0 г8 mi 2,Линия no п. 1, отличающая с я тем, что величины перемещения захватных устройств равны между собой. 3.Ливдя по пп. 1 и 2, о т л и ч а ю щ а я с я тем, что величина позиционного перемещения пильного аппарата меньще величины перемещения одного из захватных устройств. 4. Линия по п. 1, о т п и ч а ю щ а яс я тем, что величина позиционного перемещения пильного аппарата меньще величины перемещения захватного устройства с меньшей величиной перемещения.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2027346C1 |
| УСТАНОВКА РАСКРЯЖЕВОЧНАЯ МНОГОПИЛЬНАЯ | 2004 |
|
RU2255855C1 |
| Агрегат для обработки лесоматериалов | 1980 |
|
SU933461A1 |
| МЕХАНИЗИРОВАННАЯ СИСТЕМА ДЛЯ РАСКРОЯ ДРЕВЕСНЫХ СТВОЛОВ /ВАРИАНТЫ/ | 2008 |
|
RU2400353C2 |
| Лесозаготовительная машина | 1988 |
|
SU1713804A1 |
| УСТАНОВКА РАСКРЯЖЕВОЧНАЯ МНОГОПИЛЬНАЯ | 2006 |
|
RU2312009C1 |
| Сучкорезно-раскряжевочная машина | 1986 |
|
SU1440714A1 |
| ПРОТАСКИВАЮЩЕЕ УСТРОЙСТВО ДЕРЕВООБРАБАТЫВАЮЩЕЙ МАШИНЫ | 1992 |
|
RU2080251C1 |
| УСТАНОВКА РАСКРЯЖЕВОЧНАЯ МНОГОПИЛЬНАЯ | 2007 |
|
RU2331509C1 |
| Лесозаготовительная машина | 1983 |
|
SU1132857A1 |
1. ЛИНИЯ ДЛЯ ОБРАБОТКИ ЛЕСОМАТЕРИАЛОВ, включающая основание, на котором размещены устройство для подачи лесоматериалов, устройство для приема обработанных лесоматериалов и установленный между ними агрегат для обработки лесоматериалов, содержащий смонтированную на основании раму с поворотной относительно нее балкой с сучкорезной головкой, соосно устан.овленными захватными устройствами, одно из которых имеет привод перемещения вдоль балки по ее направляющим, и пильным аппаратом, отличающаяся тем, что, с целью расширения технологических возможностей и повыщения производительности, рама установлена на основании с возможностью поворота в горизонтальной и вертикальной плоскостях и снабжена приводом ее поворота, при этом второе захватное устройство снабжено приводом его перемещения по направляющим балки, а пильный аппарат снабжен приводом его позиционного перемещения вдоль балки, причем направляющие, в которых установлен пильный аппарат, расположены (Л параллельно направляющим, по которым перемещаются захватные устройства. С
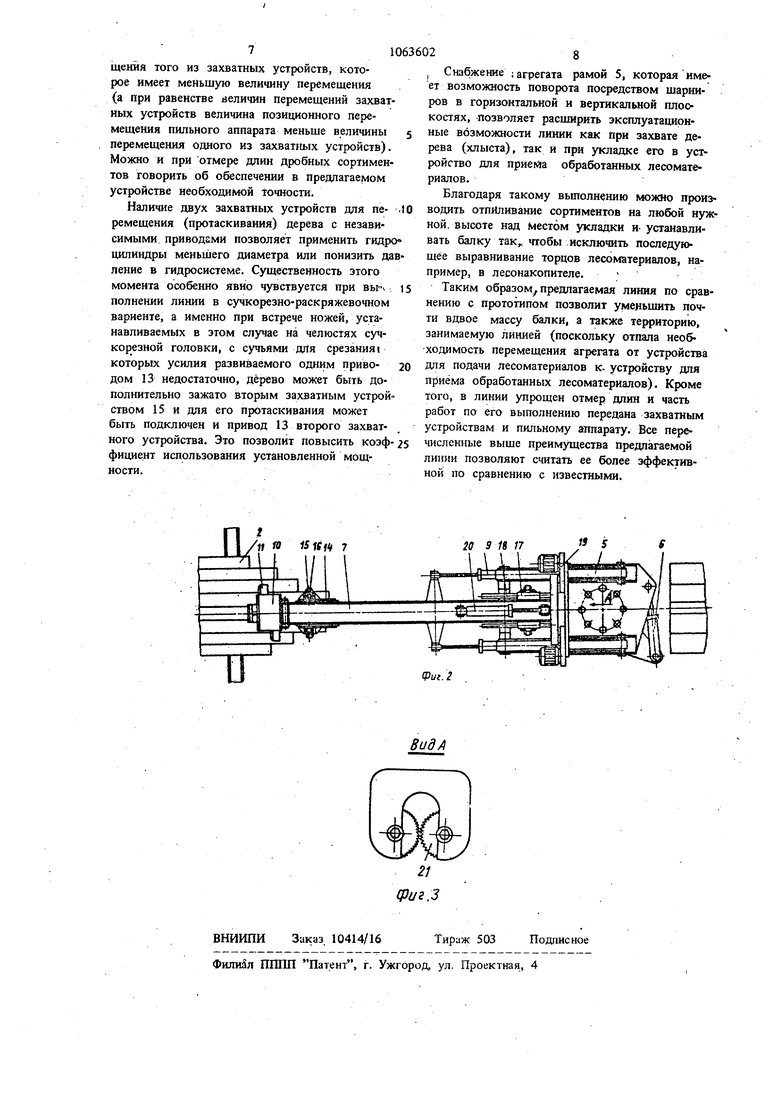
Изобретение относится к линиям для обработки лесоматериалов и может быть использовано в лесной и деревообрабатывающей промышленности. Известно протаскивающее устройство сучкорезной машины, включающее подвижно ус.тановленную на направляющих тележку, на которой установлены поворотные рычаги с зажимньпуш элементами, управляемые ветвями тягового органа рабочего и холостого хода те лежки 1. . . Недостатком известного устройства является отсутствие раскряжевки. Известна также линия для обработки лесоматериалов, включающая основание, на котором размещены устройство для подачи лесоматериалов, устройство для приема о6работ§нных лесоматериалов и установленный между ними агрегат для обработки лесоматериалов, содержащий смонтированную на основании раму с поворотной относительно нее балки с сучкорезной головкой, соосно установленными захватными устройствами, одно из которых имеет привод перемещения вдоль балки по ее направляющим, и пильным аппаратом 2. Однако для нормальной работы линии необходимо уложить в запас лесоматериалы, подлежащие обработке строго параллельно оси направляющих, в которых имеет возможность перемещаться агрегат. При выборе дерева необ ходимо 1еремеща1ъ весь агрегат,имеющий весьма значительную массу. Установка в данной Л1ШИИ балки агрегата, подвешенной в центре на неподвижной раме, обуславливает неудобство как при захвате и продольной подаче лесо материалов, так и при их укладке в устройство для приема обработанных лесоматериалов например, в лесонакопитель или на транспортер. Последнее объясняется наличием лишь одной степени свободы балки в вертикальной плоскости.