2.Способ по п. 1, отличаю ц и и с я TGMf что горизонтальную скорость перемещения штанги относительно машины определяют путем измерения скорости изменения усилий в раскосах крепления штанг.
3,Устройство для осуществления способа по пп. 1 и 2, содержащее установленные шарнирно на стойке и раскосами подвешенные к продольной планке с возможностью вертикальных
дперзмещений штанги с распылителями,, подключенными к гидросистеме, и коштрессс, соединенный посредством влагоотделителя и регулятора давле;ния с воздушньв баллоном, о т л ич а .ю щ е е с я тем, что устрЪйство снабжено гидравлическими и пневма тическими датчиками усилий, гидравлическим дифференциаторе, сумнатором
и задатчиком расхгада, причем гидрав лические датчики установлены в раскосах и выполнены is виде замкнутых камер, гидравлически соединенных с сильфонгшй, подвижные элементы которых жестко связаны с поршнями гидравлических дифференциаторов, измерительные Д1ОЛОСТИ которых подключены к мембранны М камерам и кинематически связаны с шариковыми заслонками пневматических датчиков усилий, пневмопроводами соединенных с двумя 1Камерами сумматора, а пневмопроводами с входными дросселями и редуктором - с воздушным баллоном, причем третья камера с$ллматора соединена с задатчиком расхода, а четвертая посредством пневмоусйлителя с распылителями - с его междррссельными камерами.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания давления | 1979 |
|
SU717587A1 |
| Устройство для защиты гидротрансмисси | 1975 |
|
SU609849A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1971 |
|
SU308234A1 |
| Двухканальная система топливопитания и регулирования газотурбинного двигателя | 2019 |
|
RU2700989C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2344305C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2504677C1 |
| Устройство для дистанционного управления потоком текущей среды | 1982 |
|
SU1128858A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2338911C1 |
| Устройство для сортировки изделий | 1990 |
|
SU1708448A1 |
| АЭРОСТАТНАЯ СИСТЕМА ДЛЯ ВНЕСЕНИЯ ЖИДКИХ И ТВЕРДЫХ ВЕЩЕСТВ НА ПОВЕРХНОСТЬ ЗЕМЛИ | 2000 |
|
RU2186003C2 |
1. Способ внесения жидких удобрений штанговым опрыскивателем, включающий определение нормы внесения удобрений путем подбора диаметра выходного дросселя и скорости дви-г женин машины, отличающийс я тем, что, с целью повышения качества обработок путем уменьшения неравнбмерности внесения удобрений, |эпределяют горизонтальную скорость перемещения штанги относительно маши ны и с учетом ее значения и направления изменяют давление распыляемой жидкости. О)
Изобретение относится к сельскохозяйственному машиностроению, а именно к способам внесения жидких удобрений с псяующью широкозахватных высокопроизводительных ма1иин.
Известен способ внесения удобрений штанговым опрыскивателем, включакхвий определение нормал внесения удобрений путем подбора диаметра выходного дросселя и скорости движени машины. Штанги машины для внесения удобрений имеют значительную (до 15 м) длину, поэтсму они совершают относительно ;машины колебания со значительной амплитудой и скоростью С13..
Недостаток известного способа низкое качество выпол«вемых работ из-за большой неравномерности внесения удобрений.
Известно устройств.о 1цпя осуществ ления способа внесения жидких удобрений, содержшцее установленные шарнирно на стойке и раскосами подвешенные к продольной планке с возможностью вертикальных перемещений штанги с распылителями, подкяюченньими к гидросистеме, и компрессор соединенный посредством влагоотделителя и регулятора давления с воздушным баллоном :23.
У известного устройства при угловых колебаниях штанг значительно изменяются усилия в раскосах, с помощью которых штанга подвешена к продольной планке, по&тому наиболее подходящей информационной величиной являются усилия в раскосах, которые позволяют получить информацию об относительной скорости.штанги.
Цель изобретения - повышение качества обработок путем уменьшения неравномерности внесения удобрений
Поставленная Цель достигается тем, что согласно способу внесения жидких удобрений штангоььм опрыскивателем, определяют горизонтальную скорость перемещения штанги относительно машины и с учето ее значения и направления изменяют давление распыляемой жидкости.
