Изобретение относится к вычислительной техйике, в частности к систе мам отображения графической информации, и может быть использовано в диалоговых устройствах отображения и в тренажерах при выводе информации из ЭВМ.
Известно устройство для формирования стереоскопических изображений, содержащее оптически связанные ист чники света, рассеиватель света, два светофильтра, меяоду 1соторыми расположены набор электрооптических пластин и интерференционное зеркало, оптически связанное через объектив с ЭЛТ, анализатор и коммутатор, подключенный к набору электрооптических пластин СП .
Недостатком устройства является невозможность вывода изображений, заданных поверхностями (такое уст- , ройство может воспроизводить только контурные изображения), а также сложность оптической системы. .
Наиболее близким по технической сущности к изображению является устройство для стереоскопической индикации, содержащее стереоскопический индикатор, соединенный с вычислителем, подключенный к блоку синхронизации, поляроидныёочки с ультразвуковым излучателем, микрофоны (приемники ультразвукового излучения), генератор импульсов, вычислитель, блок счетчиков, содержащий триггеры, выходы которых через соответствующий элемент И подсоединены к входу соответствующего счетчика.
Устройство позволяет наблюдать стереоскопическое изображение.. Эффект объектности достигается за счет того, что на экране устройства фррми руются две проекции, соответствуии1ие двум ракурсам трехмерного объекта. Каждый ракурс строится, исходя из положения глаз наблящателя в пространстве. При этом предполагается, что ось глаза наблнэдателя (условная ось, проходящая через зрачки глаз наблюдателя) всегда расположена горизонтально . Устройство обеспечивает коррекцию изображения при перемещении наблюдателя относительно экрана СЗ.
Однако данное усд-ройство не обеспечивает коррекции изображения при отклонении оси глаз наблюдателя от горизонтального положения, что вызывает нарушение объемного восприятия при отображении объектов, содержащих горизонтальные линии, выходящие за края экрана, пространственные решетки, периодические структуры и др. Недостатком устройства является также использование специализированного стереоскопического индикатора. В таком индикаторе изображение рас сматривается через оптическую аистему, содержащую поляроиды, в которых поглощается значительная часть светового потока. Это требует работы с повышенной яркостью изображения, для чего приходится снижать скорость перемещения луча ЭЛТ. В результате на экране устройства отображается, ограниченное количество векторов (несколько сотен).
Цель изобретения - повышение четкости изображения за счет независимого формирования двух ракурсов изображения за время, не превышакицее величины инерционности зрения человека
