72 / 77
7 8 га 2
4 4 О
4:;
Cpusj
Изобретение относится к лесной промышленности и может быть использовано для первичной обработки лесоматериалов.
Цель изобретения - повышение точности отмера длин лесоматериалов.
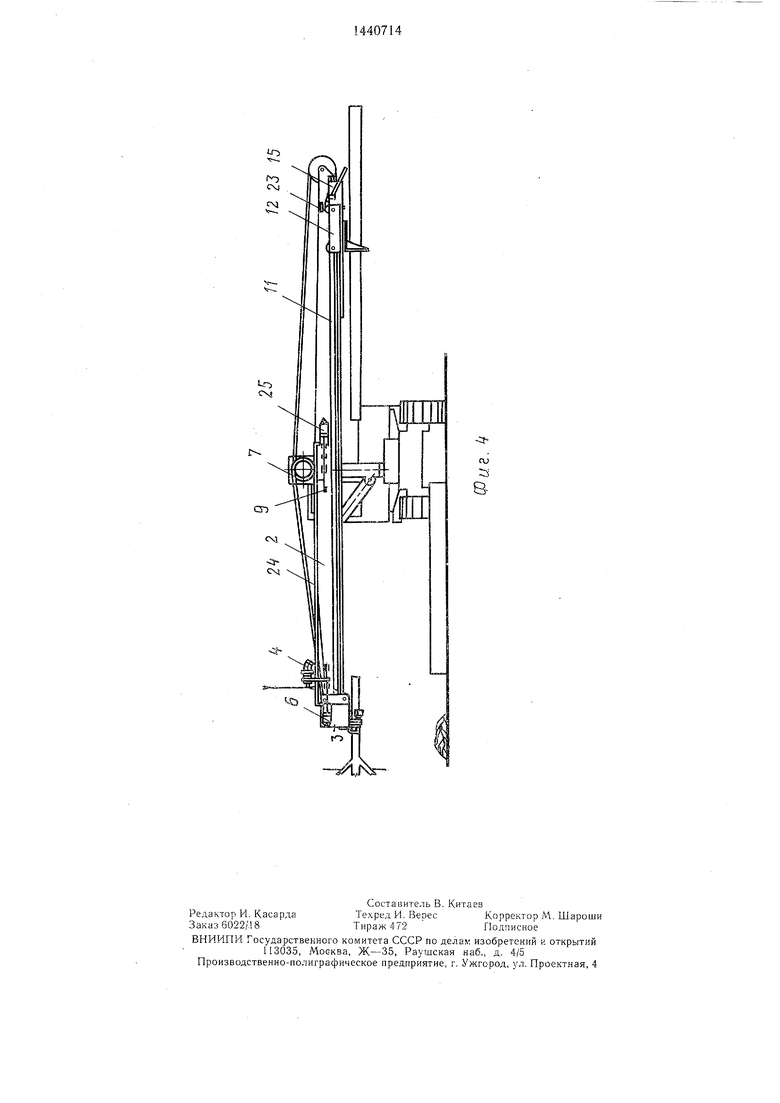
На фиг. 1 изображена машина в момент захвата ствола обрабатываемого дерева; на фиг. 2 - то же, в момент окончания отмера длины и отделения сортимента; на фиг. 3 - часть балки машины в момент транспортирования сортимента; на фиг. 4 - машина перед сброской транспортируемого сортимента и с вторым вариантом корректирующего механизма.
Машина содержит самоходное шасси 1 с поворотной балкой 2, на одном конце которой установлены захватно-сучкорезная головка 3 и режуший орган (раскряжевочное устройство) 4. Последнее смонтировано в продольных направляюших 5 и соединено со штоком гидроцилиндра 6, а также со штангой 7, которая подвижно закреплена во втулках 8 и на которой закреплены датчики 9 .и 10 положения, например путевые выключатели.
Количество датчиков 9 и 10 равно количеству отмеряемых длин. Датчики 9 и 10 могут переставляться вдоль штанги 7 при переналадке машины на другие длины сортиментов. Протаскиваюший механизм содержит направляющие И, в которых установлена каретка 12 с захватами 13. Последняя посредством тяги (тяг) 14 изменяемой длины соединена с дополнительной кареткой 15, на которой смонтированы упор 16 и элемент 17 для взаи.модействия с датчиками 9 и 10.