Причем гс изонтальную скорость перемещения штанги относительно машины определяют путем измерения скорости изменения усилий в раскосах крепления штанг.
Устройство для осуществления способа внесения жидких удобрений, содержащее устаковленные шарнирно на стойке и раскосами подвешенные к продольнрй планке с возможностью вертикальных перемещений и танги с подключенньми к гидросистеме распылителями, и ксмтрессор соединенный посредством влагоотделителя н регулятора да вления с воздуш№1м баллоном, снабжено гидравлическими и пневматическими датчками. УСИЛИЙ, гидравлическим дифференциатором, cyiuBitaTopoM и задатчиком расхода, причем гидравлические датчики установлены в раскосах и выполнены в виде замкнутых камер, гидравлически соединенных с сильфонами, под;вижиые элементы которых жестко связаны с поршнями гидравлических дифференциаторов, измерительные ПОЛОСТ1Г которых подключены к мембранным кгшерам и кинематически связаны с шариковыми заслонками
пневматических датчиков усилий, пневмопроводами соединенных с- двумя камерами сумматора, а пневмопроводами а j;jco, дросселями и редуктором - с воздушным баллонсял, причем третья камера сумматора соединена с эадатчиком расхода, а четвертая посредством пневмоусилителя с распылителями - с его междроссельными.камергши.
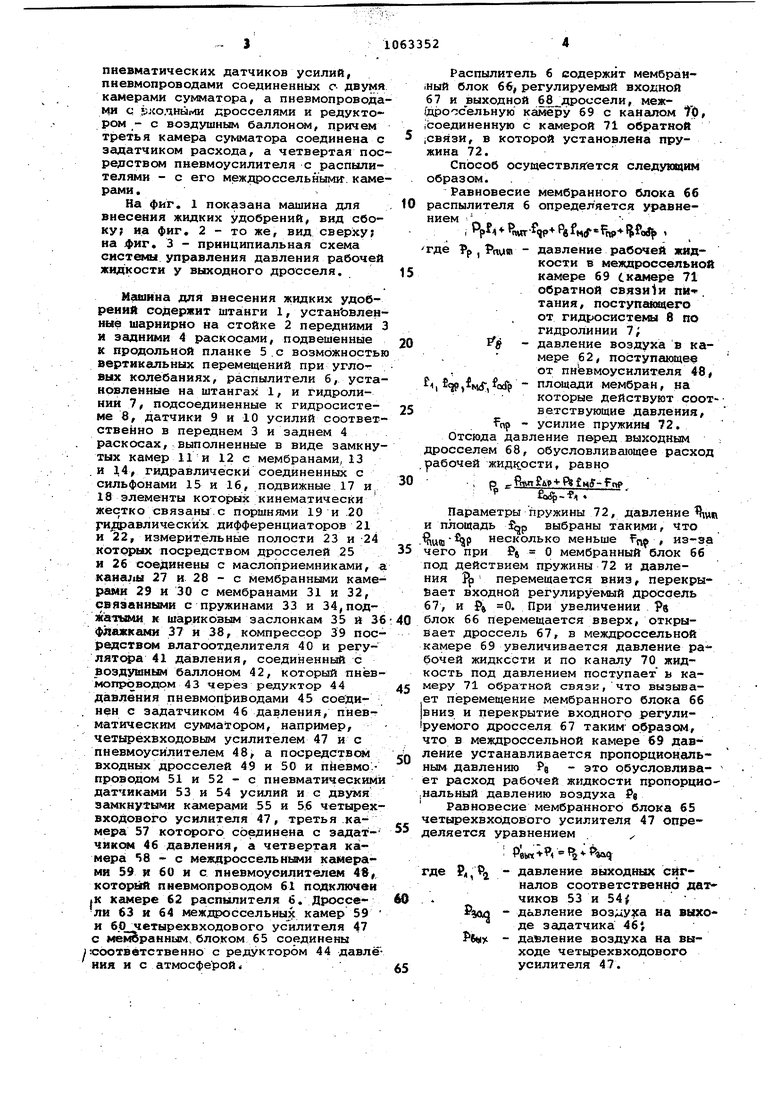
На фиг. 1 показана машина для внесения жидких удобрений, вид сбоку; на фиг, 2 - то же, вид сверху; на фиг, 3 - принципиальная схема системы управления давления рабочей жидкости у выходного дросселя.