Балку очень трудно установить при захвате лесоматериала по линии, обеспечивающей минимальные знергозатраты на последующ е перемещение лесоматериала вдоль балки, при ук:ладке же в устройство для приема обработанных лесоматериалов падают со значительной высоты одним концом вниз и после попадания в устройство для приема теряют нужную ориентацию. Указанные недостатки объясняются в основном малыми функциональными возможностями известной линии. . Кроме того, линия обладает невысо1сой производительностью, что объясняется, например, необходимостью непроизводительных потерь времени на возврат механизма продольного перемещения с захватом в исходное положение. Кроме того, для линии требуется достаточно сложное устройство отмера длин сортиментов. При выполнении ее в сучкорезнораскряжевочном вариенте требуется для надежной обработки деревьев с различной толщиной сучьев привод значительной мощности, хотя коэффициент использования зтой мощности в процессе работы ожидается невысокий. Цель изобретения - расширение технологических возможностей и повышение производительности линии. Указанная цель достигается тем, что рама установлена на основании с возможностью поворота в горизонтальной и вертикальной плоскостях и снабжена приводом ее поворота, при этом второе захватное устройство снабжено приводом его перемещения по направляющим балки, а пильный аппарат снабжен приводом его позиционного перемещения вдоль балки, причем направляющие, в которых установлен пильный аппарат, расположены параллельно направляющим, по которым перемещаются захватные устройства. При этом величины перемещений захватных устройств равны между собой. Кроме того, величина позиционного перемец ения пильного аппарата меньше величины перемещения одного из захватных устройств. При этом величина позиционного перемещения пильного аппарата меньше величины перемещения захватного устройства с меньшей веливдной перемещения. На фиг. 1 изображена предлагаемая линия, вид спереди; на фиг. 2 - то -же, вид сверху; на фиг. 3 - вид А на фиг. 2. Линия для обработки лесоматериалов включает основание 1, на котором располагаются устройство 2 для подачи лесоматериалов, устройство 3 для приема обработанных лесоматериалов и агрегат для обработки лесоматериалов. Агрегат включает смонтированную на основании 4 раму 5, установленную с возможностью поворота в горизонтальной и вертикаль ной плоскостях. Для поворота рамы 5 в горизонтальной плоскости служит привод 6, .например гидроцилиндр. Конструкция рамы 5 i позволяет обрабатывать максимальный диаметр ствола дерева. К раме 5 щарнирно прикреплена балка 7. Для поворота рамы 5 в вертикал ной плоскости слу-жит привод 8, например тнц роцилиндр, а для взаимного поворота рамы 5 и балки 7 служит привод 9, например гидроцилиндр. На конце балки 7 установлена сучкорезная головка 10, содержащая зажимные рычаги ,11, поворотные посредством привода, например гидроцилиндра (не показан). В зависимости от варианта исполнения агрегата для обработки лесоматериалов, рычаги 11 могут быть снабжены ножами для обрезки сучьев (в сучкорезно-раскряжевочном варианте) или последние могут отсутствовать (в раскряжевочном варианте) . В нижней части балки 7 установлены направляющие 12, по которым с помощью приводов 13, например