х,
I /
HZ
8
СП
О)
tt
ел
п
2о Устройство для реализации способа геоэлектроразведки по ri, 1, содержащее две ортогональные приемные рамки, размещенные на горизонтальной оси вращения, ортогональной этим рамк&м,и подключенные к входам соответст йующих усилителей, отсчетное устройство, закрепленное на оси рамок, мостовую измерительную схему и индикатор, включенный в диагональ мостовой измерительной схемы, о т л и ч адю щ е е с я тем, что в него введены дополнительно два детектора с раторами, причем входы детекторов соединены с выходами соответствующих усилителей, выходы детекторов соединены с входами интеграторов, два выхода интеграторов - с различными вершинами мостовой схемы, а два других выхода соединены вместе а образуют одну из точек диагонали моста, к которой подключен индикатор.



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1996 |
|
RU2107932C1 |
| Способ измерения направления большойпОлуОСи эллипСА пОляРизАции МАгНиТНОйНАпРяжЕННОСТи элЕКТРОМАгНиТНОгО пОляи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU805231A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕМЕНТОВ ПРОЕКЦИИ | 1965 |
|
SU176334A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1972 |
|
SU325578A1 |
| Устройство для измерения параметров электромагнитного поля | 1980 |
|
SU918917A1 |
| ИНДУКТИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВАРИАЦИЙ ЭЛЕКТРОСОПРОТИВЛЕНИЯ ГЕОЛОГИЧЕСКОЙ СРЕДЫ | 1995 |
|
RU2093862C1 |
| Устройство для геоэлектроразведки | 1980 |
|
SU930192A1 |
| Устройство для трассирования заглубленных трубопроводов | 1989 |
|
SU1746227A1 |
| Измеритель проводимости земной поверхности | 2024 |
|
RU2820896C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ЧАСТОТНО-ВРЕМЕННОЙ ГЕОЭЛЕКТРОРАЗВЕДКИ (FTEM-3D) | 2010 |
|
RU2446417C2 |
1. Способ геоэлектроразведки, б котором измеряют параметры естественного электромагнитного поля Земли с помощью двух ортогональных приемных рамок путем отсчета на каждой исследуемой точке угла наклона большой оси эллипса поляризации электромагнитного поля к горизонту по шкале, связанной с рамками, отличающийся тем, что, с целью увеличения точности измерения и со«;ращения времени измерения, геометрические оси приемных рамок устанав-ливают таким образом, что в них измеряют противофазные сигналы, которые интегрируют, затем рамки поворачиваю т до тех пор, пока амплитуды сигналов на интеграторах не станут равными, 9 геометрические оси рамок установятся под углом 5 к полному вектору электромагнитного поля и по углу поворота рамок судят о наклоне большой оси эллипса поляризации электромагнитного поля Земли к горизонту.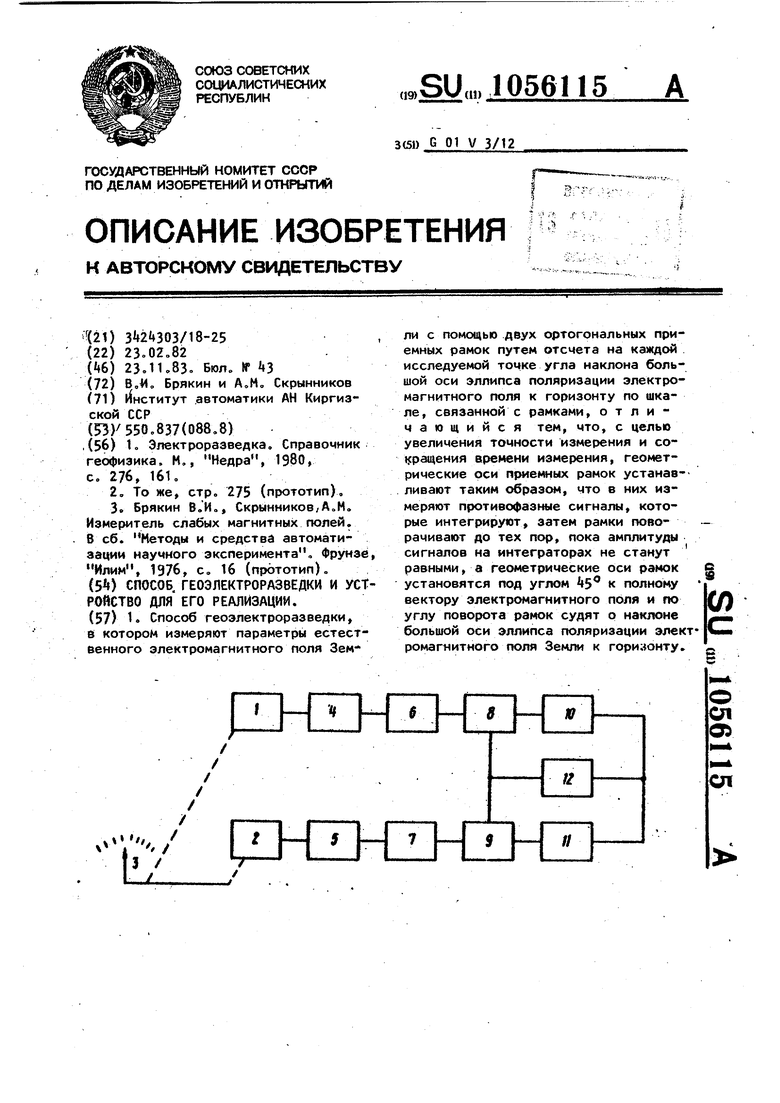