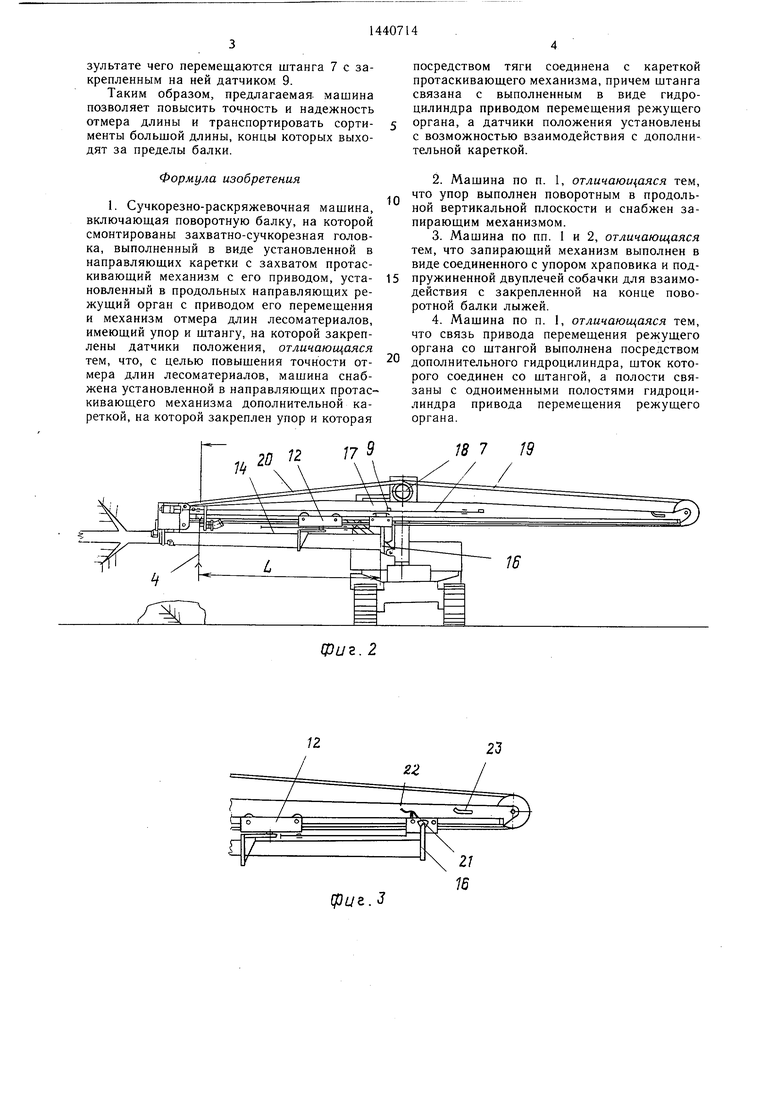
Лебедка 18 через гибкие тяговые ор га- ны 19 и 20 соединена с кареткой 12 (фиг. 2). Упор 16 может быть выполнен поворотным (фиг. 4). В этом случае упор 16 снабжен храповиком 21. На дополнительной каретке 15 поворотно смонтирована подпружиненная собачка 22, которая при запертом упоре взаимодействует с храповиком 21, а при освобожденном - с лыжней 23, смонтированной на конце балки 2.
На фиг. 4 изображен второй вариант соединения раскряжевочного устройства 4 со штангой 7. Штоковая полость гидроцилиндра с трубопроводом 24 соединена со штоковой полостью гидроцилиндра 25, который соединен со штангой 7 (условно на ней показан датчик 9). Вариант позволяет менять уровни взаимодействующих узлов, укоротить штангу 7 и изменять направление корректировки. Каретки 12 и 15 с набжены притормаживающими элементами (не показаны) для исключения самопроизвольного их перемещения относительно направляющих 11 балки 2.
Сучкорезно-раскряжевочная машина работает следуюшим образом.
Наклоном балки 2 захватно-сучкорезная голвка 3 наводится на лежащее дерево или хлыст и захватывает его (фиг. 1). Вклю5
5
чением лебедки 18 посредством гибкого тягового органа 20 каретка 12 с раскрытыми захватами 13 перемешается в сторону дерева. При этом дополнительная каретка 15 с упором 16 посредством тяги 14 изменяемой длины, соединенной с кареткой 12, также перемещается в сторону дерева.
