1 2. Способ по п. 1, отличающ и и с я тем, что, с целью повышения точности калибровки путем уменьшения погрешности от неоднородности циаграм мы направленности преобразователей в горизонтальной плоскости, снимают обобщенную циаграм1уСу направленности зонда в горизонтальной плоскости путем 38 синфазного вращения контрольных преобразователей, размещенных в одной осевой, вертикальной плоскости, и для калибровочных измерений размешают контрольные ;. преобразователи в осевой вертикальной плоскости, проходящей через максимум обобщенной диаграммы направленности зонда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поверочно-калибровочное устройство для аппаратуры акустического каротажа | 1980 |
|
SU890318A1 |
| Калибровочное устройство аппаратуры акустического каротажа | 1978 |
|
SU785828A1 |
| Способ калибровки аппаратуры акусти-чЕСКОгО КАРОТАжА | 1979 |
|
SU824097A1 |
| Устройство для калибровки приборов акустического каротажа | 1980 |
|
SU928287A1 |
| Калибровочное устройство аппаратуры акустического каротажа | 1976 |
|
SU693304A1 |
| Преобразователь для акустического каротажа | 1978 |
|
SU744407A1 |
| СПОСОБ ДИСТАНЦИОННОГО ТЕСТИРОВАНИЯ ПРИБОРОВ АКУСТИЧЕСКОГО КАРОТАЖА В ПОЛЕВЫХ УСЛОВИЯХ | 2013 |
|
RU2521144C1 |
| Поверочно-калибровочное устройство аппаратуры акустического каротажа | 1980 |
|
SU894646A1 |
| Зонд скважинного прибора волнового акустического каротажа | 1990 |
|
SU1749870A1 |
| Способ поверки аппаратуры акустического каротажа | 1981 |
|
SU1053036A1 |
1. СПОСОБ КАЛИБРОВКИ АППАРАТУРЫ АКУСТИЧЕСКОГО КАРОТАЖА, основанный на измерении амплии тудных характеристик акустического сиг нала, задаваемого с помсяцью внешних контрольных преобразователей, контактирующих с преобразователями калибруемой аппаратуры через слой жидкрсти, сравнении измеренных и даваемых ха- . рактеристик и оценке по результатам этого сравнения погрешностей аппаратуры, отличающийся тем, что, с целью повьшения точности кешибровки путем исключения погрешности от неоднородноста полей излучения и приёма, размешают каждый из контрольных преобразователей на расстоянии равном радвусу скважины от вертикальной оси зонда калибруемой аппаратуры в плоскости, нормальной к этой оси и смещённсхй к центру зонда от плоскости максимумов i диаграммы направленности в вертикал . ной плоскости каждого преобразователя (Л CZ на расстояние равное произведению тангенса критического угла на радиус скважины.
Изобретение относится к промыслово геофизическим исследованиям и может быть использовано при оценке качества разных типов аппаратуры акустического каротажа и соответствид ее решаемым задачам.
Известен способ поверки и калибров- ки акустическах параметров с помощью . электронных имитаторов среды с регулируемой величиной затухания акустического сигнала и времени его прихода, реал зуемый устройством Щ . Способ основан на использовании системы контрольных преобразователей, принимающих акустический сигнал от излучателя проверяемого скважинного прибора и, после задержки его во в{зомени и ослабления, передающих его на приемник скважинного прибора. Способ, основанный на использовании такого устройства, позволяет получить детальную характеристику электронно-акустического тракта проверяемой аппаратуры для сигнала произвольной формы и величины.
Недостатком способа с использованием электронного имитатора среды являет ся непредусмотренность калибровки по параметру, наиболее полно определяющему условия образования волн в скажине, в частности, по составляющей излучения под критическим углом.