1
Изобретение относится к электроразведке и может быть использовано для дифференциации пород по электрическому сопротивлениюо
Известен способ геоэлектроразведки, в котором измеряют угол наклона большой оси эллипса поляризации естественного электромагнитного поля к горизонту ei путем сочетания методов компенсации и наклона., при этом используются две взаимно перпендикулярные приемные рамки, из которых измеряет горизонтальную, а вторая вертикальную компоненты электромагнитного полЯй Ось второй рэмки отклоняется от вертикали в плоскости, перпендикулярной к, азимуту ориентировки первой рамки, и компенсация сигнала в ней осуществляется частично за счет подбора угла отклонения, а частично за счет сигнала, полученного в первой рамке. Угол.оСв данном случае определяется как функция двух величин: сигнала, наведенного во второй приемной рамке, и угла отклонеимя ее от вертикали tl3«
Недостатком такого способа является необходимость измерения абсолютных значений составляющих флуктуационного естественного электромагнитного поля., что требует дополнительных устройств калибровки как датчиков, та и измерительных тактов Время измере ния на точке и точность измерений в этом случае определяется качеством клаибровки датчиков и измерительных каналов.
Известно устройство для реализации |способа геоэлектроразведки, содержащее блок датчиков (две взаимно перпендикулярные идентичные рамки с ферритовыми сердечниками / с предусилителями на треноге и измерительный пульт Г 1 3
Наиболее близким к предлагаемому является способ, согласно которому измеряют параметры естественного электромагнитного поля Уемли с помощью двух ортогональных приемных рамок путем отсчета на каждой исследуемой точке угла наклона большой оси эллипса поляризации электромагнитного поля к горизонту по шкале, связанной с рамками 23„
Известно также устройство, реализующее предлагаемый способ, содержащее две ортогональные приемные рамки, размещенные на горизонтальной оси вращения, ортогональной этим рамкам, и подключенные к входам соответствующих усилителей, отсчетное устройство, закрепленное на оси рамок, мостовую измерительную схему и индикатор, включенный в диагональ мостовой измерительной схемы СЗ .