Поставленная цель достигается тем, что в устройство для стереоскопической индикации информации на экране видеоконтрольного блока, содержащее селектор, соединенный с ультразвуковыми излучателями, подключенными к генератору импульсов, и оптически связанный с экраном видеоконтрольного блока, последовательно соединенные приемник ультразвуковых сигналов , блок фильтров ультразвуковых частот, блок счетчиков и вычислитель координа г положения глаз, последовательно соединенные блок синхронизации, блок управления, подключенный к видеоконтрольному блоку, блок памяти соединенный с блоком управления, первый выход блока синхронизации подключей ко входу селектора, второй ко входу генератора импульсов, третий - ко второму входу блока счетчиков и вычислителя координат положения глаз, соединенного с блоком памяти, второй вход блока управления является входом устройства,введены последовательно соединенные первый сумматор, блок постоянной памяти, первый блок умножения, элемент ИЛИ, второй сумматор и второй блок умножения, вторые входы сумматоров и блоков умножения подключены к четвертому выходу блока синхронизации, третьи входы сумматоров и второго блока умножения соединены с третьим выходом вычислителя координат положения глаз, первый выход блока памяти подключен к четвертому входу первого сумматора, второй - к другому входу элемента ИЛИ,
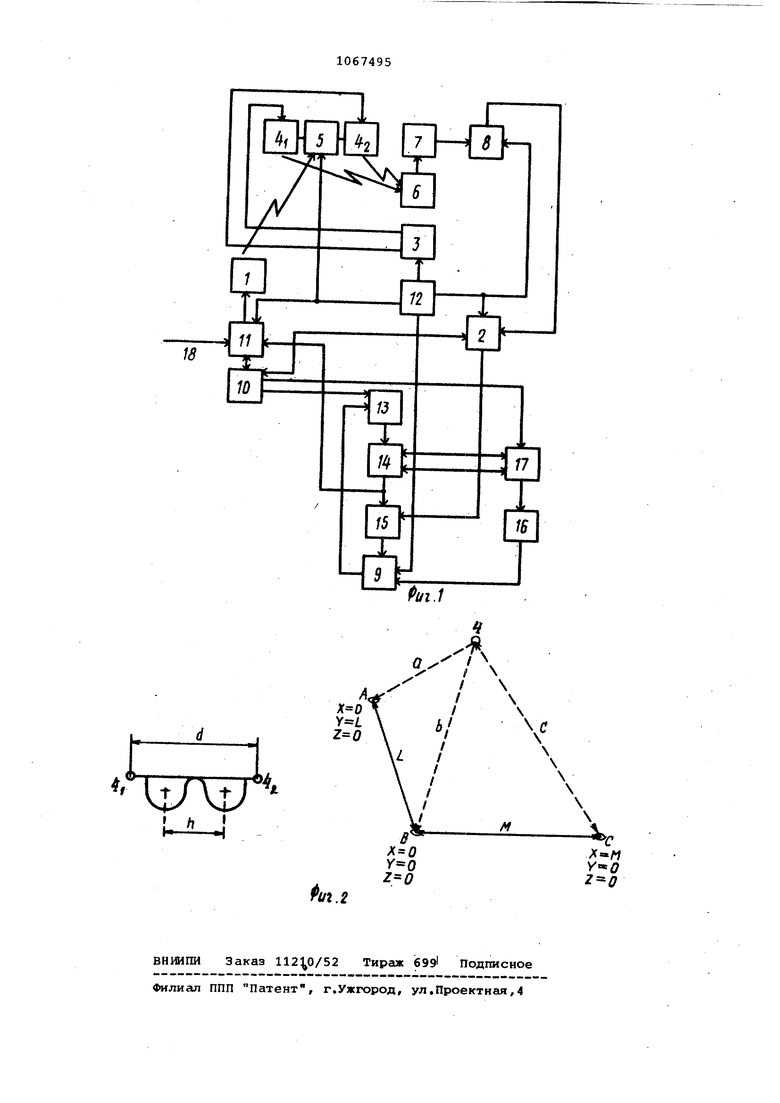
На фиг.1 представлена блок-схема устройства; на фиг.2 - схема определения положения глаз наблюдателя.
Устройство содержит видеоконтрольный блок 1, вычислитель 2 координат положения глаз, генератор 3 импульсов,; излучатели 4ц и 4 ультразвуковых сигналов, селектор 5, приемники 6 ультразвуковых сигналов,блок фильтров 7 ультразвуковых частот, блок 8 счетчиков, блок 9 умножения, блок 10 памяти, блок 11 управления, блок 12 синхронизации, элемент 13 ИЛИ, сумматор 14, блок 15 умножения, блок 16 пбстоянной памяти, сумматор 17, вход 18 устройства. Видеоконтрольный блок 1 содержит, электроннолучевую трубку с фокусирую щей и отклоняющей системами, генераторы векторов и символов. В качестве вычислителя 2 координат положения глаз может использоваться микропроцессор, который на основе данных бло ка 8 счетчиков вычисляет координаты положения глаз наблюдателя. Генерато импульсов 3, формирующий импульсы ультразвуковой частоты, соединен с излучателями ультразвуковых сигналов 4j и 4а для левого и правого глаза соответственно, механически соединен ными с селектором 5, выполненным в. виде светоклапанных очков. Излучатели ультразвуковых колебаний 4i и 4а предназначены для излуче ния импульсных акустических сигналов модулированных разной частотой. Светоклапанные очки состоят из электрооптических модуляторов, кажды из которых осуществляет перекрытие одного из двух зрительных каналов (левого или правого) в соответствии тем, какой ракурс (для правого или для левого глаза) воспроизводится на экране. Электрооптический модулятор может состоять из жидкого крис талла, помещенного между двумя стеклянными пластинами с нанесенными на них прозрачными электродами. Под воз (действием электрического поля жидкий кристсшл из прозрачного становится непрозрачным (диффузно-рассеивающим ). Для независимого определения положения каждого глаза наблюдателя применяются два канала измерения координат. Измерение координат производится ультразвуковой системой. Приемники б ультразвуковых сигналов представляют собой микрофоны с усилителями по числу координат. Они производят прием и усиление акустических сигналов и формирование из них электрических импульсов. Для исключения взаимовлияния излучателей разных каналов измерения координат эти каналы разделяются по частоте. Фильтры 7 разделяют сигналы разной частоты, поступающие от приемников.