Машина для внесения жидких удобреиий содержит штанги 1, устанЪвленные шарнирно на стойке 2 передними 3 и задними 4 раскосами, подвешенные к продольной планке 5.с возможностью вертикальных перемещений при угловых колебаниях, распылители 6, установленные на штангах 1, и гидролинии 7, подсоединенные к гидросистеме 8, датчики 9 и 10 усилий соответственно в переднем 3 и заднем 4 раскосах, выполненные в виде замкнутых камер 11 и 12 с мембранами, 13
.и 1,4, гидравлически соединенных с сильфонами 15 и 16, подвижные 17 и 18 элементы которых кинематически . жестко связаны с поршнями 19 и 20 )7и;5 авлических дифференциаторов 21 и 22, измерительные полости 23 и 24 котррых посредством дросселей 25 и 26 соединены с маслоприемниками, а каналы 27 и 28 - с мембранными камерами 29 и 30 с мембранами 31 и 32, свяэаннкми с пружинами 33 и 34,поджатыми к шариковым заслонкам 35 it 36: фДажками 37 и 38, компрессор 39 посредством влагоотделитёля 40 и регулятс а 41 давления, соединенный с Воздушным баллоном 42, который пневмопроводом 43 через редуктор 44 давления пневмоприводами 45 соеди- . нен с задатчиком 46 давления, пневт матическим сумматором, например/ четырехвходовым усилителем 47 и с пневмоусилителем 48, а посредством входных дросселей 49 и 50 и пйевмо проводом 51 и 52 - с пневматическими датчиками 53 и 54 усилий и с двумя замкнуФыми камерами 55 и 56 четырехвходового усилителя 47, третья камера 57 которого соединена с задатчиксм 46 давления, а четвертая камера )8 - с междроссельными камерами 59 и 60 и с пневмоусилителем 49, который пневмопроводом 61 подключен iK камере 62 распылителя 6. Дроссели 63 и 64 междроссельны камер 59 и 60 четырехвходового усЪлителя 47 с меййранным, блоком 65 соединены
