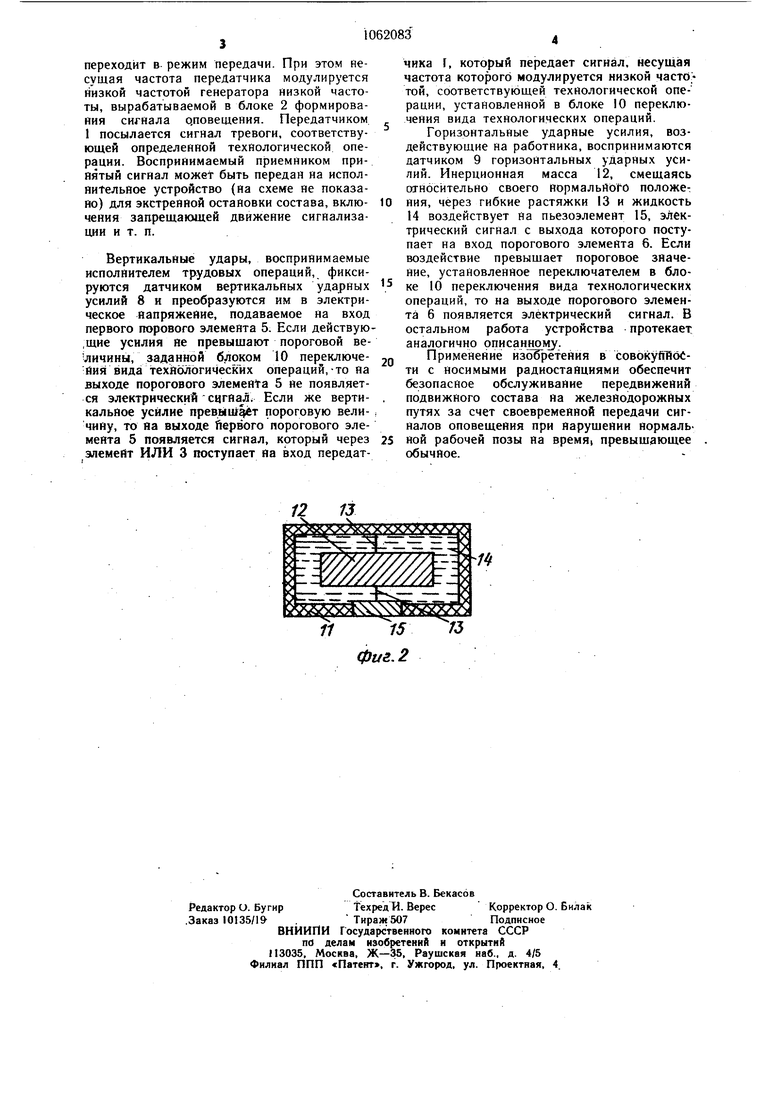
Изобретение относится к устройствам автоматического контроля положения тела человека и может быть использовано на железнодорожном транспорте для повышения безопасности труда персонала, непосредственно обслуживающего передвижения подвижного состава. Известно устройство для оповещения об опасности при выполнении человеком трудовых операций, содержащее закрепленные на теле человека датчик положения тела человека в проЛранстве, датчики вертикальных и горизонтальных усилий, пороговые элементы, одни входы которых соедийены соответственно с выходами датчика вертикальных ударных усилий и датчика горизонтальных ударных усилий, блок формирования сигнала оповещения, выход которого подключен к одному входу передат; .чика 1. Недостатком известного устройства является то, что им регистрируется любое изменение положения тела человека, что не обеспечивает достоверности оповещения при работах, например, при расцеплении составов. Цель изобретения - повышение достоверности оповещения. Поставленная цель достигается тем, что устройство для оповещения об опасности при выполнении человеком трудовых операций, содержащее; закрепленные на теле человека датчик положения тела человека в пространстве, . датчики вертикальных и горизонтальных усилий, пороговые элементы, одни входы которых соединены соответственно с выходами датчика вертикальных ударных усилий и датчика горизонтальных ударных усилий, блок формирования сигнала оповещения, выход которого подключен к одному входу передатчика, снабжено элементом ИЛИ, блоком временной задержки и блоком переключения вида технологических операций, один выход которого соединен с вторыми входами первого и второго пороговых элементов, а другой выход - с входом блока формирования сигнала оповещения и с одним входом блока временной задержки, другой вход которого связан с выходом датчика положения тела человека в пространстве, причем первый вход элемента ИЛИ соединен с выходом блока выдержки времени, а второй и третий входы подключены к соотвествующим выходам пороговых элементов, а выход соединен с другим входом передатчика. Кроме того, датчик горизонтальных ударных усилий содержит выполненный в виде полого цилиндра, заполненного жидкостью. корпус, вмонтированный в него пьезоэлемент и связанную с последним и с корпусом гибкими растяжками инерционную маесу, разме|ценйую в корпусе. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - конструкция датчика горизонтальных ударнУх усилий, разрез. Устройство содержит передатчик 1, к одному входу которого подключен блок 2 формирования сигнала оповещения, а к другому через элемент ИЛИ- 3 - блок 4 временной задержки, пороговый элемент 5 и пороговый элемент 6. Выход датчика 7 положения тела человека в пространстве соединен с входом блока 4 временной задержки. Выходьл датчика 8 вертикальных ударных усилий и датчика 9 горизонтальных ударных усилий соединены с первыми входами пороговых элементов 5 и 6 соответственно. Выход блока 10 переключения вида технологических операций соединен с вторыми входами пороговых элементов 5 и 6, с блоком 4 временной задержки и блоком 2 формирования сигнала оповещения. Датчик 9 горизонтальных ударных усилий содержит корпус 11, выполненный в виде