Известны динамические иоглотнтели колебаний, состоящие из груза, закренлеииого на упругом элементе, и автоматнческн иастра1Н5ающиеся и )езорганс с частотой подавляемых колебапин. Однако известные поглотнте.пт такого тииа ие обеспечивают настройки его в достаточно широком диапазоне изменений частот вынужденных ко.чебаиий.
Предлагаемый динамический поглотитель колебаний автоматически иастра1Н5ается на частоту возмущаюН1ей снль в широком диапазоне частот. Для достижения по первом 15ариапту динамического поглотителя колебаний (фиг. 1) на системе, ко,1ебания которой требуется поглотить, шарнирпо укреплен одним концом стержень /, второй конец которого уде|)живается двумя предварительно сжатыми пружинами 2. На стержне подвижно монтирован груз 3, который может передвигаться вдоль сте|)жня с помоптью ходового винта 4, приводимого через две червячные передачи 5 электромото1)ом 6. Одновременно на той же системе укреплен нуль-виброметр, предста1.тя1онип|: собой нлоскую пружину 7 с закреп.леипым па ней грузом (S. Жесткость пружины п велиЧ1ша груза подбирается таким образом, чтобы частота собственных колебаний нуль-вибратора лежала вне
диапазона возможных частот колебаний системы. Иа концах стержня / и нружнны 7 закреплены подвижные части контакторО15 9 и 10, последовательно включенных в цепь э.пектродвнгате.пя, согласно приведенной на фиг. 1 ылектрическо схеме.
При резонансе колебаний поглотителя с колебаниями системьг амп.тнтуды их невел1п 1, так как колебання эффективно ногашаются п контактор 9 не замыкается. Когда частота колебаний еистемы изменяется, амплитуды колебаний у1зетнчиваются и контактор 10 начинает замыкаться, причем, в зависимости от соотношения фаз колебаний поглотителя п нуль-виброметра, имеют место опреде.ченные сочетания одновременпо замыкае.мых контакторалп 9 и УОпар контакторов, обозначены римскими цифрами /-177/. В результате этого электродвигатель начинает вращаться в ту нли другую сторону, перемещая груз 3 в направлении восстановления резонанса.
На фиг. 2 показана конструкция динамического поглотителя по второму варианту. Как и в первом варианте, на системе, колебания которой требуется попчотить, шарнирно укреплен одним конном стержень /, jjTOpoft конец KOTopoio удерживается двумя предварительно сжатыми пружинами 2, причем на стержне У подвижно монтирован груз 3, который может передвигаться вдоль стержня механизма Л. Собачкн его приводятся рычагами J2 и J3, одни концы которых подпружинены. Против промежутка между двумя концамн рычагов 12 н J3 )асиоложен упор J4, качающийся на шарнире /5 н яв.тяю1цпйся концом углового рычага 16, второй конец которого соединен с KoiHtoM пружины 7 нуль-вибратора, устано1зле1Н ой на системе и несунсей груз 8.
При резоиапсс колебаний поглотителя и систсмь амплитуда их мала и свободные концы рычагов 12 и 13 упора 4 не касаются. При отклоне1Н- н частоты колебаний системы ог частоты колебаний поглотителя амп.- птудь колебаний системы начнут увеличиваться, вследствие чего нульвибратор также начнет колебаться. Тогда, ирн каждом движении груза 3 , в зависимости от соотношения фаз колебаиий 3 и 8, одни из рычагов 12 НЛП 13 поворачивается упором 14 на некоторый угол. Прн зтом собачка рычага 12 совершает рабоч1п ход при освобождении рычага действием пружины, а собачка рычага 13-при ударе его об упор. В pe3 v bTaTe винт перемещает груз 3 в паправлении восстановления резонанса.
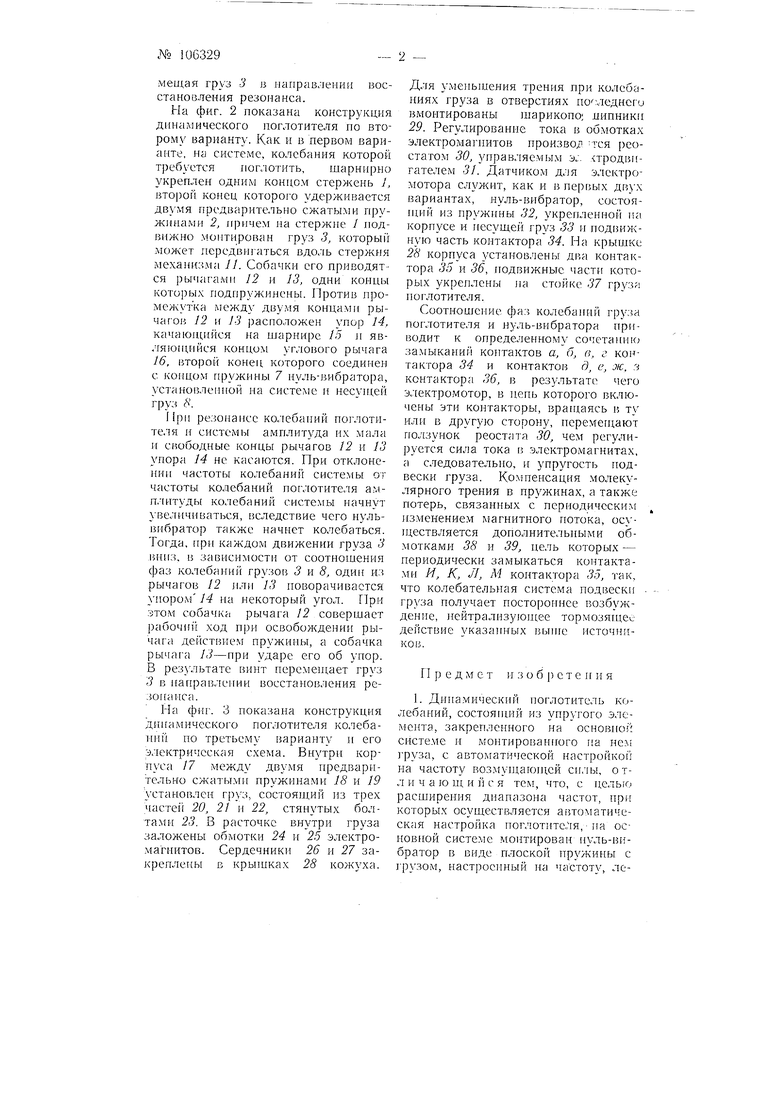
Па фиг. 3 показана конструкция д нгамнческого поглотителя колебаnini по третьему варианту н его электрическ;1я схема. Внутрн корпуса 17 между двумя предварительно сжатыми пружинами 18 и 19 установлен груз, состоящий из трех частей 20, 21 и 22, стянутых болтами 23. В расточке внутри груза заложены обмотки 24 н 25 электромагнитов. Сердечники 26 н 27 закреплены в крьннках 28 кожуха.
