(54) ДИНАМИЧЕСКИЙ ФИЛЬТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический фильтр | 1984 |
|
SU1171988A2 |
| Динамический фильтр | 1983 |
|
SU1146795A1 |
| Динамический фильтр | 1982 |
|
SU1059667A2 |
| Динамический фильтр | 1981 |
|
SU1042158A1 |
| Шумоподавитель | 1983 |
|
SU1148545A1 |
| Устройство для регистрации и измерения интермодуляционных и побочных каналов приема в частотноселективных цепях нелинейных приборов | 1980 |
|
SU949830A1 |
| Шумоподавитель для тракта запись- ВОСпРОизВЕдЕНиЕ МАгНиТОфОНА | 1979 |
|
SU830524A1 |
| Устройство шумопонижения | 1985 |
|
SU1275529A1 |
| Устройство коррекции для канала цветности системы СЕКАМ | 1991 |
|
SU1818708A1 |
| Устройство шумопонижения | 1986 |
|
SU1582195A1 |
I
Изобретение относится к радиотехнике и может использоваться в устройствах для понижения шума каналов записи, воспроизведения и передачи электрических сигналов.
Известен динамический фильтр для понижения шума с управлением частотой среза, который содержит фильтры низких и высоких частот с управляемыми частотами среза и цепи управления, каждая из которых содержит фильтр с полосой прозрачности, равной диапазону перестройки частоты среза соответствующего управляемого фильтра, усилитель и детектор, причем сигнал в каждую цепь управления поступает с входа устройства через фильтр высоких частот для управления частотой среза управляемого фильтра низких частот и соответственно через фильтр низких частот для управления частотой сре;за управляемого фильтра высоких частот. Таким образом, перестройка частот среза управляемых фильтров низких и высоких частот производится в зависимости от уровня составляющих сигнала, пропускаемых в цепи управления фильтрами высоких и низких частот соответственно 1.
Недостаток известного динамического фильтра состоит в неточности управления
частотами среза управляемых фильтров, вызывающей эффект модуляции щума в процессе управления.
Наиболее,близким по своей технической сущности к описываемому изобретению является динамический фильтр, содержащий управляемый фильтр, управляющий вход которого подключен к выходу амплитудного детектора, и алгебраический сумматор 2.
Недостатком известного устройства является неточность управления частотой сре10за в зависимости от граничной частоты составляющих сигнала со сложным спектром.
Целью изобретения является повышение точности управления частотой среза и снижение эффекта модуляции щума.
Поставленная цель достиг1ается тем, что
15 в динамическом фильтре, содержащем управляемый фильтр, управляющий вход которого подключен к выходу амплитудного детектора, и алгебраический сумматор, последний подсоединен к входу и выходу управляемого фильтра, а между выходом алгебраического сумматора и входом амплитудного детектора включены последовательно соединенные весовой фильтр, ограничитель по минимуму и частотный корректор.
Такой динамический фильтр позволяет осуществить точную перестройку частоты среза управляемого фильтра в зависимости от спектра и уровня составляющих входного сигнала с учетом изменения чувствител ности нагрузки.
