Изобретение относится к устрой ствам автоматического контроля и регулирования, используемым при бесконтактном контроле положения и перемещения протяженных тел с магнитными метками, например при контроле .геофизических сейсмокос в процессе их постановки и выборки.
По основному авт. св. 903776 известен соленоидный бесконтактный датчик контроля положения и перемещения протяженного тела с магнитными неоднородностями, содержащий цилиндрический каркас с подключенной к генератору синусоидальных колебаний обмоткой возбуждения, две последовательно .включенные сигнальные обмотки, расположенные по обе стороны от обмотки возбуждения, выходы которых соединены через последовательно включенные первый и второй балансирующие потенциометры, ферромагнитный экран, две RC-цепочки, компенсационную обмотку, расположенную совместно с возбуждающей, и два узкополосных фильтра, входы которых подклчены к подвижным контактам балансирующих потенциометров, при этом один вывод компенсационной обмотки соединен с общей шиной, а второй с о.бщей точкой балансирующих потенциометров, RC-цепочки включены между выводами сигнальных обмоток и входами узкополосных фильтров,, а ферромагнитный экран выполнен в виде трех раздельных тороидальных корпусов, охватывающих соответствующие обмотки f 1 .
Однако известчый датчик обладает недостаточной помехоустойчивостью, прохождение него электропроводящих деталей (тел), особенно цилиндрических, вызывает на его выходах появление подобных информационным сигналам помех, которые вызывают неустранимые сбоив работе всей системы контроля в целом, что недопустимо. Физическая природа возникновения -помех обусловлена уменьшением коэффициента связи между возбуждающей и .сигнальной обмотками вследствие возникновения наведенных токов в электропроводящих деталях, проходящих через датчик.
Цель изобретения - повьашение помехоустойчивости датчика.
Указанная цель достигается тем, соленоидный бесконтеистный датчик контроля положения и перемещени протяженного тела введены два регулруемых фазовращателя и два фазовых детектора, причем выходы первого и второго узкополосных фильтров соединены соответственно с сигнальными входс1ми первого и второго фазовых детекторов, опорные входы которых через соответствующие первый и второй регулируемые фазовращатели поД
ключены к обшей точке балансирующих потенциометров.
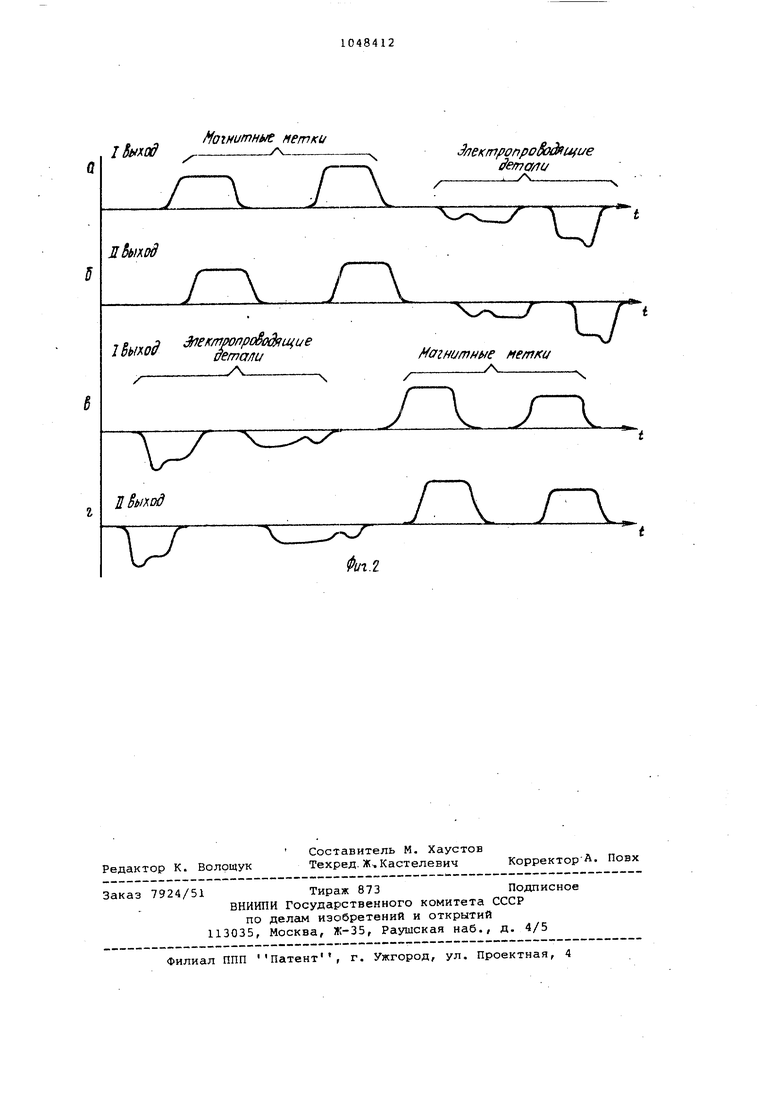
На фиг. Г приведена структурная -схема устройства; на фиг. 2 - временные диаграммы, поясняющие его работу
Датчик состоит из цилиндрического каркаса 1 с возбуждающей обмоткой 2 подключенной к генератору 3 синусоидальных колебаний, двух сигнальных обмоток 4 и 5, включенных последова;тельно, выводы которых подсоединены непосредственно к крайним выводам последовательно включенных балансирующих потенциометров 6 и 7, а через RC-цепочки 8 и 9 к их центральным контактам и входам узкополосных фильтров 10 и 11, двух Фазовых детекторов 12 и 13, сигнальные входы которых порознь присоединены к выходам узкополрсных фильтров, а опорные - через регулируемые фазовращатели 14 и 15 к общей точке балансирующих потенциометров и к одному из выводов компенсационной обмотки 16, намотанной поверх возбуждающей, второй вывод которой соединен с общей шиной узкополосных фильтров, и трех ферромагнитных тороидальных корпусов 17-19, охватывающих соответствующие обмотки.
