о о
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обратного хода грейферного ткацкого станка | 1985 |
|
SU1513047A1 |
| Ткацкий станок | 1990 |
|
SU1824464A1 |
| СПОСОБ ВВОДА КОНЦОВ УТОЧНОЙ НИТИ В ТКАЦКОМ СТАНКЕ С ДОПОЛНИТЕЛЬНЫМИ УТОЧНЫМИ ЭФФЕКТАМИ | 2014 |
|
RU2609188C1 |
| Механизм управления сменой рисунка по утку к бесчелночному ткацкому станку | 1980 |
|
SU1055788A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТКАЦКОЙ МАШИНЫ, ВКЛЮЧАЮЩЕЙ В СЕБЯ ЗЕВООБРАЗУЮЩУЮ МАШИНУ | 2009 |
|
RU2482230C1 |
| Устройство для контроля обрыва уточной нити | 1984 |
|
SU1194923A1 |
| Устройство к ткацкому станку для его пуска и останова при обрыве нитей основы или утка и недолете челнока | 1958 |
|
SU119842A1 |
| Устройство для контроля уточных нитей при многоцветном питании на бесчелночном ткацком станке | 1982 |
|
SU1121332A1 |
| Приспособление для автоматической смены шпуль в многочелночных ткацких станках с подъемными коробками | 1930 |
|
SU28872A1 |
| Устройство для смены рисунка по утку к бесчелночному ткацкому станку | 1990 |
|
SU1756413A1 |
1. УСТРОЙСТВО ДЛЯ ОБНАРУЖЕ НИЯ ОБРЫВА УТКА В ЗАЖИМНЫХ ТКАЦКИХ СТАНКАХ, содержащее моторредукторную группу, эле1;тромагнитиый соединитель, . . - -. двуплечий рычаг, соединенный с механическим соединителем, уточной коробкой и зевообразовательным механизмом, о тли ч а ю и ее с я тем, что к уточной коробке 2 аксиально подвйжн закреплен штифт 1, перед которым шарнирно установлена пружина 3, касающаяся микровыключателя .19, , соединенного через блок управления |4 с моторредукторной группой 5, несущей пространственный кула;Чок 8, расположенный у одного конца двуплечего рычага 9, близко от которого установлен ми кровыключатель 18, средин ен ный через блок управления 4 с электромагнитным соединителем 11 для привода с в движение зевообразующего механиз- ма. л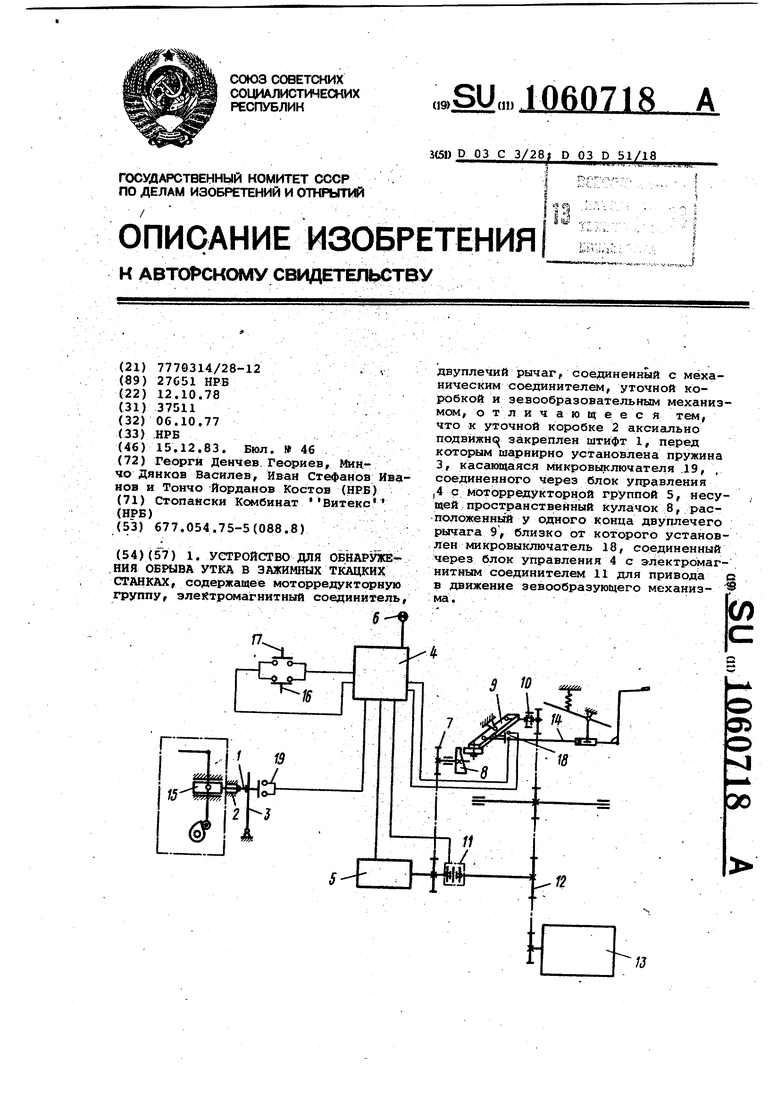
;j
одного утка при пуске станка после устранения порванного утка.
Блок управления может получать сигнал для пуска в ход моторредукторной группы не только штифтом 1, но и кнопками прямого или обратного хода 1G и 17,
Устройство работает следующим . образом
При обрыве утка штифт 1 приводится в движение ползуном 15 наблюдателя утка (не показан).
При этом движении он приводит в ход черезпружину 3 микровыключатель 19, который подключает цепь блока управления 4. Блок-управления подает напряжение двигателю моторредукторной группы 5. Одновременно с этим включается сигнальная пампа б. Моторредукторная группа 5 посредством :цепной передачи .7 приводит в движение пространственный кулачок 8, отклоняющий двуплечий рычаг 9, который выключает механический соединитель 10. Зевообразуюсций механизм 13 освобождается от главного привода CTkHKa. Одноврв«4енно двуплечий рычаг 9 при отклонении посредствен {шкровыключателя 18 подает сигнал блоку управления 4, который посредством электромагнитного соединителя
11 приводит в действие зевообразуюци механизм 13 в обратном направлении до положения найденного утка. Пр отклонении рычаг 9 перемещает штангу 14, который включает механизм для проведения одного утка при пуске станка после устранения оборванного утка (не показан).
К концу рабочего хода моторредукторной группы 5 соответственно зевообразующего механизма 13 кулачок 8 располагается своей нижней частью против двуплечего рычага 9. После окончания рабочего хода механический соединитель 10 вместе с двуплечим рычагом 9 занимает исходное положение . Рычаг 9 освобождает микровыключатель 18, электрическая цепь размыкается, и устройство готово к следующему включению.,
В случае, если необходимо двукратное или многократное включение зево;образующего механизма в прямом или обратном направлении, сигнал к блоку упраьления 4 подается непосредственно кнопкакм 16 и 17.
Признано изобретением по результатам экспертизы, осуществляемей ведомством по изобретательству Народной республики Болгарии.