Затем захваты 13 закрывают и лебедкой 18 через тяговый орган 19 перемещают каретку 12 в сторону свободного конца бал- 0 ки 2. Когда комель дерева упирается в упор 16, начинает двигаться и дополнительная каретка 15 (фиг. 2). Когда элемент 17 доходит до датчика 9. происходят выключение лебедки 18 и остановка кареток 12 и 15. При этом расстояние между упором 16 и раскряжевочным устройством 4 будет на величину тормозного пути А1 больше заданной длины.
При подаче рабочей гидрожидкости в поршневую полость гидроцилиндра 6 начинает вь1двигаться его шток. При этом дат- 0 чик 9 идет вдоль штанги 7 и, дойдя до элемента 17, выключает распределитель гидроцилиндра 6. При этом раскряжевочное устройство 4 смещается вправо на величину Д1, и расстояние между упором 16 и раскряжевочным устройством 4 равно заданной веичине L. Благодаря постоянной массе пилы и малой скорости ее перемещения, корректировка длины осуществляется с большой точностью.
После отделения сортимента он может быть либо сразу сброшен, либо перевезен в другой конец балки и сброшен там (фиг. 3 и 4). При этом с целью сброски сортимента как можно дальше, осуществляют перехват захватом, чтобы упор 16 оказался на максимальном расстоянии от каретки 12 (фиг. 3, элемент 17 не показан). При этом сортимент от опрокидывания удерживается захватами 13 и упором 16.
Когда каретка 15 подходит к концу балки 2, собачка 22, встретившись с лыжей 23, поворачивается против часовой 0 стрелки и освобождает упор 16, который под действием сортимента отклоняется и пропускает конец последнего за пределы балки 2. После остановки каретки 12 (фиг. 4) сорти- .мент сбрасывается, а операции обработки дерева повторяются, т. е. включением лебедки 18 каретка 12 идет в сторону захват- но-сучкорезной головки. Как только выбрана свободная длина тяги 14, начинает двигаться каретка 15. Собачка 22 поворачивается по часовой стрелке и фиксирует упор 16.
Работа корректирующего механизма (фиг. 4) аналогична работе корректирующего механизма изображенного на фиг. 1 и 2. При подаче гидрожидкости в поршневую полость гидроцилиндра 6 начинает дви- 5 гаться раскряжевочное устройство 4. Гидрожидкость из штоковой полости гидроцилиндра 6 по трубопроводу 24 поступает в штоковую полость гидроцилиндра 25, в ре0
5
5
0
зультате чего перемещаются штанга 7 с закрепленным на ней датчиком 9.
Таким образом, предлагаемая, машина позволяет повысить точность и надежность отмера длины и транспортировать сортименты большой длины, концы которых выходят за пределы балки.
Формула изобретения
1. Сучкорезно-раскряжевочная машина, включающая поворотную балку, на которой смонтированы захватно-сучкорезная головка, выполненный в виде установленной в направляющих каретки с захватом протаскивающий механизм с его приводом, установленный в продольных направляющих режущий орган с приводом его перемещения и механизм отмера длин лесоматериалов, имеющий упор и штангу, на которой закреплены датчики положения, отличающаяся тем, что, с целью повышения точности отмера длин лесоматериалов, машина снабжена установленной в направляющих протаскивающего механизма дополнительной кареткой, на которой закреплен упор и которая
0
посредством тяги соединена с кареткой протаскивающего механизма, причем штанга связана с выполненным в виде гидроцилиндра приводом перемещения режущего органа, а датчики положения установлены с возможностью взаимодействия с дополнительной кареткой.
2.Машина по п. 1, отличающаяся тем, что упор выполнен поворотным в продольной вертикальной плоскости и снабжен запирающим механизмом.
3.Мащина по пп. 1 и 2, отличаюш,аяся тем, что запирающий механизм выполнен в виде соединенного с упором храповика и под5 пружиненной двуплечей собачки для взаимодействия с закрепленной на конце поворотной балки лыжей.