полого цилиндра, внутри которого симметрично относительно его оси расположена цилиндрическая инерционная масса 12, закрепленная внутри корпуса 11 гибкими растяжками 13. Внутреннее пространство корпуса И заполнено жидкостью 14. Изменение давления жидкости восрпинимается пьезоэлементом 15. Устройство работает следующим образом. Исполнитель технологических операций снабжается устройством для контроля положения тела человека, которое представляет собой приставку к носимым радиостанциям. Датчик 7, датчик 8 вертикальных усилий и датчик 9 горизонтальных ударных усилий закрепляются на одежде, например на поясе исполнителя. Перед началом работы исполнитель с помощью переключателей в блоке 10 .переключения вида технологических операции задает режим ра-боты устройства: максимальную длительность отклонения от стандартной рабочей позы, пороги срабатывания пороговых элементов 5 и 6 и частоту генератора низкой частоты в блоке 2 .формирования сигнала оповещения, соответствующую данному виду технологической операции. Если в процессе выполнения какой-либо технологической операции, например торможения вагонов, отклонение от вертикального положения не превыщает известной на основе .длительного опыта величины, например 2,5 с, то датчик положения срабатывает, но его сигнал не передается на вход элемента ИЛИ 3. Цвтчик 7 положения тела человека представляет собой ртутный качающийся контакт. Если продолжительность отклонения от вертикального положения исполнителя превы шает 2,5 с, то датчик 7 вырабатывает сигнал и запускает блок 4 временной задержки, Сигнал с выхода блока 4 через элемент ИЛИ 3 поступает йа вход передатчика 1, который переходит в режим передачи. При этом несущая частота передатчика модулируется низкой частотой генератора низкой частоты, вырабатываемой в блоке 2 формирования сигнала о.повевдения. Передатчиком 1 посылается сигнал тревоги, соответствующей определенной технологической операции. Воспринимаемый приемником принятый сигнал может быть передан на исполнительное устройство (на схеме не показано) для экстренной остановки состава, включения запрещающей движение сигнализации и т. п. Вертикальные удары, воспринимаемые исполнителем трудовых операций, фиксируются датчиком вертикальных ударных усилий 8 и преобразуются им в электрическое напряжейне, подаваемое на вход первого порового элемента 5. Если действую ,щие усилия не превышают пороговой веиичины, заданной блоком 10 переключейия вида технологических операций,-то на выходе порогового элeмeйta 5 не появляется электрическийСИгна л. Если же вертикальное усилие превышает пороговую величину, то на выходе Первого порогового элемента 5 появляется сигнал, который через элемейт ИЛИ 3 поступает на вход передатчика f, который передает сигнал, несущая частота которого модулируется низкой часто;той, соответствующей технологической операции, установленной в блоке 10 переключения вида технологических операций. Горизонтальные ударные усилия, воздействующие на работника, воспринимаются датчиком 9 горизонтальных ударных усилий. Инерционная масса 12, смещаясь относительно своего нормального положен ния, через гибкие растяжки 13 и жидкость 14 воздействует На пьезоэлемент 15, электрический сигнал с выхода которого поступает на вход