гидроцилиндров могут перемещаться, например, каретки 14 с соосными между собой и сучкорезной головкой 10, захватными устройствами 15. Для разведения челюстей этих устройств и надежного зажима дерева служат приводы 16, например гидроцилиндры. На балке 7, например, в направляющих 17 с помощью щтанг 18 установлен пильный аппарат 19, снабженный приводом 20 позиционного перемещения вдоль балки, например гидроцилиндром (не показано). Это устройство может быть выполнено любым известным образом. Оно может, например, включать систе|му управляемых выдвижных упоров. Либо оно включает, например, зубчатую рейку, выполненную, например, на нггангах 18. Длина .зубчатой части этой рейки должна соответствовать величине максимального позиционного и необходимого перемещения пильного аппарата 19. Эта величина может быть меньше величины перемещения того из приводов 13, который имеет меньшую величину хода (т.е. величины перемещения захватного устройства с меньшей величиной перемещения). Величины 1 24 ходов приводов 13 (т.е. величины перемещений захватных устройств) могут быть и равными между собой. В этом случае величина позиционного перемещения пильного аппарата может быть меньще величины хода одного из приводов 13 (т.е. величины перемещения одного из захватных устройств). Наряду с зубчатой рейкой, устройство позиционного останова включает элемент, находящийся в зацеплении с рейкой, например зубчатое колесо, связанное, например,, с датчиком импульсов, выдающим в блок сравнения информацию о количестве прощедших зацепление зубьев. Блок сравнения, осуществляют сравнение информации (в виде импульсов), поступившей сгт указанного датчика с инфорь мацией, поданной в этот блок ранее от блока программного управления, который в свою очередь может работать либо по заранее установленной программе, либо по заказу оператора. Из блока прюграммного управления поступает информация в импульсах, соответствующая необходимой величине перемещения аппарата 19. В тот момент, когда количество импульсов, поступающих от датчика, будет разно количеству импульсов, поступившим от блока программного управления, блок сравнения выдаст команду на исполнительные элементы останова (они общеизвестны и на чертежах не показаны) привода 20. Пильный аппарат 19 включает дисковые пилы 21 с приводом их вращения (не показан) и приводом их надвигания, например гидроцилиндром 22). Следует отметить, что ,. устройство для приема обработанных лесоматериалов 3 может представлять собой как лесонакопитель (лесонакопители) любой пригодной конструкции, так и может быть вы полнено, например, в виде сортировочного транспорта и т.п. На чертежах не показаны также устройства для уборки с чьев, опилок, откомлевок. Для этой цели могут быть использованы любые известные средства, такие, например, как ленточные или скребковые транспортеры, машинь1 для уборки мусора, погрузчики и т.п. Устройство работает следующим образом. Пачку деревьев (хлыстов) укладывают в устройство 2 для подачи лесоматериалов любым известным способом. В исходном положении открыты сучкорезная головка 10 и захватные устройства 15, причем последние находятся по краям балки в крайних положениях. Оператор с помощью приводов 6, 8 и 9 ориентирует балку 7 таким образом, что открытая сучкорезная головка 10 и ближайшее к ней захватное устройство 15 своим зевом ложатся на дерево, затем посредством соответствующих приводов сводятся захватные рычаги И сучкорезной головки 10 и челюсти эахзатных устройств 15. При этом в случае сучкорезно-раскряжевочного варианта