4.Мащина по п. 1, отличающаяся тем, что связь привода перемещения режущего органа со щтангой выполнена посредством дополнительного гидроцилиндра, шток которого соединен со штангой, а полости связаны с одноименными полостями гидроцилиндра привода перемещения режущего органа.
0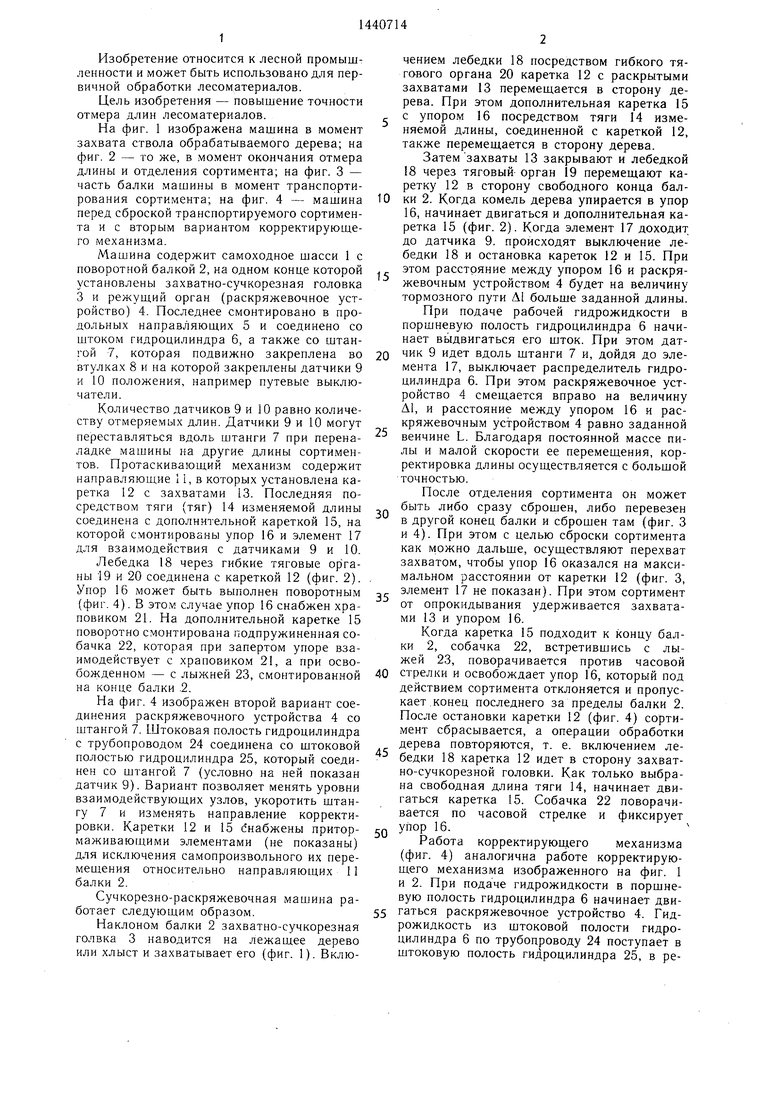
| название | год | авторы | номер документа |
|---|---|---|---|
| Лесозаготовительная машина | 1989 |
|
SU1692840A1 |
| Устройство для отмера длин сортиментов на раскряжевочных установках с продольной подачей | 1985 |
|
SU1299783A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1991 |
|
RU2027346C1 |
| Сучкорезно-раскряжевочная машина | 1988 |
|
SU1664555A1 |
| Устройство для отмера длин сортиментов | 1985 |
|
SU1445964A1 |
| Линия для обработки лесоматериалов | 1982 |
|
SU1063602A1 |
| Лесозаготовительная машина | 1991 |
|
SU1821095A1 |
| Лесозаготовительная машина | 1991 |
|
SU1801309A1 |
| Сучкорезно-раскряжевочное устройство | 1985 |
|
SU1291403A1 |
| Рабочий орган лесозаготовительной машины | 1988 |
|
SU1653957A1 |
Сучкорезно-раскряжевочная машина может быть использована для первичной обработки лесоматериалов. Цель изобретения - повышение точности отмера длин лесоматериалов. Машина содержит поворотную балку 2, на которой смонтированы зах- ватно-сучкорезная головка 3, режущий ор ган 4, установленный в продольных направляюших, гидроцилиндр 6 его перемеш,ения и выполненный в виде кареток 12 с захватом 13 протаскиваюш.