Блок 8 счетчиков содержит по три триггера в каждом канале, три элемен та И и три счетчика. Блок счетчиков предназначен для подсчета синхроимпульсов в промежутке времени мезкду сигналами с блока синхронизации 12 и от фильтров 7. Коды, устанавливающиеся на выходах счетчиков, пропорционгшьны времени распространения звука от излучателей 4 до приемников 6. Два независимых канала блока счетчиков о.беспечивают одновременное независимое определение координат левого и правого глаза наблюдателя, которое необходимо для получения постоянной величины расстояния мемаду излучателями, 4 и 4j , связанных с положением глаз, при перемещениях наблюдателя относительно экрана. Эта величина принята константой в приведенных ниже формулярах вычисления координат глаз наблюдателя, что повышает точность вычислений и сокращает их объем. Последовательность работы сумматоров 14 и. 17 блоков умножения 9 и 15 и блока 16,постоянной памяти определяется тактовыми синхросигналами, которые формируются в блоке синхронизации 12. Устройство работает следующим образом. В блоке 10 памяти хранятся координаты -для каждой узловой точки отображаемого объекта, заданные в некотором трехмерном пространстве. Эти координаты формируются внешней вычислительной системой и поступают на вход 18 устройства. Для получения эффекта объемности отображаемый объект должен проектироваться на плоскость экрана в двух ракурсах, причем один ракурс должен восприниматься только левым глазом, . другой - только правым. Для получения эффекта оглядывания изображение на экране изменяется в зависимости от положения наблюдателя (координат каждого его.глаза), которое определяется ультразвуковой системой измерения расстояний. На основании полученных данных в вычислителе 2 с помощью сумматоров /14 и 17, блоков умножения 9 и 15 вычисляются измененные координаты УЗЛОВЫХ точек изображения в каждом ракурсе. Из этих координат с помощью генератора векторов в блоке 1 на экране его индикатора формируется изображение. В генераторе векторов коды координат по Оси X и Y преобразуются в ангшоговый сигнал, управляющий перемещением луча ЭЛТ из исходной точки, заданной предыдущими координатг1ми, B заданную точку экрана. Для получения стабильного изображения на экрадае его формирование должно повторять)ся с частотой примерно 50 Гц, т.е. один цикл формирования изображения производится за 20. мс. Так как на экране устройства за ОДИН цикл регенерации формируются два изображения, соответствующие каждому ракурсу, то цикл регенерации делится на два равных подцикла длительностью по 10 мс. В соответствии
с этим из блока 12 синхронизации подаются импульсы с частотой 100 Гц (период 10 мс).
Блок 12 синхронизации вырабатывает также импульс запуска, который об нуляет блок 8 счетчиков и запускает генератор 3, вырабатывающий сигналы с частотой примерно 70 кГц.
Синхронно с запуском формирования изображения на экране для соответствукяцего ракурса из блока 12 синхронизации выдается импульс на переключение световых клапанов в очках селектора 5. При этом обеспечивается поочередное наблюдение каждым глазом соответствующего ракурса.