порогового элемента 6. Если воздействие превыщает пороговое значение, установленное переключателем в блоке 10 переключения вида технологических операций, то на выходе порогового элемента 6 появляется электрический сигнал. В остальном работа устройства протекает аналогично описанному. Применение изобретейия в совокуйИбСти с носимыми радиостанциями обеспечит безопасное обслуживание передвижений подвижного состава на железнодорожных путях за счет своевременной передачи сигналов оповещения при нарущении нормальной рабочей позы на время, превыщзющее обычное.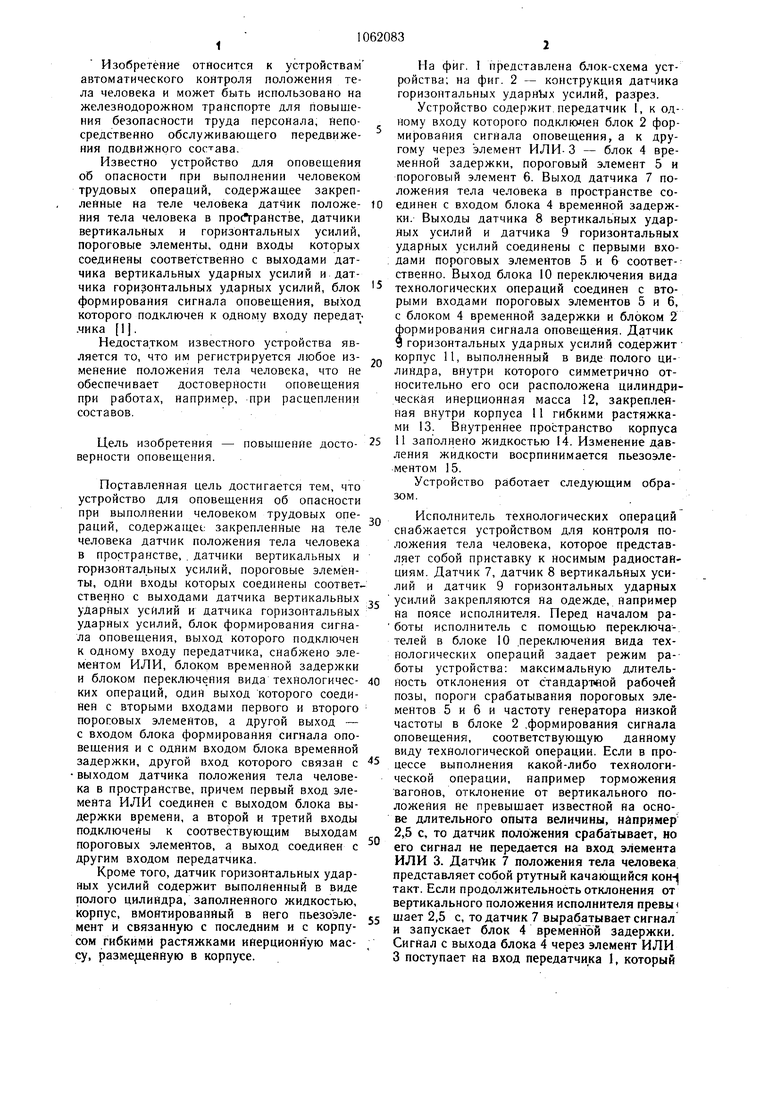
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления технологическим процессом сортировочной станции с контролем и перераспределением трудовых ресурсов и система для его осуществления | 2024 |
|
RU2839171C1 |
| ЦИФРОВАЯ СИСТЕМА РАДИОСВЯЗИ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2014 |
|
RU2546143C1 |
| СПОСОБ МОНИТОРИНГА ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327415C1 |
| ТРЕНАЖЕР ДЛЯ ВЫРАБОТКИ НАВЫКОВ ВЫЧЕСЫВАНИЯ ПУХА У ЖИВОТНЫХ | 1995 |
|
RU2086119C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПРЕДМЕТОВ, СПРЯТАННЫХ ПОД ОДЕЖДОЙ НА ТЕЛЕ ЧЕЛОВЕКА | 2013 |
|
RU2522853C1 |
| Автоматический способ и сеть широкомасштабной противоградовой защиты | 2012 |
|
RU2631894C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2648794C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ОПАСНОСТИ ЦУНАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454686C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2020 |
|
RU2732266C1 |
1. УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ ОБ ОПАСНОСТИ ПРИ ВЫПОЛНЕНИИ ЧЕЛОВЕКОМ ТРУДОВЫХ ОПЕРАЦИЙ, преимущественно при расцеплении вагонов, содержащее закрепляемые на теле человека датчик положения тела человека в пространстве, датчики вертикальных и горизонтальных усилий, пороговые элементы, одни входы которых соединены соответственно с выходами датчика вер-. ,тикальных ударных усилий и датчика горизонтальных ударных усилий, блок формирования сигнала оповещения, выход которого подключен к одному входу передатчика, отличающееся тем, что, с целью повы-. щения достоверности, оно снабжено элементом ИЛИ, блоком временной задержки и блоком переключения вида технологических операций, один выход которого соединен с вторыми входами пороговых элементов, а другой выход - с входом блока формирования сигнала оповещения и с одним входом блока временной задержки, другой вход которого связан с выходом датчика положения тела человека в пространстве, причем. первый вход эмёмента ИЛИ соединен с выходом блока выдержки вре- мени, а второй и третий входь.подключены к соотвествующйм выходам пороговых элементов, а выход соединен с другим входом передатчика. 2. Устройство по п. I, отличающееся тем, что датчик горизонтальных ударйых усилий содержит выполненйый в виде по- : лого цилиндра, заполйенного жидкостью, (П корпус, вмонтированный в йего пъезоэлемент и связанную с последяим и с корпус сом гибкими растяжками инерционную Mac су, размещенную в корпусе.Од isd О 00 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство регистрации положений частей тела | 1976 |
|
SU578061A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