Для у.меньнгения трення при колебаниях груза в отверстиях по леднеги вмонтированы шарикопо; липникн 29. Регулирование тока в обмотках электромагнитов произвол тся реостатом 30, управляемым э. тродвнгателем 31. Датчиком для электромотора служит, как п в первых вариантах, нуль-внбратор, состоянии из пружинь 32, укреиленной па корпусе и песущей грзз 33 н нодвижную часть контактора 34. Па крышке 28 корпуса установлены два контактора 35 и 36, нодвижные ac. которых укреплены на стойке 37 груза поглотителя.
Соотношеиие фаз колебаиий груза поглотителя и нуль-вибратора npitводит к определенному сочетании; за.ыканин контактов а, 6, в, г контактора 34 и контактов д, е, ж, я контактора 36, в результате чего электромотор, в цепь которого включены эти контакторы, враи1аясь в ту или в другую сторону, перемещают ползунок реостата ЗО, чем регулируется сила тока к электромагнитах, а следовательно, и упругость подвески груза. Компенсация молекулярного трения в пружинах, а также потерь, связанных с пернодическим изменением магнитного потока, осундествляется донолнительиыми обмоткамн 38 н 39, цель которых - периодически замыкаться контактами И, К, Л, М контактора 3d, так , что колебательная система подвески груза нолучает постороннее г.озбуждение, нейтрализующее тормозящее действие указл1игьгх вьиис источников.
П р е д м е т и з обретен и я
1. Динамический иоглотитель колебаний, состояни-ni из унругого элемента, закрепленного на основной снстеме и монтированного на нем )руза, с автоматической настройкой на частоту воз.,ей силы, отл и ч а ю ш, и и с я тем, что, с целью расширения дианазона частот, нри которых осушествляется автоматическая настройка поглотителя, на основной системе моитирован нуль-вибратор в виде плоской пружины с j-рузом, настрое1П1ый на частоту, лежащую вне диапазона возможных колебаний основной системы и служащий, датчиком для изменения частоты адбствеиных колебаний ноглотителя, в зависимости от соотношения фандколебаний поглотителя и нуль-вр--ратора.
2.Динамический поглотитеоТь колебаний но п. 1, вынолненный в виде стержня, uecyHiero груз, отличающ и и с я тем, что, с целью изменения частоты собственных колебаний поглотителя, груз монтирован подвижным вдоль стержня с помсп|ыо ходового винта.
3.Динамический пог.1отитель колебаний но п. 2, о т л и ч а ю щ и йс я тем, что, с целью осуществления автоматического изменения частоты собственных колебаний поглотителя путем передвижения груза, ходовой винт приводится от электродвигателя, управляемого двумя контакторами, подвижные части которых укреплены на концах стержня и пружины нуль-виброметра соответственно.
4.Динамический поглотитель колебаний по п. 2, отличающийся тем, что, с целью осуществления автоматического изменения частоты собственных колебаний поглотителя путем передвижения груза за счет энергии, колебаний поглотителя, на конце ходового винта монтированы два храновых колеса противоположного вращения, собачки которых приводятся двумя рычагами, одни концы которых подпружинены, и против середины зазора между вторыми концами щарнирно монтирован упор, являющийся концом углового рычага, второй конец которого нрикреплен к свободному концу пружины нуль-вибратора.
5.Динамический поглотитель колебашп но н. 1, вынолненный в виде груза, монтированного на основной системе между двумя предварительно сжатыми пружинами, отлич а 10 HI и и с я тем, что, с целью автоматического изменения жесткости нодвескн груза поглотителя, в те.40 груза симметрично встроены два э.чектромагнита с сердечниками, укрепленными на корпусе и служащими одновременно нанравляющимп для колеблющегося груза, нричем обмотки электромагнитов питаются через реостат, ползунок которого нриводнтся от электродвигателя, управляемого двумя контакторами, подвижные частн которых укреплены на конце пружины нуль-виброметра и на грузе.
6.Форма выполнения динамического поглотнтеля колебаннй по п. 5, отличающаяся тем, что, с целью исключения влияния трения, электромагниты снабжены дополнительной обмоткой, питаемой через контактор, подвижная часть которого укреплена на грузе.
р||ф|ф т || ||||||
Li
t
---ЬчфЁч
№Г
.1 |«Ц |й
Л