Используются две взаимно перпендикулярные рамки, сигнал одной из них служит опорным ,а сигнал второй измеряемым напряжением фазочувствительного детектора. Для определения угла ot рамки вращают вокруг горизонтальной оси до тех пор, пока в одной из них (а именно, в вертикальной сигнал будет отсутствовать, а в другой станет максимальным, что соответствуЪт нулевому сигналу на выходе фазочувствительного детектора. По положению оси приемной рамки опорного сигнала относительно горизонта при этом определяют угол-А 3105 Недостаток известного способа определения угла заключается в необходимости нахождения такого положения приемных рамок, при котором сигнал в одном канале максимален, а в другом отсутствует. Так как естественное электромагнитное поле Земли имеет флуктуационный характер как по величине, так и по направлению, то определить положение, при котором сигнал в раме отсутствует, оказывается сложным. Поэтому рамки отклоняют от этого положения на некоторый угол в ту и другую сторону, чему соответствуют разнополярные сигналы на выходе фазочувствительного детектора. Затем этот угол делят пополам и получают положение рамок, соответствующее углу (, Оба канала в этом случае язляются измерительными и зона нечувствительнести, т„ео угол, на который надо повернуть датчики, чтобы в вертикальной рамке появился сигнал, определяет ся уровнем собственных шумов в этом канале Обычно этот угол составляет , Поэтому угол ,оС в этом случае оп ределяется со значительной погрешностью, а время измерения на точке зависит от урювня поля - при малом уровне поля оно увеличивается примерно в 2т5 раза. Недостатком известного устройства, реализующего предлагаемый способ, является необходимость индивидуального подбора длуг каждого прибора отдельных элементов схемы, что сильно затруднено из-за большого температурного разброса их характеристик Все это значительно понижает точность измерения и усложняет калибровку. Целью изобретения является повышение точности измерения и сокращение времени измерений. Поставленная цель достигается тем что согласно способу геоэлектроразведки, в котором измеряют параметры естественного электромагнитного поля Земли с помощью двух ортогональных приемных рамок путем отсчета на каждой исследуемой точке угла наклона ,большой оси эллипса поляризации электромагнитного поля Земли к горизонту по шкале, связанной с рамками, геомет рические оси приемных рамок устанавливают таким образом, что в них измеряют противофазные сигналы, которые интегрируют, затем рамки поворачивают до тех пор, пока амплитуды сигналов на интеграторах не станут равными, а 54 геометрические оси рамок установятся под углом к полному вектору электромагнитного поля и по углу поворота рамок судят о наклоне большой оси эллипса поляризации электромагнитного поля Земли к горизонту. Поставленная цель достигается также тем, что в устройство, содержащее две ортогональные приемные рамки, размещенные на горизонтальной оси вращения, ортогональной этим рамкам, и подключенные к входам соответствующих усилителей, отсчетное устройство, закрепленное на оси рамок, мостовую измерительную схему и индикатор, включенный в диагональ мостовой измерительной схемы, дополнительно введены два детектора с интеграторами, причем входы детекторов соединены с выходами соответствующих усилителей, выходы детекторов соединены с входами интеграторов, два выхода интеграторов - с различными вершинами мостовой схемы, а два других входа соединены вместе и образуют одну из точек диагонали моста, к KOTopofi подключен индикатор. При измерениях геометрические оси двух ортогональных приемных рамок устанавливаются таким образом, что в них наводятся противофазные сигналы, которые интегрируются за некоторый промежуток времени, затем рамки поворачиваются до тех пор, пока амплитуды, сигналов в них не станут равными, а геометрические оси рамок устанавливаются под углом 5 к полному вектору электромагнитного поля и по углу noBipoTa рамок судят о наклоне большой оси эллипса поляризации электромагнитного поля к горизонту. Так как уровень сигналов по обоим каналам в устройстве одинаков, то погрешность измерений уменьшается примерно в 3 раза по сравнению с известным. Полная погрешность устройстваг(х определяется по формуле: где J-g - погрешность чувствительности преобразователя; порог чувствительности; измеряемая величина, В этой формуле ,у- - величина, одинаковая как для известного, и так и для предлагаемого устройства, так как используются одни и те же приемные рамки. Поэтому можно считать, что полная погрешность устройства ависит от отношения dp/к,. Предположим что это отношение в известном устройстве равно 0,1 для канала в котором будет максимальный сигнал, и он равно 1 для канала, в котором сигнал отсутствуете Тогда для известного устройства определяем погрешность: Для предлагаемого уётройства в обоих каналах отношение .