Работает соленоидный бесконтактный датчик контроля положения и перемещения -протяженного тела с магнитными неоднородностями следующим образом.
Электрический сигнал генератора 3 синусоидальных колебаний подается на возбуждающую обмотку 2, вокруг которой возникает переменное электромагнитное поле, приводящее к возникновению ЭДС в компенсационной 16 и в сигнальных 4 и 5 обмотках. При отсутствии внутри датчика магнитного либо электропроводящего тела поле сосредоточено во внутреннем пространстве тороидальных корпусов 17-19 ферромагнитного экрана, поэтому коэффициенты связи между возбуждающей и сигнальнш и обмотками малы. Малы ивеличины ЭДС сигнальных обмоток.
В присутствии магнитной либо электропроводящей неоднородности конфигурация электромагнитного поля резко меняется. Коэффициенты связи резко возрастают при магнитном и уменьшаются при электропроводящем характере неоднородности. Пропорционально изменениям коэффициентов связи происходит и изменение ЭДС сигнальных обмоток. В то же время величина ЭДС компенсационной обмотки при введении неоднородности,практически остается неизменной (за счет расположения ее и возбуждающей в едином тороидальном корпусе 18) и равной ЭДС сигнальных обмоток при отсутствии неоднородности внутри датчика. Поскольку компенсационная обмотка и каждая из сигнальных включены в смежные плечи мостовых схем (другие плечи мостовых схем - это части балансирующих потенциометров 6 и 7 цепочки 8 и 9 соответственно), а уз кополосные фильтры 10 и 11 настроены на частоту основной гармоники и включены в диагонали этих мостовых схем, то напряжение на сигнальных выходах фазовых детекторов 12 и 13 минимально и равно остаточному. Минимизация остаточного напряжения до стигается компенсацией фазовых разбросов путем регулировки постоянных времени Й5-цепочек. Минимально в эт момент и напряжение на обоих выходах детекторов датчика, так как оно пропорционально произведений амплитуд и синусу разности фаз входных сигналов. При введении в датчик неоднородности баланс мостовых схем н рушается и на выходах датчика появляются сигналы, причем полярность сигналов в силу противофазнрго отли чия напряжения в диагоналях обеих мостовых схем при введении неоднородностей магнитного и электропрово дящего типов получается различной. В динамическом режиме