Изобретение относится к радиотех нике и может быть использовано в со ставе звуковоспроизводящей аппарату ры для уменьшения прослушиваемых шу мов. По основному авт.св. № 734868 и,з вестен динамический фильтр, содержа щий управляемый фильтр, управляющий вход которого подключен к выходу ам плитудного детектора, и алгебраический сумматор, подсоединенный к вхо ду и выходу управляемого фильтра, -а между выходом алгебраического сумматора и входом амплитудного детектора включены последовательно соединенные весовой фильтр, ограничитель по минимуму и частотный коррек тор Cl 3. . Однако данный динамический фильт искажает полезный сигнал при наличи в его составе бьютроменяющихся высо кочастотных составляющих-, что при использовании в звуковоспроизводящей аппаратуре проявляется в виде хрипов обусловленных тем, что на выходе амплитудного детектора во никают составляющие с частотой несколько десятков герц, в результате чего частота среза фил,ьтра . нижних частот изменяется с указанной выше частотой т.е. возникает эффект модуляции при большом уровне шумов. Цель изобретения - снижение эффекта модуляции при большом Уровне шумов. Поставленная цель достигается тем, что в динамическом фильтре, со держащем управляемый фильтр, управляющий вход которого подключен к выходу амплитудного детектора, и ал гебраический сумматор, подсоединенный к входу и выходу управляемого фильтра, а между.выходом алгебраического сумматора и.входом амплитуд ного детектора включены последовательно соединенные весовой фильтр, ограничитель по минимуму и частотный корректор, управляющий вход управляемого фильтра подключен к выходу амплитудного детектора через управляемый интегратор, между выходом амплитудного детектора и управляющим входом управляемого интегратора включены последовательно первый аттенюатор, первый компаратор, другой вход которого соединен с выходом управляемого интегратора, и . элемент ИЛИ, между выходом управляемого интегратора и другим входом элемента ИЛИ включены последователь но второй аттенюатор и второй компаратор, другой вход которого соеди нен с выходом амплитудного детектора. На чертеже изображена блок-схема предлагаемого фильтра. Динамический фильтр содержит управляемый фильтр 1, алгебраический сумматор 2, весовой фильтр 3, ограничитель 4 по минимумь, частотный корректор 5, амплитудный детектор 6, первый аттенюатор 7, второй аттенюатор 8, первый компаратор 9, второй компаратор 10, управляемый интегратор 11 и элемент ИЛИ 12. Предлагаемый динамический фильтр работа€ т следующим образом. Частота среза управляемого фильтра 1 изменяется в зависимости от уровня сигнала на его управляющем входе. Сигналы с входа и выхода управляемого фильтра 1 вычитаются в алгебраическом сумматоре 2,.на выходе которого формируются сигналы, спектр которых расположен выше частоты среза управляемого фильтра 1. Далее сигнал проходит через весовой фильтр 3, амплитудно-частотная характеристика которого зависит среднестатического спектра звуковой программы, и поЬтупает на ограничитель 4, порог ограничения которого выбирается с учетом характера шумов и полезной информации в звуковой программе. Сигнал с выхода ограничителя 4 через частотный корректор 5, имекпций подьем амплитудночастотной характеристики в области высоких частот, поступает на амплитудный детектор 6. Постоянная времени срабатывания амплитудного детектора 6 составляет, например 5... 