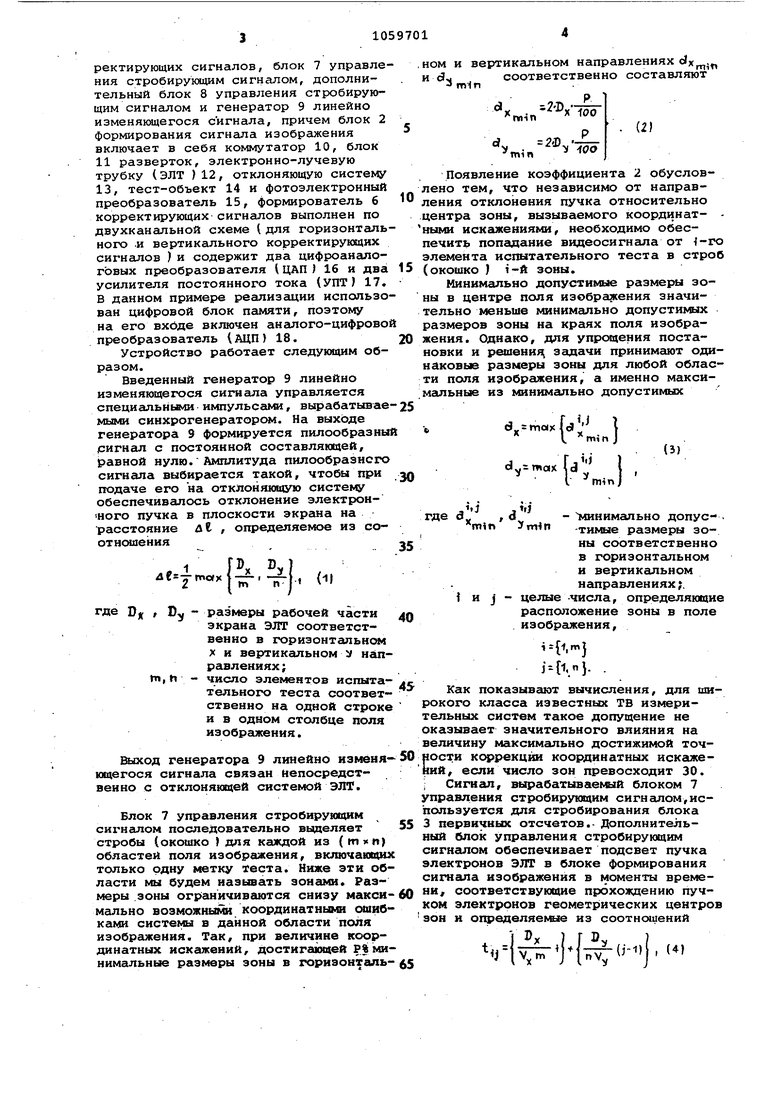
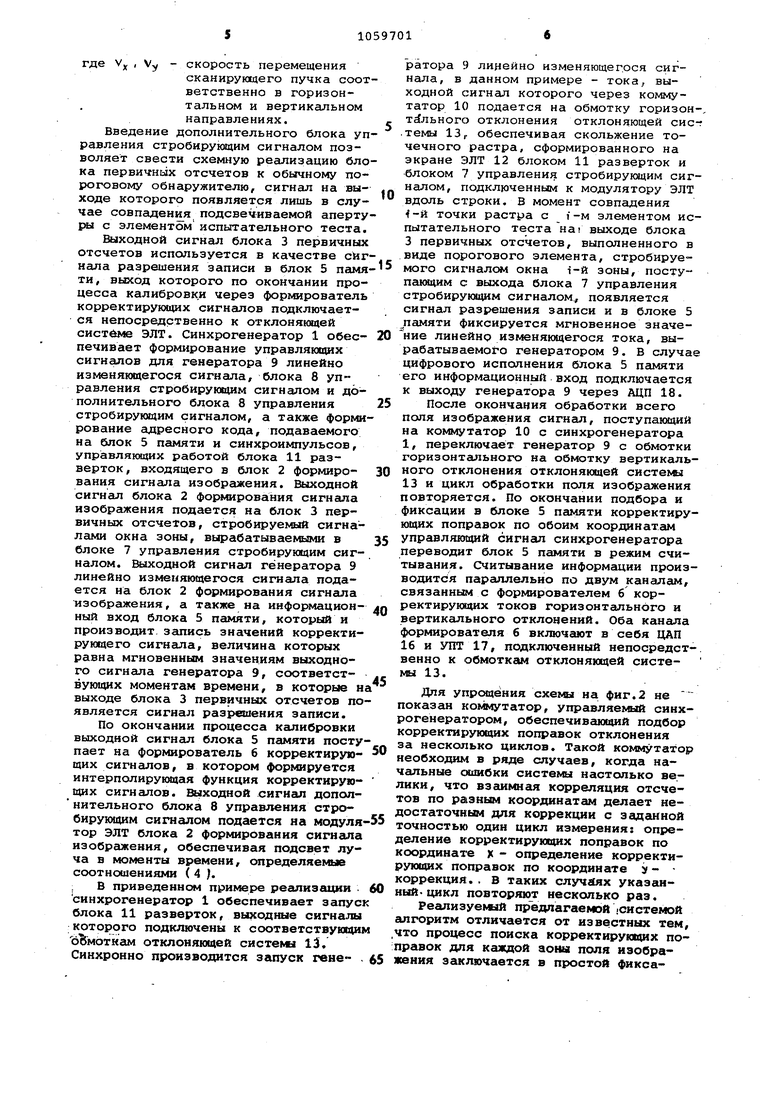
Изобретение относится к телевизионной (ТВ) измерительной технике и может быть использовано в технике ТВ анализа и обработки изображений при необходимости решения задач автомати зированной коррекции координатных искажений датчика изображения, содер жащего электронно-лучевую трубку (ЭЛТ). Как правило, коррекции предшествует так называемая калибровка. состоящая в определении матрицы оши бок отклонения, измеренных в(п г Ьочках поля изображения. На основании полученной матрицы ошибок отклонения посредством обра(ботки на электронно-вычислительной машине (ЭВМ) или схемными методами формируется матрица корректируняцих токов размерностью (т л п ) , которая дает возможность известными способами сформировать интерполирующую функ цию корректирующего сигнала. Размерность матрицы зависит от требуемой точности калибровки и последующей коррекции, а также от величины макси мальных ошибок, присущих отклоняющей системе датчика изобрг сения. Калибровка координатных искгкжений датчика изображения, содержгицего просвечивающую ЭЛТ, заключается в обмере координат элементов специального испытательного теста, помещаемого между ЭЛТ и фотоприемником. Э«и яэыереияя в ряде существующих систем проводят ся автоматизированными методеши, но при обязательном участии оператора. Известны устройства автоматической коррекции координатных искажений растра, используемые в телевизионной измерительной системе ЭЛАС, содержащие последовательно соединенные синхрогенератор, блок формирования сигнала изобргикения и блок nej}Bj94№dX отсчетов, подключенные к ЭВМ fl} и 2.. Известно также устройство автома тической коррекции координатных исКс1жений растра, используемое в теле визионной измерительной системе МЭЛАС, содержащее последовательио соединенные синхрогеиератор, блок формирования сигнала изображения и блок обработки информации з. Недостатком известных устройств является необходимость участия oneратора в процессе коррекции либо дл обеспечения самого процесса иэмереНИИ при кгшибровке, либо для обслуживания ЭВМ. Наиболее близким по технической сущности к предлагаемому является устройство автоматической коррекции координатных искажений растра, соде жащее последовательно соединенные синхрогенератор, блок формировгшия сигнала изобргикения, обеспечивающий предварительную обработку входного. сигнала, а также формирование двумерной функции R (х,у), пропорциональной яркости или оптической плотности (прозрачности) изображения, блок пер-, вичных отсчетов, выполняющий операции преобразования двумерной функции изображения R (X,j в одномерный