соответственно с редуктором 44 давления и с атмосферой« ,
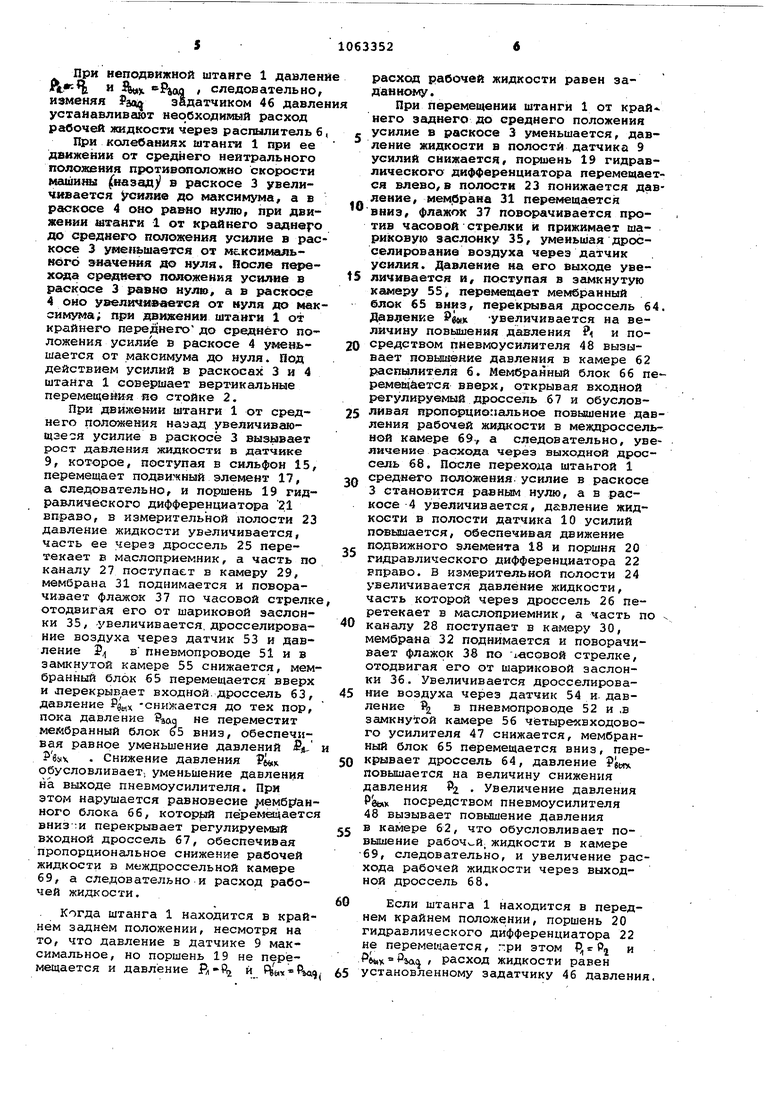
Распылитель 6 содержит мембраи;ный блок 66, регулируемый входной 67 и выходной 68 дроссели, меж(дрог:сельную камеру 69 с каналом ТО, .соединенную с камерой 71 обратной 5 (СВЯЗИ, в которой установлена пружина 72.
Способ осуцествляется следуихщш образом. .
Равновесие мембранного блока 66 0 распылителя 6 определяется уравнением.Ppfi Prwr-VPeWfw- Hif
где р , Pnvim - давление рабочей жидкости в междроссельной
5 камере 69 (.камере 71 обратной связи1и пи, тания, поступавшего от гидросистемы 8 по гидролинии 7;
ё давление воздуха в ка0мере 6 2, поступающее . от пневмоусилителя 48, fi, %,,Qcfp площади мембран, на
которые действуют соот5ветствующие давления, пр - усилие пружины 72. Отсюда давление перед выходньм дросселем 68, обусловливающее расход .рабочей жидкости, равно
0 .; р giNn Ai - -t Niy-fn{
Р fixSp--fl .
Параметры пружины 72, давление «п и площадь jp выбраны такими, что / «ffl P несколько меньше из-за
5 чего при PJ О мембранный блок 66 под действием пружины 72 и давления Рр перемещается вниз, перекрывает входной регулируемый дроссель 67, и Р 0. При увеличении Ре
0 блок 66 перемещается вверх, открывает дроссель 67, в междроссельной камере 69 увеличивается давление ра- бочей жидкости и по каналу 70 жидкость под давлением поступает в ка5 меру 71 обратной овязк,что вызывает перемещение мембранного блока 66 вниз и перекрытие входного регули|руемого дросселя 67 таким образом, что в междроссельной камере 69 давление устанавливается пропорциональ0ным давлению Pg - это обусловливает расход рабочей жидкости пропорцио;Нальный давлению воздуха Pg Равновесие мембранного блока 65 четырехвходового усилителя 47 опре5деляется уравнением .