Наиболее близким к предлагаемому по технической су щи ости является способ калибровки аппаратуры акустического каротажа, основанный на измерении амплитудных характеристик акустического сигнала, задаваемого с помощью внешних KOHIW рольных преобразователей, контактиду)щих с преобразователями калибруемсй аппаратуры через слой жидкости, сравнении измеренных и задаваемых харктериотик и оценке по результатам этого сравнения погрешностей аппаратурзь В этом способе точность калибровки повышается путем приблиЯ{ения к реальным условиям в скважине 2J .
.Недоста1:ком способа является невоз- можность измерений в горизонтальной плоскости характеристики направленности в условиях, подобных условиям в скважине и, следовательно, невозможность учесть при калибровочньвс измерениях пог.решность, возникшую из-за различия условий калибровки и рабочих, условий измерений. Погрешность калибровки по задаваемому времени складывается - из погрешности электронного имитатора и norpemHocTH прохождения сигнала в среде. ота погрешность в свою очереаь обусловлена различием времени прохождения акустического сигнала в среде, в которой находятся контрольные преобразователи, и реальной скважинной среде (контрольным преобразователем принимается сиг нал по, кратчайшему пути при первом вступлении, а в скважина - под критическим углом). Кроме того, за счет неицентичности амплитудных составляющих акустического сигнала при калибровке и в скважине невозможно учесть ошибки калибровки по затуханию (контрольные преобразователи передают боковые составляющие ь излучаемых и принимаемых колебаний). Невозможно также определить и неравномерность диаграмм направлен.Hocrat, являющихся оцной из важнейших характеристик преобразователей, опредвл:яющих погрешность калибровочных измерений.
Цель изобретения - повьш1енив то1чно сти калибровки путем исклкяения пог решности от неоднородности полей излучения и приема.
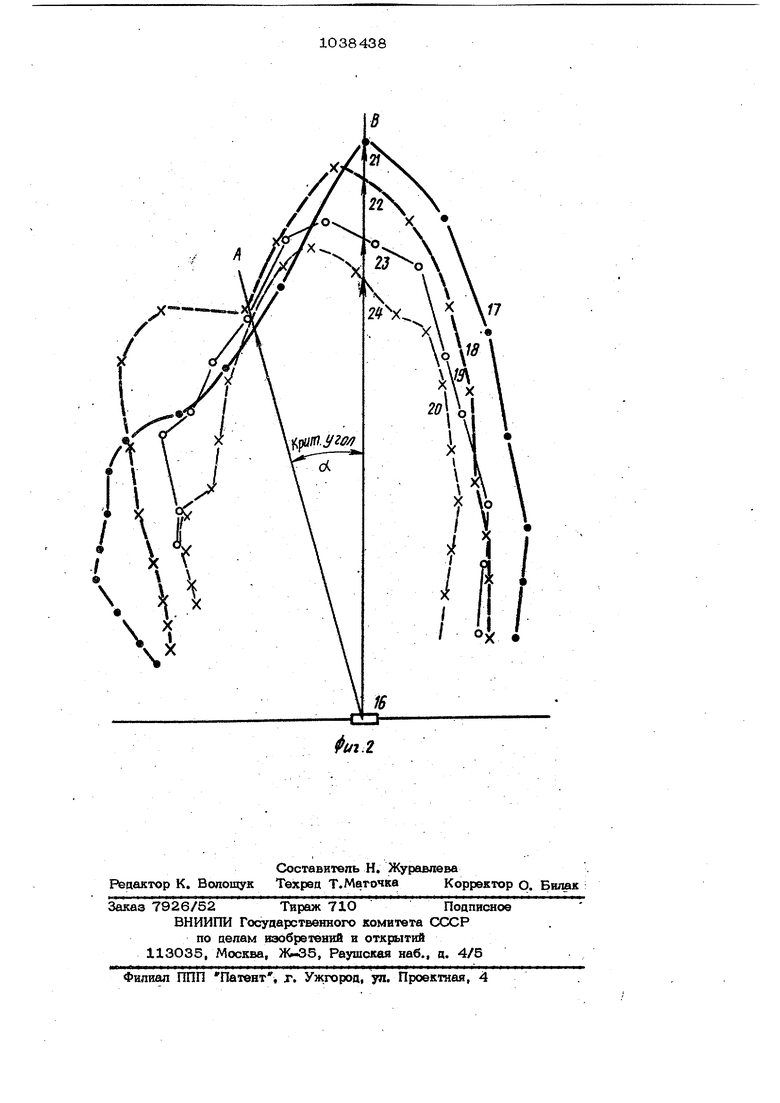
Поставленная цепь достигается тем, что согласно способу калибровки аппа- ратуры акустического каротажа, основан ному на. измерении амплитудных харак- теристик акустического сигнала, зацаваемого с помощью внешних контрольных преобразователей, контактируняцих с преобразователями калибруемой аппаратуры через слой- жидкости, сравнении измеренных и задаваемых характеристик и оценке по результатам этого сравнения погрешностей аппаратуры, разме- 1цают каждый из контрольных преобразо;вателей на расстоянии равном радиусу скважины от вертикальной оси зонда калибруемой аппаратуры в плоскости, нормальной к этой оси и смещенной к центру зонда от плоскости максимумов диаграммы направленности в вертикальной плоскости каждого преобразователя на расстояние равное произведению тангенса критического угла на радиус сква- Кроме того, снимают обобщенную диаграмму направленности зонда в горизонтальной плоскости путем синфазного вращения контрольных .