виеосигнал U (t) , предварительную обработку этого сигнала и формирование первичных отсчетов амплитуды этого видеосигнала, соответствующего опеделенным значениям параметров считываквдей апертуры, и блок формирования корректирукндих сигналов, синхровход которого соединен с вторым выхоом синхрогенератора, а выход - с ходом коррекции блока формирования игнала изображения, а также блок, правления стробирующим сигналом, ход которого подключен к третьему ыходу синхрогенератора, а выход - к ходу управления блока первичных отчетов 4. Недостаток известного устройстванизкая. точность коррекции координатных искажений. Цель изобретения - повьшение точности коррекции координатных искажений растра. Указанная цель достигается тем, что в устройство автоматической коррекции ксюрдинатных искажений растра, содержащее последовательно соединенные синхрогенератор, блок формирования сигнала изображения, блок первичньцс отсчетов и блок формирования ко рректирующих сигналов, синхро вход которого соединен с вторам выхо дом синхрогенератора, а выход - с {входом коррекции блока формирования сигнала изображения, а также блок управления стробирующим сигналом,вхсш которого подключен к третьему выходу синхрогенератора, а выход - к входу управления блока первичных отсчетов, введены дополнительный блок управле ния стробирующим сигнгшам, вход которого соединен с четверТЕА выходом синхрогенератора, а выход - с сигнальн дл входом блока фop aIpoвaния сигнала изображения, и генератор линейно изменяхжегося сигнала,вход которого соединен с пятках выходом синхрогенератора, а выход - с управ ляющими 1зходс1ми блока формирования .сигнала иэобргисения и блока форкшрования корректирующих сигналов. На фиг.1 представлена структурнгм схема устройства; на фиг.2 - один иэ возможных варигштов регшизгщии предлагаемого устройства. Устройство содержит синхрогенератор 1, блок 2 формирования сигнала изображения, блок 3 первичных отсчетов, блок 4 формирования корректирующих сишалов, включающий в себя ок 5 памяти и формирователь б корректирующих сигналов, блок 7 управления стробирующим сигнсшом, дополнительный блок 8 управления стробирующим сигнсШом и генератор 9 линейно изменяющегося сигнала, причем блок 2 формирования сигнала изображения включает в себя коммутатор 10, блок 11 разверток, электронно-лучевую трубку (ЭЛТ ) 12, отклоняющую систему 13, тест-объект 14 и фотоэлектронный преобразователь 15, формирователь 6 корректирующих сигналов выполнен по двухканальной схеме ( для горизонталь ного -И вертикального корректирующих сигнсшов ) и содержит два цифроангшоговых преобразователя 1ЦАП ) 16 и два усилителя постоянного