является одинаковым, и так как датмики располагаются под углом 45 к полному вектору, то оно выглядит: о Тогда X при тех же. допущениях, что и для известного, имеем IJ/2 )2 ./ LFl(wr(oh {Х/ Yoio fiO,2B Кроме того, измерения таким способом проводятся увереннее и для них требуется соответственнно в 1,5г2 ра за меньше времени. На чертеже изображена схема устро ства, реализующая предлагаемый способ, х1., . 1 Устройство состоит из двух ортого нальных приемных-рамок 1 и 2, отсчет ного устройства 3 усилителей f и 5 детекторов 6 и 7, интеграторов 8 Г Э сопротивлений 10 и П, образующих пл чи отношения моста, индикатора 12. Сигналы, наведенные электромагнит ным полем Земли в приемных рамках 1 и 2, поступают на усилители и 5. Ftocne усиления они подаются соответс венно на входы детекторов 6 и 7 с выходов детекторов они подаются на входы интеграторов 8 и 9 Разноименные сигналы с интеграторов подаются в два плеча моста постоянного тока двумя другими плечами которого являются сопротивленияJО и 11, В случае отклонения геометрических осей при:емных рамок 1 и 2 от угла kB по отношению к полному вектору эяектро магнитного поля Земли .в ту или иную сторону, в диагонали моста появлйетс постоянный ток прямого или обратногсг направления, что и отмечается индикатором 12, При равенстве тока в диагонали нулю производится отсчет угла «х по угломерному устройству 3, связанному с датчиками. При измерении предлагаемым способом сравниваются два равных по величине сигнала, равенство которых устанавливается по отсутствию разбаланса мостовой схемыо Эта процедура требует не более 1-2 мин на точке, Далее при работе с мостовой схемой можно оценивать отсутствие разбаланс ее по минимальному показанию индикатора, что оказывается сложным, так как минимальное показание индикатора не остается постоянным, а («Геняется с течением времени„ Значительно удобнее и быстрее производить измерения,.имбя разнополярные отклонения индикатора. Поэтому в мостовую схему введены детекторы о Так как электромагнитное по ле Земли имеет флуктуационный характер, то для сбалансирования двух случайных величин их надо проинтегрировать. Поэтому кроме детектора в мостовую схему введены еще и интеграторы Все вместе это и позволяет снизить время измерения на точке Предлагаемый способ направлен на поиск направления полного вектора электромагнитного поля, положение которого до начала измерений остается неизвестнымо Поворачивают рамки вокруг горизонтальной оси до тех пор, пока сигналы в них не сравняются, что соответствует нулевому разбалансу мостовой схемы. А это возможно только тогда, когда рамки встанут под углом 5 к полному вектору электромагнитного поля, либо к проекции этого вектора на вертикальную плоскость, проходящую через исследуемый профиль. По отсчетному устройству, связанному с рамками, и определяют угол наклона полного вектора электромагнитного поля к горизонту, либо наклона к горизонту проекции этого вект;ора на вертикальную плоскость, проходящую через исследуемый профиль Таким образом, в отличие от известных предлагаемый способ и устройство для его Осуществления позволяют измерять угол наклона большой оси эллипса поляризации электромагнитного поля Земли к горизонту d. при рав7 0561
ных сигналах в каналах, что эначитель но повышает точность измерений. Кроме того устройство для осуществления споМба значительно проще и легче известных и не нуждается в допол- 5 нительных средствах для калибровки, которая может быть легко осуществлена путем установки приемных рамок па158,
раллельно друг другу в электрсмагчитном поле Земли и приведением сопротивлением 11 мостовой схемы в равновесие. Все это облегчит условия эксплуатации, сократит время измерюния и позволит использовать для работы в полевых условиях менее квалифицированный Персонал.