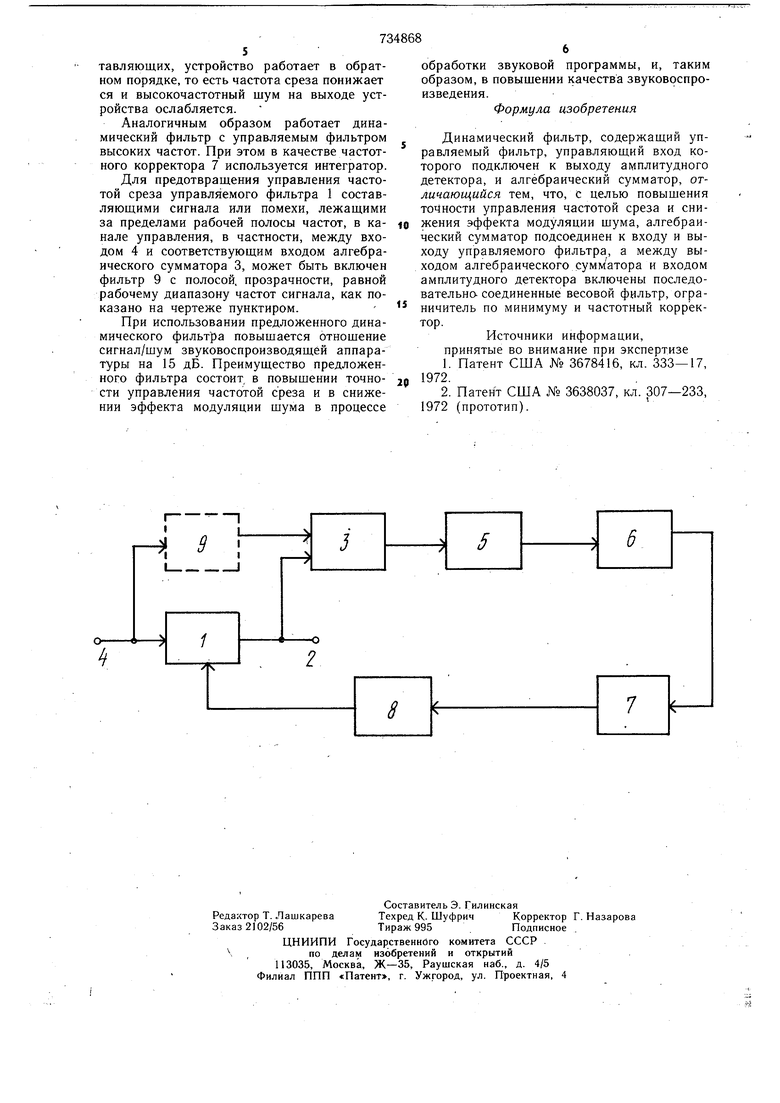
На чертеже представлена структурная электрическая схема динамического фильтра.
Динамический фильтр содержит управляемый фильтр с управляемой частотой среза, который предназначен для изменения полосы частот устройства в целом в зависимости от щирины спектра входного сигнала. Выход фильтра 1 соединен с выходом 2 устройства Б целом и с одним из входов алгебраического сумматора 3, имеющего инвертирующий и неинвертирующий входы. Алгебраический сумматор 3 предназначен для формирования полосы частот цепи управления путем вычитания из щирокополосного сигнала составляющих, располагающихся в полосе прозрачности управляемого фильтра 1. К другому входу алгебраического сумматора 3 подключен вход 4 управляемого фильтра 1. Выход алгебраического сумматора 3 соединен с входом весового фильтра 5.
Весовой фильтр 5 предназначен для формирования сигнала управления с учетом изменения чувствительности нагрузки в зависимости от частоты, например, с учетом изменения чувствительности слуха человека в зависимости от частоты звукового сигнала.
Выход весового фильтра 5 через ограничитель по минимуму 6 и частотный корректор 7 подключен к амплитудному детектору 8. Частотный корректор 7 обеспечивает соответствующую зависимость сигнала управления на выходе амплитудного детектора 8 от частоты составляющих сигнала управления, поступающих на выход ограничителя по минимуму 6. Амплитудный детектор 8 предназначен для выпрямления сигнала управления. Выход амплитудного детектора 8 соединен с управляющим входом управляемого фильтра 1..
Предложенный динамический фильтр работает следующим образом.
При отсутствии сигнала на входе 4 на выходе управляемого фильтра 1, например низкой частоты , а следовательно на выходе 2 устройства в целом и на одном из входов алгебраического сумматора 3 присутствуют лишь составляющие шума, располагающиеся в исходной полосе прозрачности управляемого фильтра 1. На другом входе алгебраического сумматора 3 присутствует широкополосный шум, поступающий со входа 4.