тока (УПТ) 17, В данном примере реализации использован цифровой блок Пс1мяти, поэтому на его входе включен аналого-цифровой преобразователь (АЦП) 18. Устройство работает следующим образом. Введенный генератор 9 линейно изменяющегося сигнала управляется специальньв и импульсами, вырабатывав мыми синхрогенераторснх. На выходе генератора 9 формируется пилообразны ригнал с постоянной составляющей, равной нулю.Амплитуда пилообразного сигнала выбирается такой, чтобы при подаче его на отклонякяцую систему обеспечивалось отклонение электронного пучка в плоскости экрана на расстояние Л1 , определяемое из соотнсхаения,«х,%|., о, где D,( , V размеры рабочей части экрана ЭЛТ соответственно в горизонтёотьном X и вертикальном V направлениях ; Т1, и - число элементов испыта- тельного теста соответственно на одной строке и в одном столбце поля изобргикения. Шход генератора 9 линейно изменяющегося сигнала связан иепосредствеино с отклонякщей системой ЭЛТ. Блок 7 управления стробируихцим сигналом последовательно вьеделяет стробы (окошко ) для каждой из (mxn) областей поля изображения, вкточакщих только одну метку теста. Ниже эти области мы будем называть зонами. Размеры зоны огр гшичиваются снизу максимально возможными координатными ошибками системы в данной области поля изобраикення. Так, при величине координатных искажений, достига оцей Р% NOIнимальные размеры зоны в горизонталь,ном и вертикальном направлениях dx. и . соответственно составляют Появление коэффициента 2 обусловлено тем, что независимо от направления отклонения пучка относительно центра зоны, вызываемого координат- ными искажениями, необходимо обеспечить попадание видеосигнала от {-го элемента испытательного теста в строб (окошко ) i-й зоны. Минимально допустимые размеры зоны в центре поля изображения значительно меньше минимально допустимых размеров зоны на краях поля изображения. Однако, для упрощения постановки и решени; задачи принимают одинаковые размеры зоны для любой области поля изображения, а именно максимгшьные из минимгшьно допустимых djj Tiax I mini ( I 1 ) - минимально допус- . min mln -тимые размеры зоны соответственно в горизонтальном и вертикальном направлениях;, f и j - целые -числа, определяющие расположение зоны в поле изображения. .m} J--{l..iКак показывают вычисления, для широкого класса известных ТВ измерительных систем такое допущение не оказывает значительного влияния на величину максимально достижимой точности коррекции координатных искгикеннй, если число зон превосходит 30. Сигнгш, вырабатываемый блоком 7 правления стробирующим сигналом,используется для стробирования блока 3 первичных отсчетов.