датчик работает следующим образом. Когда контролируемое тело движет ся слева направо, то с вхождением магнитной метки сначала нарастает сигнал на 1-м выходе датчика (фиг. и 2 ). Нарастание идет до тех пор, пока правая грань метки не достигнет правой стороны ферромагнитного тороидального корпуса 18. Далее иде формирование вершины импульса- до тех пор, пока левая грань метки не достигнет левой стороны ферромагнитного тороидального копуса 17. После этого амплитуда выходного сигнала уменьшается и, когда левая грань метки выходит за пределы зазора ферромагнитного тороидального корпуса 17, становится равной нулю. Аналогич ным образом происходит формирование импульса на 2-м выходе датчика(фиг. и 2 ), причем его передний фронт соответствует вхождению правой грани магнитной метки в ферромагнитный тороидальный корпус 19, а задний моменту выхода левой грани метки из ферромагнитного тороидального корпуса 18. Поскольку расстояние между ферромагнитными тороидальными корпусами с сигнальными обмотками выбирается не более длины магнитной метки, то импульс на 2-м выходе возникает в момент формирования вершины импульса на 1-м выходе датчика, а э-аканчивает-. ся в тот момент .времени, когда им- . пульс на 1-м выходе уже отсутствует. Когда контролируемое тело движется справа налево, то в результате прохождения каждой из магнитных меток через датчик также возникает по одному импульсу на обоих выходах. Однако в этом случае первыми появляются импульсы на 2-м выходе датчика (фиг. 2 в , г) , а затем с запаздыванием на время прохождения левой грани метки расстояния -между тороидальными корпусами 18 и 17 импульсы на 1-м выходе датчика. И в этом случае, пока метка находится внутри всех трех корпусов 17-19, идет формирование вершин импульсов. Процессы, происходящие при прохождении через датчик электропроводящих деталей, аналогичны описанным 1лишь с тем отличием, что выходные импульсы в силу уменьшения коэффициентов связи между обмотками имеют отрицательную полярность. Для максимизации амплитуды импульсов генерируемых датчиков при прохождении магнитных меток- (соответственно минимизации с1мплйтуд импульсов генерируемых при прохождении электропроводящих деталей) служат регулируемые фазовращатели 14 и 15, обеспечивающие фазировку сигналов на выходах фазовых детекторов. При работе предложенного устройства обеспечивается на выходах устройства разнополярность информационных сигналов и помех, возникающих при прохождении через датчик электропроводящих деталей, и тем самым повышение ег.