преобразователей, размешенных в одной осевой вертикаль ной плоскости, и для калибровочных измерений размещают контрольные прео&разователи в осевой вертикальной плоско сти, проходящей через максимум обобщен ной диаграммы направленности зонда. На фиг. 1 показана схема реализации способа; на фиг. 2 - диаграммы направленности излучателя, снятые в вертикаль ной плоскости. На схеме (фиг. 1) показаны преобразователи 1 и 2 (излучатель и приемник скважинного зонда калибруемой аппаратуры), внещние контрольные преобразователи 3 и 4, проекция 5 образующей поверхности скважины рзациусом R , ин- тЬрвалы 6 и 7 осевого перемещения контрольных преобразователей, векторы 8 и 9 соответственно максимума цйЗ граммы направленности в вертикальной, осевой плоскости и ух тавляющей диаграммы направленности, расположенной под критическим углом Ы. , плоскости 10 и 11, в которьсх расположены контрольные преобразователи 3 и 4, диаграммы 12 и 13 направленности в вертикальной плоскости соответственно излучателя и приемника, блок 14 измерения формирования задержек и ослабления сиг налов, наземная панель 15. На фиг. 2 показаны излучатель 16 и его диаграммы направленности 17 - 20 . в вертикальной плоскости на расстоянии 4384 ОТ него соответственно 7О, 100, 130 и 160 мм. А и В -направления, по которым снимаются составляющие излучения по.данному способу (под критическим уп лом) и по известнь1М способам (по нэрн мальной боковой составляющей - регистри руемые составляющие на указанных расстояниях показаны стрелками позициями 21-24,). Способ реализуется следующим образом. Скважинный зонд калибруемой аппаратуры помещают в бассейн, заполненный жидкостью, через которую осуществляют передачу акустического сигнала от излучателей калибруемого прибора к контрольным преобразователям. Сигнал с одного из преобразователей, например преобразователя 1 (излучателя), принимают контрольным преобразователем 3, размещенным на расстоянии равном радиусу скважины, производят иа мерения в блоке 14 при перемещении , преобразователя 3 по интервалу 6. Затем находяФ максимум диаграммы направленности преобразователя 1 в вертикальной плоскости, проекцию этого максимума на плоскость преобразователя 1, проведя из этой точки вектор 9, направленный под 1 критическим углом oi. находят точку пересечения BeKTojaa 9 с , боковой поверхностью скважины, В эту точку устанавливают контрольный преобразователь 3, вращая зонд вокруг верт кальной оси, снимают диаграмму направ- ленности излучения в горизонтальной плоскости и определяют .ее неравноме{ ность. Такие же операции осуществляют для преобразователя 2 (приемника) с контрольным преобразователем 4, диаграмму направленности приема в горизонтальной плоскости получают путем измерения амплитуд наземной- панелью 15, Далее устанавливают контрольные преобразователи 3 и 4 в плоскостях, в коорых снимались диаграммы направлености в горизонтальной плоскости, и опеделяют необходимые калибровочные хаактеристики электронно-акустического ракта, например путем задания н измеения калиброванных , величин с помоью блока 14 и наземной панели 15, олученные таким образом калибровочные арактеристики в точности идентичны рабочим условиям измерений и, следоваельно, погрещность оценки ощибки изерения (по нелинейности калибровочНЫ.