- Дополнительный блок управления стробирующим сигнсШом обеспечивает подсвет пучка электронов ЭЛТ в блоке формирования сигнала изображения в моменты времени, соответствующие прохождению пучком электронов геометрических центров зон и ощ еделяеьще из соотношений где v , Vy - скорость перемещения сканирунхцего пучка соот ветственно в горизонтальном и вертикальном направлениях. Введение дополнительного блока уп равления стробирующим сигналом позволяет свести схемную реализацию бло ка первичных отсчетов к обычному порогхэвому обнаружителю, сигнал на выходе которого появляется лишь в случае совпадения подсвечиваемой аперту ра с элементо м испытательного теста. &1ХОДНОЙ сигнал блока 3 первичных отсчетов используется в качестве сиг нала разрешения записи в блок 5 памя ти, выход которого по окончании процесса калибровки через формирователь корректирукхцих сигналов подключается непосредственно к отклоняквдей системе ЭЛТ. Синхрогенератор 1 обеспечивает формгфование управляющих сигналов для генератора 9 линейно изменяющегося сигнала, блока 8 управления стробирукадим сигналом и дополнительного блока 8 управления стробирующим сигналом, а также форми рование адресного кода, подаваемого на блок 5 памяти и синхроимпульсов, управляюощх работой блока 11 разверток, входящего в блок 2 формирования сигнала изображения. Выходной сигнал блока 2 формирования сигнала изображения подается на блок 3 первичных отсчетов, стробируемый сигналами окна зоны, вырабатываекблии в блоке 7 управления стробирующим сигналом. Выходной сигнал генератора 9 линейно изменяющегося сигиала подается на блок 2 формирования сигнала изображения, а также на инфо1 4ационный вход блока 5 памяти, который и производит запись значений корректирующего сигнала, величина которых равна мгновенным значениям выходного сигнала генератора 9, соответствующих моментам времени, в которые н выходе блока 3 первичных отсчетов по является сигнал разрешения записи. По окончании процесса калибровки выходной сигнсш блока 5 памяти посту пает на формирователь 6 корректирующих сигналов, в котором формируется интерполирукяцая функция корректирующих сигналов. Выходной сигнал дополнительного блока 8 управления стробирующим сигналом подается на модуля тор ЭЛТ блока 2 формирования сигиала изображения, обеспечивая подсвет луча в моменты времени, определяемые соотношениями ( 4 ). . В приведенном примере реализации синхрогенератор 1 обеспечивает запус блока 11 разверток, выходные сигналы которого подключены к соответствующи оВмотигил отклоняющей системы 13. Синхронно производится запуск генератора 9 линейно изменяющегося сигнала, в данном примере - тока, выходной сигнал которого через коммутатор К) подается на обмотку горизон-, тгСльного отклонения отклоняющей сисг темы 13,. обеспечивая скольжение точечного растра, сформированного на экране ЭЛТ 12 блоком 11 разверток и блоком 7 управления стробируквдим сигналом, подключенным к модулятору ЭЛТ вдоль строки, в момент совпадения -й точки растра с I-M элементом испытательного теста на выходе блока 3 первичных отсчетов, выполненного в виде порогового элемента, стробируемого сигналом окна i-й зоны, поступгиощим с выхода блока 7 управления стробирующим сигналом, появляется сигнал разрешения записи и в блоке 5 Пс1мяти фиксируется мгновенное значение линейно изменяющегося тока, вырабатываемого генератором 9. В случае цифрового исполнения блока 5 памяти его информационный вход подключается к выходу генератора 9 через АЦП 18. После окончания обработки всего поля изображения сигнал, поступающий на коммутатор 10 с синхрогенератора 1, переключает генератор 9 с обмотки горизонтального на обмотку вертикального отклонения отклоняющей систекы 13 и цикл обработки поля изображения повторяется. По окончании подбора и фиксации в блоке 5 памяти корректирующих поправок по обоим координатам управляющий сигнал синхрогенератора переводит блок 5 памяти в режим считывания. Считывание информации производится параллельно по двум каналам, связанным с формирователем 6 корректируккцих токов горизонтального и вертиксшьного отклонений. Оба канала формирователя 6 включают в себя ЦАП 16 и УПТ 17, подключенный непосредственно к обмоткг|м отклоняющей системы 13. Для упрощения на фиг.2 не показан коммутатор, управляекогй синхрогенератором, обеспечивающий подбор корректирующих поправок отклонения за несколько циклов. Такой коммутатор необходим в ряде случаев, когда начальные сн1Шбки системы настолько велики, что взаимная корреляция отсчетов по разным координатам делает недостаточнЕЯ4 для коррекции с задгшной точностью один цикл измерения; определение корректирующих поправок по координате X - определение корректирующих поправок по координате у - коррекция. . в таких случгсях указешный-цикл повторяют несколько раз. Реализуемый предлагаемой -систеной алгоритм отличается от известных тем, что процесс поиска корректирующих поправок для каждой аоны поля изображения заключается в простой фиксации искомого значения тока по сигналу порогового обнаружителя, появляю-щемуся в момент совпадения проекции подсвеченной апертуры на плоскости испытательного теста с одним из его элементов, отличающимся от всего поля изображения оптической плотностью.