10 мс, а время восстановления - 30...50 мс. Затем сигнал через управляемый интегратор 11 попадает на управляющий вход управляемого фильтра 1 . В зависимости от характера сигнала на входе управляемого интегратора 11 его постоянная времени меняется (например от 1 мс до 500 мс). При малых изменениях амплитуды сигнала на выходе амплитудного детектора б постоянная времени управляемого интегратора 11 велика, а при больших Изменениях мала. Предположим, что сигнал на выходе амплитудного детектора б увеличивается на небольшую величину. Если напряжение на выходе первого аттенюатора 7 при этом не превышает напряжение на выходе управляемого-интегратора 11, то не изменяется и уровень сигнала на первого компаратора 9 и, следовательно, на выходе элемента ИЛИ 12. При этом постоянная времени управляемого интегратора 11 также не измегжется. Если уровень сигнала на выходе первого аттенюатора 7 превышает уровень сигнала на выходе управляемого интегратора 11, то изменяется уровень сигнала на выходе первого компаратора 9 и, следовательно, на выходе элемента ИЛИ 12. Посто3 105 янная времени управляемого интегратора 11 резко уменьшается (с 500 до 1 мс) и сигнал с выхода амплитудного детектора 6 через управляемый, инт гратор 11 поступает на управляемый фильтр 1 практически бе,з изменений, изменяя частоту среза последнего. Аналогичным образом, при уменьшении уровня сигнала на выходе амплитудного детектора 6 на небольшую величину уровень сигнала на выходе второго компаратора 10 и, следовательно, на выходе элемента ИЛИ-12 не изменяется. Если уровень сигнала на выходе амплитудного детектора 6 становится ниже уровня сигнала на выходе второго аттенюатора 8, то изменяется уровень сигнала на выходе второго компаратора 1C и, следовательно, на выходе элемента ИЛИ 12. При этом сигнал с выхода амплитудного детек74тора 6 проходит через управляемый интегратор 11 на управляющий вход управляемого фильтра 1 практически без изменений. Таким образом, небольшие по уровню переменные составляющие сигнала на выходе амплитудного детектора 6 сглаживаются с помощью управляемого интегратора 11. Частота среза управляемого фильтра 1 практически не изменяется. Технико-эконог ческая эффективность предлагаемого динамического фильтра по сравнению с известным заключается в повышении качества звучания звуковых программ, особенно тех, в составе которых много быстроизменяющихся- высокочастотных сигналов или у.зкополосных шумов, за счет устранения хрипов при проаруши-, вании.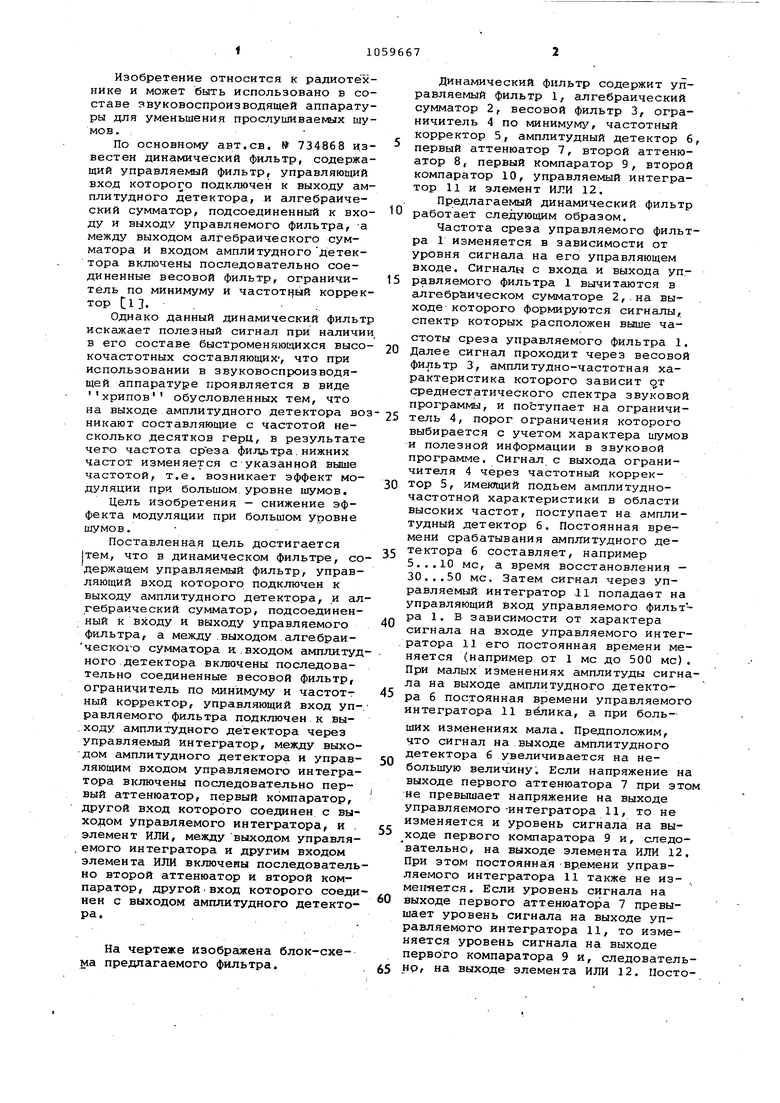

| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический фильтр | 1984 |
|
SU1171988A2 |
| Динамический фильтр | 1976 |
|
SU734868A1 |
| Динамический фильтр | 1981 |
|
SU1042158A1 |
| Динамический фильтр | 1983 |
|
SU1146795A1 |
| Шумоподавитель | 1983 |
|
SU1148545A1 |
| Устройство контроля комбинационных составляющих сигнала нелинейного четырехполюсника | 1985 |
|
SU1264111A1 |
| Устройство для регистрации и измерения интермодуляционных и побочных каналов приема в частотноселективных цепях нелинейных приборов | 1980 |
|
SU949830A1 |
| Устройство шумопонижения | 1983 |
|
SU1140149A1 |
| Демодулятор сигналов частотной телеграфии | 1987 |
|
SU1497756A1 |
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1996 |
|
RU2106073C1 |
ДИНАМИЧЕСКИЙ ФИЛЬТР пб авт.св. 734868, о т л и ч а юш и и с я тем, что, с целью снижения эффекта модуляции при большом уровне шумов, управляющий вход управляемого фильтра подключен к выходу амплитудного детектора через уп равляемый интегратор, между выходом амплитудного детектора и управляющим входом управляемого интегратора включены последовательно первый аттенюатор, первый компаратор, другой вход которого соединен с выходом управляемого интегратора, и элемент ИЛИ, между выходом управляемого интегратора и другим входом, элемента ИЛИ включены последовательно второй аттенюатор и второй компаратор, другой вход которого соединен с.выходом амплитудного детектора. (Л ел о: О) sj
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Динамический фильтр | 1976 |
|
SU734868A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
