулю.
Предмет изобретен н я
бесконтактный сельсин для телепередачи в огран1гчеином днаназоне рабочих углов, выполненный в виде индукнион)ой машины с одиофа::ной обмоткой возбуждення, трехфазной обмоткой сннхронизацнн и с цельным железным ротором, отличающийся тем, что, с Д1рси1сння конструкции, обмотка 50збуждснпя н обмотки синхроннзапнн расг1сл;жепы. в пазах и того /ке и,нлнидрнческого стато)а.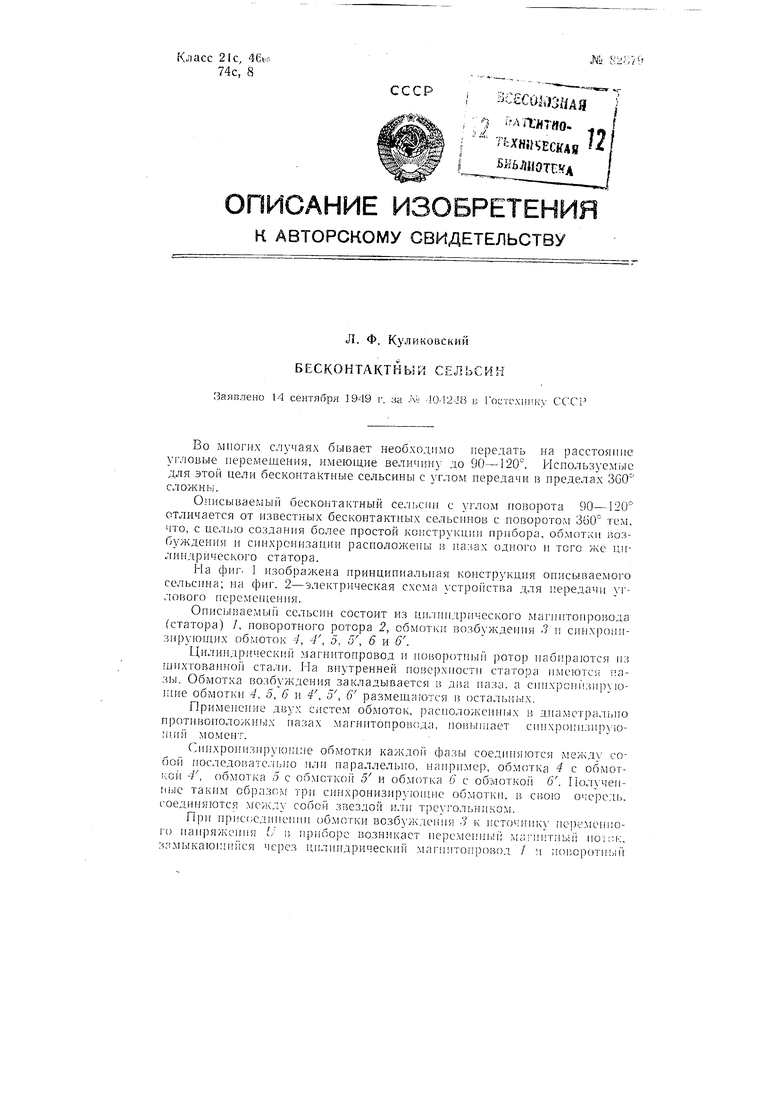
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный сельсин | 1944 |
|
SU75518A1 |
| Программное реле времени | 1939 |
|
SU58801A1 |
| Устройство для синхронной передачи углов поворота | 1955 |
|
SU104141A1 |
| Индукционный датчик угловых перемещений | 1960 |
|
SU135789A1 |
| Компенсатор переменного тока полярно-координатного типа | 1954 |
|
SU104140A1 |
| Индукционный мост | 1949 |
|
SU87426A1 |
| Устройство для измерения переменных напряжений и токов | 1945 |
|
SU67760A1 |
| Устройство индукционного типа для передачи телеуказаний | 1940 |
|
SU59734A1 |
| Компенсационный измерительный прибор переменного тока | 1939 |
|
SU58843A1 |
| Регулятор подачи бурового инструмента | 1939 |
|
SU59428A1 |