В результате вычитания узкополосного щума из широкополосного на выходе алгебраического сумматора 3 в цепи управления остаются высокочастотные составляющие шума. Далее эти составляющие щума через весовой фильтр 5 поступают на ограничитель по минимуму 6. Причем уровень бграничения ограничителя 6 выбран выше уровня щума так, что на выходе ограничителя б сигнал в цепи управления отсутствует и, следовательно, частота среза управляемого фильтра 1 не перестраивается. Таким образом, полоса частот устройства при отсутствии сигнала ограничена сверху, и составляющие щума, располагающиеся вьше исходной, частоты среза управляемого фильтра 1, существенно ослаблены и не прослущиваются.
I
При поступлении сигнала на вход 4 на выходе управляемого фильтра 1, а следовательно, на одном из входов алгебраического сумматора 3 появляются составляющие входного сигнала, располагающиеся в исходной полосе прозрачности управляемого фильтра 1. На другом входе алгебраического сумматора 3 присутствуют все составляющие входного сигнала в рабочем диапазоне частот. В результате вычитания на выходе алгебраического сумматора 3 присутствуют только высокочастотные составляющие сигнала. Эти составляющие через весовой фильтр 5 поступают на вход ограничителя по минимуму 6. Если уровень высокочастотных составляющих на входе ограничителя 6 превышает выбранный порог ограничения, то на выходе ограничителя 6 в цепи управления появляется сигнал, который корректируется частотным корректором 7. С выхода частотного корректора 7 сигнал управления поступает на вход амплитудного детектора 8, детектируется и подается на управляющий вход управляемого фильтра 1, перестраивая его частоту среза в сторону верхних частот. При этом на выход 2 устройства поступают без ослабления присутствующие во входном сигнале и превышающие выбранный порог ограничения высокочастотные составляющие сигнала. Одновременно в алгебраическом сумматоре 3 из щирокополосного сигнала вычитаются составляющие сигнала, расположенные в расширившейся полосе прозрачности управляемого фильтра 1, в результате чего из высокочастотных составляющих сигнала управления исключаются более интенсивные компоненты, лежащие вблизи частоты среза управляемого фильтра 1, и тем самым ослабляется их влияние на дальнейшую перестройку частоты.
По мере расщирения спектра входного сигнала в область высоких частотс уровнями составляющих, превышающими выбный порог ограничения, частота среза управляемого фильтра 1 перестраивается вплоть до крайней высщей частоты рабочего диапазона и все составляющие сигнала проходят на выход 2 устройства без ослабления. Несмотря на расширение полосы частот устройства, в силу эффекта маскировки, присутствующий одновременно с сигналом высокочастотный шум не прослущивается. По мере сужения спектра входного сигнала и ослабления уровня высокочастотных соетавляющих, устройство работает в обратном порядке, то есть частота среза понижает ся и высокочастотный шум на выходе устройства ослабляется. Аналогичным образом работает динамический фильтр с управляемым фильтром высоких частот. При этом в качестве частотного корректора 7 используется интегратор. Для предотвращения управления частотой среза управляемого фильтра 1 составляющими сигнала или помехи, лежащими за пределами рабочей полосы частот, в канале управления, в частности, между входом 4 и соответствующим входом алгебраического сумматора 3, может быть включен фильтр 9 с полосой, прозрачности, равной рабочему диапазону частот сигнала, как показано на чертеже пунктиром. При использовании предложенного динамического фильтра повышается отношение сигнал/шум звуковоспроизводящей аппаратуры на 15 дБ. Преимущество предложенного фильтра состоит, в повыщении точности управления частотой среза и в снижении эффекта модуляции шума в процессе обработки звуковой программы, и, таким образом, в повыщении качества звуковоспроизведения. Формула изобретения Динамический фильтр, содержащий управляемый фильтр, управляющий вход которого подключен к выходу амплитудного детектора, и алгебраический сумматор, отличающийся тем, что, с целью повышения тог1ности управления частотой среза и снижения эффекта модуляции щума, алгебраический сумматор подсоединен к входу и выходу управляемого фильтра, а между выходом алгебраического сумматора и входом амплитудного детектора включены последовательно соединенные весовой фильтр, ограничитель по минимуму и частотный корректор. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3678416, кл. 333-17, 1972. 2.Патент США № 3638037, кл. 307-233, 1972 (прототип).