Применение предлагаемой системы позволит сократить время калибровки с 1 - 2 ч до 15-30 мин и повысить точность коррекции за счет . двойногр стробирования сигнала от испытательного теста. 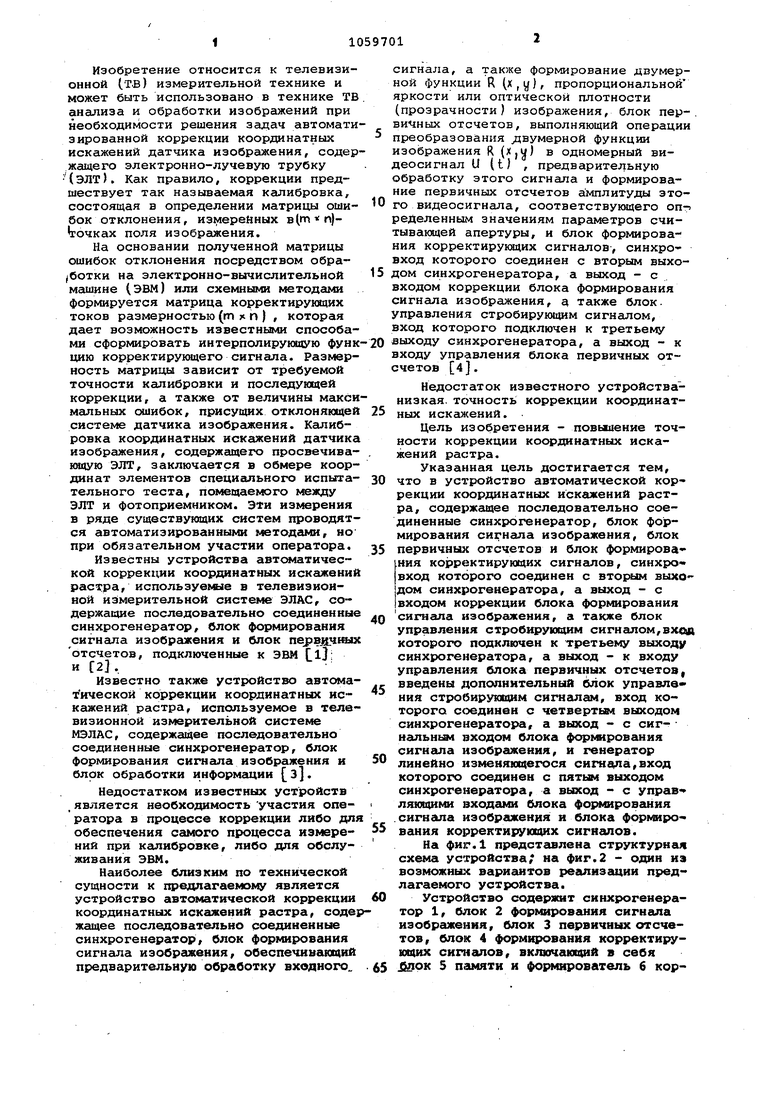

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования сигнала для коррекции искажений телевизионного изображения и устройство для его реализации | 1982 |
|
SU1109945A1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
| Устройство для измерения параметров телесигнала | 1981 |
|
SU1029206A1 |
| Устройство для коррекции апертурных искажений электронно-лучевой трубки | 1986 |
|
SU1334394A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1317687A2 |
| Устройство для вывода информации на экран электронно-лучевой трубки | 1988 |
|
SU1578738A1 |
| Устройство для ввода информации | 1985 |
|
SU1293725A1 |
| Устройство для измерения координат объекта | 1990 |
|
SU1737754A1 |
| Устройство формирования сигнала коррекции фокусировки луча электронно-лучевой трубки | 1977 |
|
SU680195A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ КООРДИНАТНЫХ ИСКАЖЕНИЙ РАСТРА, содерж ее последовательно соединенные синхрогенератор, блок формирования сигнала изображения, блок первичных отсчетов и блок формирования корректирующих сигнгшов, синхровход которого соединен с вторым выходом синхрогенератора, а выход. с входом коррекции блока формирования сигнала изображения, а также блок управления стробирующим сигналом, вход которого подключен к третьему выходу синхрогенератора, а выход - к входу управления блока первичных отсчетов, отли. чаюце е с я тем, что, с целыб повьшения точности коррекции, в него введены дополнительный блок управления стро-|§ бирукхцим сигналом, вход которого (Л соединен с четвертым выходом синхрогенератора, а выход - с сигнальным входом блока формирования сигнала изображения, и генератор линейноизменяющегося сигнала, вход которого соединен с пятым выходом синхрогенератора, а выход - с управляющими входами блока формирование сигнала изобргикеиия и блока фо{ 1ирования ел корректирующих сигналов. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Уваров В.А | |||
| .Прецизионная система измерения изображений со следами ядерных частиц в пузырьковой камере | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| , 1980 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| и др | |||
| Сканирукхций автомат на ЭЛТ | |||
| Препринт ОИЯИ, Р-10-3631, Дубна, 1967 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Телевизионные измерительные системы | |||
| М., Связь, 1980, с | |||
| Кулачковое зацепление для сменных пленочных кассет | 1955 |
|
SU125130A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