о помехоустойчивости, а следовательно, надежности работы всей системы контроля положения и перемещения протяженных тел в целом.
Магнитна метки 15ыш ,/Ч™
гл Г
1Ьы)(од
neKrnponpoSo Ufue ета/1(
W
7 eKfnponpo6ffdlRu4ue 1 ошоедетали
vV
W
f azHumHiffe метки
А
N,
Л
W
Фи1.г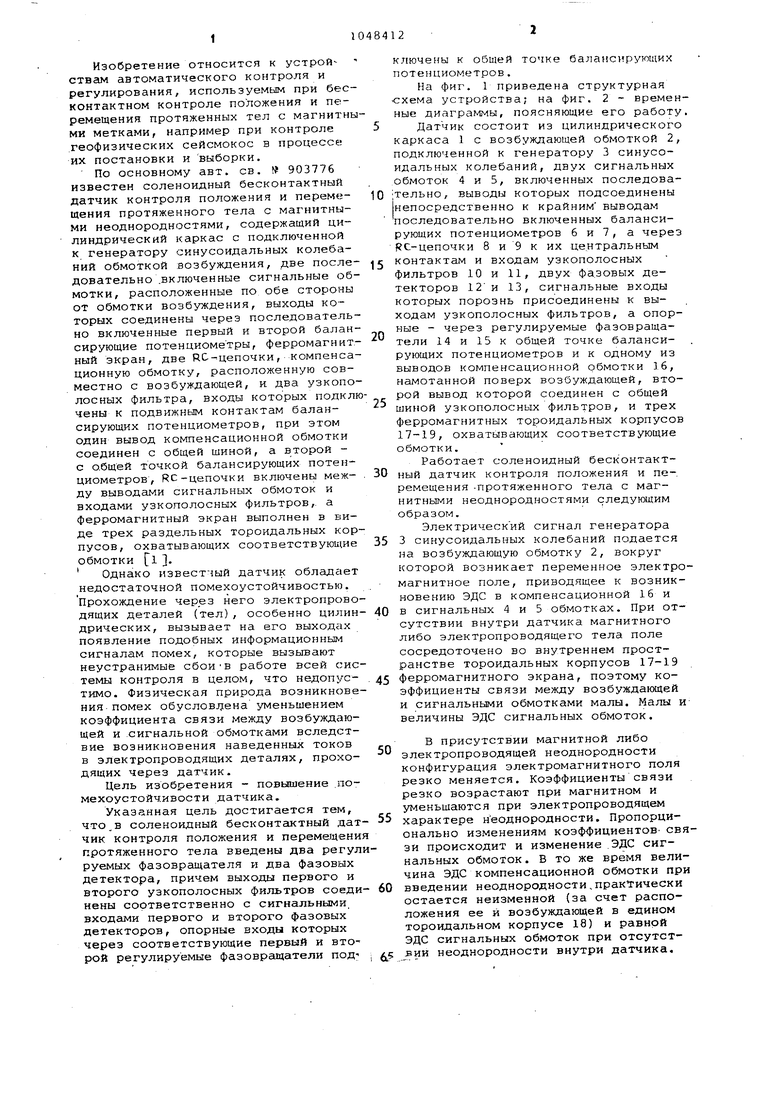

| название | год | авторы | номер документа |
|---|---|---|---|
| Соленоидный бесконтактный датчик контроля положения и перемещения протяженного тела с магнитными неоднородностями | 1980 |
|
SU903776A1 |
| ФЕРРОЗОНДОВЫЙ ПОЛЮСОИСКАТЕЛЬ | 1996 |
|
RU2123303C1 |
| ПОЛЮСОИСКАТЕЛЬ | 1996 |
|
RU2123302C1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Устройство для бесконтактного измерения расхода (скорости) течения электропроводящей жидкости | 1977 |
|
SU901825A1 |
| Устройство для диагностики состояния процесса резания | 1983 |
|
SU1122476A1 |
| Электромагнитный датчик для контроля металлических изделий | 1982 |
|
SU1068190A1 |
| Поисковый градиентометр | 1975 |
|
SU653589A1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП | 1995 |
|
RU2085932C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА И ПЛОТНОСТИ ЖИДКОСТИ | 1990 |
|
SU1805737A1 |
СОЛЕНОИДНЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК КОНТРОЛЯ ПОЛОЖЕНИЯ И ПЕРЕМЕЩЕНИЯ ПРОТЯЖЕННОГО ТЕЛА С МАГНИТНЫМИ НЕОДНОРОДНОСТЯМИ по авт. св. 9 903776, отличающийся тем, что, с целью повышения помехоустойчивости датчика, в него введены два регулируемых фазовращателя и два фазовых детектора, причем выходы первого и второго уэкополосных фильтров соединены соответственно с сигнальными входами первого и второго фазовых детекторов, опорные вхйды которых через соответствующие первый и второй регулируемые фазовращатели подключены к общей точке балансирующих потенциометров. (Л 4 00 4 to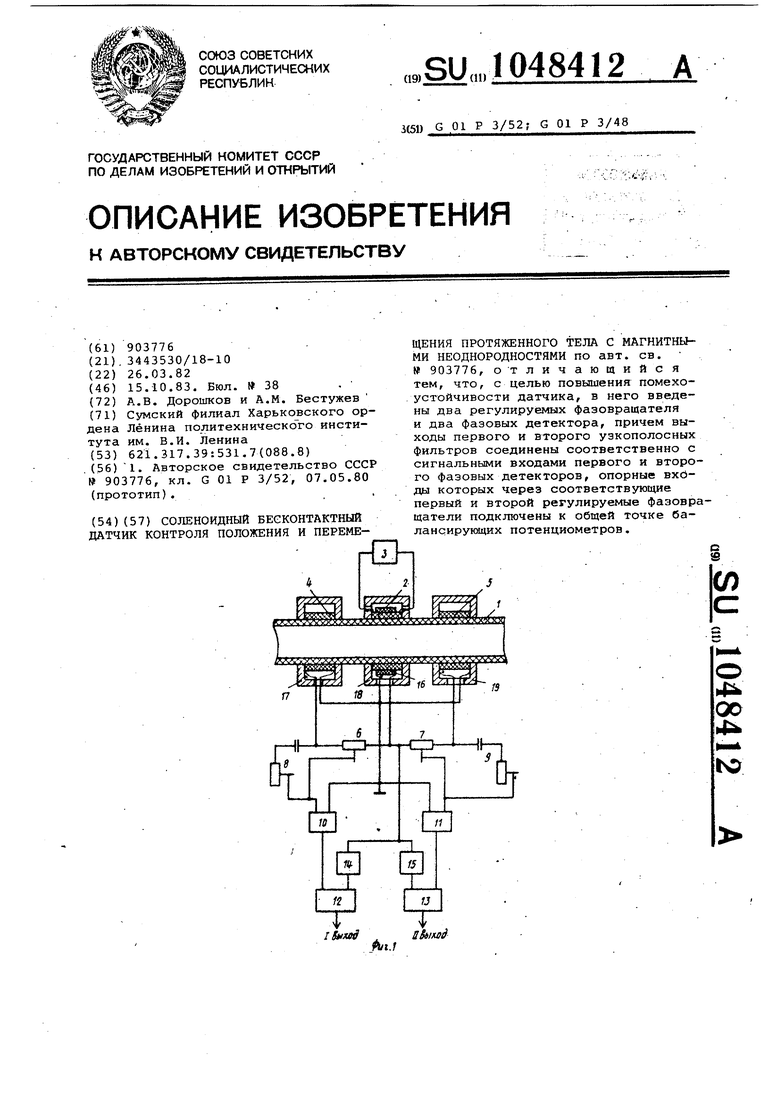
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Соленоидный бесконтактный датчик контроля положения и перемещения протяженного тела с магнитными неоднородностями | 1980 |
|
SU903776A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