Х характеристик), обусловленная неицентичностью вертикальных auarpaMN направленности по составляющим излучения цля различных критических углов (фиг. 2), будет исключена. При этом для каждой срецы, гце преаназначается проводить скважинные измерения, должны быть проведены калибровочные измерения (под соответствующим крити- ческим углом). В случае же обычных калибровочных измерений определенная П 1салибровочным характеристикам ошибка измерений соответствует идеализированны условиям (для норк альных составляющих излучения), не включает погрешности от влияния преобразователей и, следователь но, меньще фактической. Следующая операция, направленная на приближение определяемой ошибки измерений к фактической, в эксплуатационных условиях должна учитывать возможное влияние )расценбровки прибора. Для этого путем синфазного вращения KOHTW рольных преобразователей Зи4иизмерения наземной панелью 15 амплитудных параметров определяют (например, через угловое расстояние 5-10 ) обобщенную диаграмму направленности данного зонда. Поскольку возможны различные соьчетания ориентировки в скважине осей диаграмм направленности, то данная обобщенная диаграмма дает возможность судить -о их реальном совместном влиянии на регистрируемую волновую картину и, следовательно, на возможную величину ощибки, связанной с расцент ровкой прибора в скважине. Наименьщая ощибка измерения амплитуд при н,али чин определенной расцентровки будет, ес ли обобщенная диаграмма не отличается от окружности. При отличии ее от круговой волновая картина при расцент. ровке (особенно при изменении формы сечения скважины) изменяется наиболее незакономерно. Несколько меньше укапанные влияния в случае совпааенця в осевой плоскости радиальных перемещен амплитуд от приемника и излучателя на обобщенной диаграмме (имеющей в этом случае-форму эллипса). Способ реализован для аппаратуры АКЦ-36 путем измерений в бассейне,, стальной колонне, а также в воздухе с применением специальных (заполненных нетекучим материалом) внешних контрольных преобразователей. Предложенный способ по сравнению с базовым объектом (поверочная установ- ка УП-1 ТУ-40-80) позволит более точно определить ошибки измерения времени и амплитуд и, соответственно, повысить достоверность скважинных измерений (удается уменьшить доверительный интервал за счет уточнения ошибок калибровки). Кроме того, появляется возмож- , ность определения неравномерности диаграммы направленности преобразователей в горизонтальной плоскости и возможность определения обобщенной диаграммы направленности зонда, что уменьшает влияние расцентровки. Таким образом, положительный эффект способа заключается в возможности оперативного получения детальных диаграмм направленности преобразователей, а также в возможности оценки качества преобразователелей по конкретному волнообразу « щему параметру, например составляющей излучения под определенным критическим углом для данной среды. Это позволяет более точно .определить погрешность измерений, оценить пригодность приборов для различных геолого-технических условий и исключить дополнительные неэ фективные замеры на скважинах. Кроме того, получаемая обобщенная диаграмма ; направленности зонда дает представление , о сбалансированности прибора в отношении неискаженности волновой картины и допускает прогноз величины нестабильности регистрируемых параметров,, например, амплитуды, обзгсловленной |5асценть. ровкой прибора и сложной конфигурацией стенки скважины, что также позволяет уменыиить число неэффективных замерор.
17
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 2944621, кп, 181-.О5, опублих | |||
| Водоотводчик | 1925 |
|
SU1962A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