где Рд, - давление выходных сигналов соответственно датчиков 53 и 54f
0 здо - Давление возмУХа на выходе задатчика 46} Ptvf. - давление воздуха На выходе четырехвходового еусилителя 47. При неподвижной штанге 1 давлен ft.% и ftjmt «spjj a , следовательно, изменяя РЭЦА задатчиком 46 давле устанавливают необходимый расход рабочей жидкости через распылитель 6 При колебаниях штанги 1 при ее д&ижейии от среднего нейтрального положения протиасшоложно скорости маши1ш назадУ в раскосе 3 увеличивается $гсилие до максимума, а в ргюкосе 4 оно равно нулю, при движении штанги 1 от крайнего заднего до среднего положения усилие в рас косе 3 уме|{ьшается от мексимадьногб э начения до нуля. После перехода среднего положения усилие в раскосе 3 равно нулю, а в раскосе 4 оно у8елич 1 а втсй от нуля ко мак при движении штанги 1 от крайнего переднего до среднего положения усилие в раскосе 4 уменьшается от максимума до нуля. Под действием усилий в раскосах 3 и 4 штанга 1 совершает вертикальные перемещейия но стойке 2. При движении штанги 1 от среднего положения наэад увеличивающзе я усилие в раскосе 3 вызывает рост давления жидкости в датчике 9, которое, поступая в сильфон 15, перемещает подвижный элемент 17, а следовательно, и поршень 19 гидравлического дифференциатора 21 вправо, в измерительной полости 23 давление жидкости увеличивается, Часть ее через дроссель 25 перетекает в маслоприемник, а часть по каналу 27 поступает в камеру 29, мембрана 31 поднимается и поворачивает флажок 37 по часовой стрелк отодвигая его от шариковой заслонки 35, увеличивается, дросселирование воздуха через датчик 53 и давление в пневмопроводе 51 и в замкнутой камере 55 снижается, мем бранный блок 65 перемещается вверх и лерекрьшает входной, дроссель 63, давление снижается до тех пор, пока давление не переместит мембранный блок б5 вниз, обеспечивая равное уменьшение давлений S, Рвыч . Снижение давления Pt обусловливает; уменьшение давления на выходе пневмоусилителя. При этом нарушается равновесие 1емб| ан ного блока 66, котор лй перемещаетс вниз ;и перекрывает регулируемый входной дроссель 67, обеспечивая пропорциональное снижение рабочей жидкости в междроссельной камере 69, а следовательно и расход рабочей жидкости. Когда штанга 1 находится в край нем заднем положении, несмотря на то, что давление в датчике 9 максимальное, но поршень 19 не перемещается и давление В-Я и ьх расход рабочей жидкости равен заданному. При перемещении штанги 1 от крайнего заднего до среднего положения усилие в раскосе 3 уменьшается, давление жидкости в полости датчика 9 усилий снижается, поршень 19 гидравлического дифференциатора перемещается влево,в полости 23 понижается давление, мембрана 31 перемещается вниз, флажок 37 поворачивается против часовой стрелки и прижимает шариковую заслонку 35, уменьшая дросселирование воздуха через датчик усилия. Давление на его выходе увеличивается и, поступая в замкнутую камеру 55, перемещает мембранный блок 65 вниз, перекрывая дроссель 64. Давление 9 -увеличивается на величину повышения давления i и посредством пневмоусилителя 48 вызывает повыошние давления в камере 62 распылителя 6. Мембранный блок 66 перемещается вверх, открывая входной регулируемый дроссель 67 и обусловливая иропорциопалькое повышение давления рабочей жидкости в междроссельной камере 69, а следовательно, увеличение расхода через выходной дрскзсель 68. После перехода штаьгой 1 среднего положения, усилие в раскосе 3 становится равным нулю, а в раскосе 4 увеличивается, давление жидкости в полости датчика 10 усилий повышается, обеспечивая движение подвижного элемента 18 и поршня 20 гидравлического дифференциатора 22 вправо. В измерительной полости 24 увеличивается давление жидкости, часть которой через дроссель 26 перетекает в маслоприемник, а часть по каналу 28 поступает в камеру 30, мембрана 32 поднимается и поворачивает флажок 38 по часовой стрелке, отодвигая его от шариковой заслонки 36. Увеличивается дросселирование воздуха через датчик 54 и давление Pjj в пневмопроводе 52 и ,в замкнутой камере 56 чётыре«входового усилителя 47 снижается, мембранный блок 65 перемещается вниз, перекрывает дроссель 64, давление tw. повышается на величину снижения давления Й . Увеличение давления Рвык посредством пневмоусилителя 48 вызывает повышение давления в камере 62, что обусловливает повышение рабочей, жидкости в камере 69, следовательно, и увеличение расхода рабочей жидкости через выходной дроссель 68. Если штанга 1 находится в переднем крайнем положении, поршень 20 гидравлического дифференциатора 22 не перемещается, ри этом и г расход жидкости равен установленному задатчику 46 давления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шамаев Г.П., Шеруда С.Д | |||
| Механизм для защиты сельскохозяйственных культур от вредителей и болезней | |||
| М., Колос, 1978, с | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Методические указания по изучению конструкции и регулировок машин для внесения жидких удобрений. | |||
| Мииск БИМСХ, 1980, с,43-52. | |||