сучкорезные ножи сводятся на необходимую для обрезки сучьев величину, а в случае раскряже вочного варианта, захватные рычаги сводят на величину, непрепятствующую перемещению между ними хлыста. При этом линии действия захватных устройств находятся в плоскости, приблизительно параллельной с осью дерева (хлыста), а балка 7 располагается по отношению к дереву (хлысту), по линии, обеспечива ощёй минимальные энергозатраты на последующее протаскивание (перемещение) дерева (хлыста). Затем оператор включает приводы 13. Начинается процесс протаскивания (перемещения) дерева (хльюга) ближайщим к сучкорезной головке 10 приводом 13 захватного устройства 15, а второе захватное устройство 15 своим приводом 13 перемещается , с раскрытыми челюстями навстречу первому. Далее осуществляется передача дерева (хлыста) второму захватному устрюйству 15 (положение устройств 15 в этот момент обозначено пунктиром). Для этого необходимо, чтобы комель дерева (хлыста) в момент передачи выходил за пределы первого захватного устройства 15 на величину, необходимую для его захвата вторым захватным устройством 15. Это обеспечивается либо зажимом дерева (хлыста) в начале работы на нуЖ ном расстоянии от комля первым захватным устройством 15 (если позволяет бессучкойая зона), либо дополнительным перехватом первым захватным устройством (с использованием сучкорезной головки 10). После зажима комля дерева (хлыста) вторым захватным уст ройством 15 дерево (хлыст) протаскивается с помощью этого устройства, а первое захватное устройство 15 возвращается при этом а г исходное положение. При перемещении (протаскивании) дерева (хлыста) пильный аппарат 19 находится в крайнем (левом) положении. После того как ствол дерева выдвинут на определенную величину за плоскость действия режущих органов пильного аппарата производят откомлевку. Да лее осуществляется процедура отмера длин сортиментов с последующей раскряжевкой. Ли ния предусматривает выполнение больщого объема работ по отмеру длин сортиментов дп последующей раскряжевки теми же захватными .устройствар,1И. С этой целью величины ходов приводов 13 (т.е. величины перемещений захватных устройств) выбираются такими, чтобы длины выпиливаемых сортиментов (чаще; всего недробных сортиментов) можно получат суммой необходимого количества шагов этих устройств. Например, величины ходов приводов (например, гидродилиндров) 13 могут быть равными I м. При выпиливании сортиментов некратных целому числу метров/ (дробных) по команде оператора или автоматим чески от блока программного управления раскроем одновременно с началом отмера длин включается привод 20 позиционного перемещения. Одновременно с отмером длины: сортимента (и соответствующим перемещением лесоматериала) оператор переводит агрегат посредством 8 и 9 (а при необходимо.сти и приводом 6) в положение удобное для укладки в устройство для приема обработанных лесоматериалов 3 (например, лесонакопитель). Это положение показано пунктиром на фиг. 1. При укладке устройства для приема обработанных материалов 3 важно обеспечить примерное равенство уровней торцов сортиментов. С этой целью перемещение балки 7 приводами 8 и 9 осуществляется с учетом перемещения пильного аппарата приводом 20, т.