ий механизм с приводом. Со штоком гидроцилиндра 6 соединена штанга 7 с датчиками 9 и 10 положения. В направляющих 11 каретки 12 установлена также дополнительная каретка 15 с поворотным упором 16, она связана с кареткой 12 посредством тяги 14. Дерево захватывается за комлевую часть головкой 3 и захватами 13. При протаскивании торец дерева через упор 16 перемещает каретку 15, имеюш,ую элементы 17 для взаимодействия с датчиками положения 9 и 10 на штанге 7. Сигналом с датчика, соответствующего заданной длине лесоматериала, отключается привод каретки 12. На величину тормозного пути режущий орган 4 перемещается гидроцилиндром 6, Повторным сигналом от соответствующего заданной длине датчика 9 (10) положения останавливается перемещение режущего органа 4. Производится отделение лесоматериала от дерева, который затем перемещается кареткой 12 вперед и сбрасывается. 3 з. п. ф-лы. 4 ил. (Л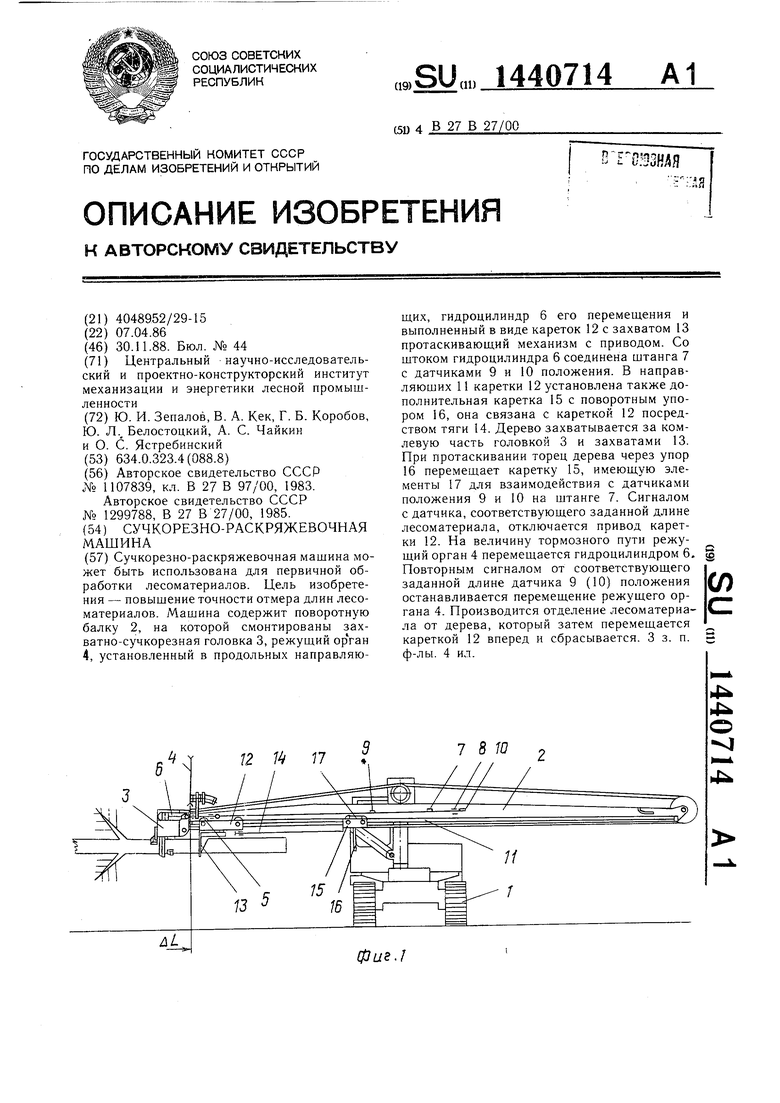
Фиг. 2
фиг.. 3
18 7 1д
10
cf
cu
a
в
| Способ раннего лечения стопы-"качалки" у детей | 1982 |
|
SU1107839A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Протаскивающее устройство сучкорезной машины | 1985 |
|
SU1299788A1 |