е. делается необходимая поправка в положение балки 7, учитывающая это перемещение. После ОТПШ10ВКИ очередного сортимента над местом его укладки (на минимально возможной высоте над эТим местом в горизонталг ном положении) цикл отмера, перемещения и раскряжевки с укладкой повторяется. И так до полной разделки ствола дерева (хлыста) на сортименты. После этого цикл повторяется. Таким образом, предлагаемая конструкция позволяет сделать процесс обработки лесоматериалов практически непрерывным. Этому способствует и наличие двух захватных устройств и то, что величинам их перемещений кратны длины сортиментов. Важным в этом плане является и возможности подготовки положения балки для укладки одновременно с отмером длины и перемещением для этого лесоматериала, а также то, что продольное перемещение пильного аппарата может быть совмещено во времени с продольным перемещением дерева (хлыста). При использовании линии может быть достиг нута достаточно высокая точность отмера длин сортимента, так как приводы захватных устройств, например гидроцилиндры, перемещаются от упора до упора. При отмере длин )бных сортиментов перемещают пильный аппарат приводом 20 позиционного перемещения. Но учитывая то, что пильный аппарат имеет постоянную массу, перемещение его может быть начато с началом передвижения первого захватного устройства и осуществлено с малой скоростью, а также то, что величина максимального позиционного перемещения пильного аппарата обы1шо меньше величины перемещения того из захватных устройств, которое имеет меньшую величину перемещения (а при равенстве величин перемещений захватных устройств величина позиционного перемещения пильного аппарата меньше величины перемещения одного из захватных устройств). Можно и при отмере длин дробных сортиментон говорить об обеспечении в предлагаемом устройстве необходимой 1очносш. Налиме „ух х..™х у„ройс,. , „.. иещения ГпоотаскиванияЧ ПРПРПЭ л ,.„: ремещения (протаскивания) дерева с незави симыми приводами позволяет применить гидро цилиндры меньшего диаметра или понизить да ление в гидросистеме. Существенность этого момента особенно явно чувствуется при вы полнении линии в сучкорезно-раскряжевочном вариенте, а именно при встрече ножей, устанавливаемых в этом случае на челюстях сучкорезной головки, с сучьями для срезания которых усилия развиваемого одним приводом 13 недостаточно, дерево может быть дополнительно зажато вторым захватным устройством 15 и для его протаскивания может быть подключен и привод 13 второго захватного устройства. Это позволит повысить козффициент использования установленной мощности. 1 02g Снабжение i агрегата рамой 5, которая имеет возможность поворота посредством шарниров в горизонтальной и вертикальной плоскостях, позволяет расширить эксплуатационные возможности линии как при захвате дерева (хлыста), так и при укладке его в устройство для приема обработанных лесоматериалов. Благодаря такому вьтолнению можно произ-о Г . .,„.--. . f «мспиш на люоои нужной, высоте над местбм укладки и- устанавливать балку так, чтобы исключить последуюшее выравнивание торцов лесоматериалов, например, в лесонакопителе. Таким образом, предлагаемая линия по сравнению с прототипом позволит уменьшить почти вдвое массу балки, а также территорию, занимаемую линией (поскольку отпала необходимость перемещения агрегата от устройства для подачи лесоматериалов к. устройству для приема обработанных лесоматериалов). Кроме того, в линии упрощен отмер длин и часть работ по его выполнению передана захватным устройствам и пильному аппарату. Все перечисленные выше преимущества предлагаемой инии позволяют считать ее более эффективой по сравнению с известными.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Протаскивающее устройство сучкорезной машины | 1976 |
|
SU596440A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2990309, 03,10.80 (прототип). | |||