Генератор 3 импульсов формирует две последовательности импульсов, отличающихся частотой заполнения и поступакядих на соответствующие излучатели ультразвуковых сигналов 4 и 4а. Ультразвуковые сигналы воспринимаются тремя разнесенными в простраН стве приемниками (микрофонами) ультразвуковых сигналов, преобраэукйдими эти сигналы в электрические импульсы двух частот, которые разделяются фильтрами 7. Сигнал с каждого приемника б поступает на соответствующий фильтр 7. Каждый фильтр имеет два выхода, на которых появляются сигналы в зависимости от частоты сигналов принятых приемниками 6. Таким образом, сигнал, вырабатываемый излучателями 4д и 42 поступает в блок 8 счетчиков.
По количеству импульсов, поступивших из блока 12 синхронизации на вход блока 8 счетчиков, определяется расстояние между излучателем и кажды приемником. Расчет расстояний и определение на основании их положения глаз наблюдателя относительно экрана производится в вычислителе 2 положения глаз, куда поступают кода из блока 8 счетчиков. Координаты узловых точек элементов, изображения с учетом положения глаз наблюдателя вычисляется с помощью блоков 14-16. Исходными данными для этих вычислени служит массив координат X,Y,2 отображаемого объекта, которые поступают из блока 10, и координаты центра проектирования fVivn , u,t( , КОТОрлле поступают из вычислителя 2 и которые равны координатам глаз в системе координат акрана - координатам левого глаза Хд, У,1% при отображении левого кадра стереопары и координатам правого глаза х , Y| , 2п при отображении правого кадра стереопары. Центром проецирования для каждого ракурса служит соответствующий глаз наблюдателя.
Координаты глаз наблюдателя в системе приемников ультразвука.определяются следующим образом: для пра вого глаза
xn.x,.
для левого глаза
к«..,х.,
где h - межзрачковое расстояние на блюдателя
d расстояние между излучателями ультразвуковых колебанцй и 4( ,
Xi - координаты левого излучателя;
Х2 - координаты правого излучателя.
Координаты YU ,Ч 2 и ij определяются по аналогичным формулам. Координаты ультразвукового излучателя в системе координат приемников определяются по формулам:
Х«-21)
V гм
2v5Cxvr .
где U и М - расстояние между датчиками (см.фиг.2 ak;,b,c - расстояние от излучателя до приемников А,В,С соответственно. Переход из систем .Координат приемников в систему координат экрана осуществляется с помощью матрицы перехода В Р Ц по формуЛ 1М{
X 15 х +1 i +Р ; Y 4 +Е
p x +pv+р г +р5.
Элементы матрицы Ч РI зависят от взаимного положения экрана и приемников, а также от соответствия единиц измерения в разных системах координат.
Если начало координат экрана имеет в системе координат отображаемо-. го объекта координаты х| ,г , 2 то координаты центра проектирования в системе координат объекта равны
) ) .
Отсюда можно получить координаты уаловой точки элемента изображения X, у на экране в зависимости от положения наблюдателя:
wO V/O
V-.V - л Л1М .jg
ум
V V 4 2
а.
ЦК
В этих формулах для каждой точки на экране изменяются только Хов , УО и 00 г которые поступают из блока 10. Остальные величины изменяются один раз за цикл формирования одной части стереопары, т.е. за 10 мс. Поэтому в вычислителе 2 сравнительно медленно - за 10 мс - осуществляется вычисление координат центров проектирования для левого и правого кадров стереопары в системе крординат отображаемого объекта. Величины Хцп , и поступают из вычислителя 2. На основании этих данных производится вычисление координат в экранном пульте. При этом если на экране отображается 2000 точек, то вычисление координат для одной точки должно осуществляться за 10 мс:2000 5 мкс.
В сумматоре 14 производится one- рация ,(,) , а в сумматоре 17 - операция В первом блоке 15 умножения вьшолняется операция .2.V О Для исклю|чения операции деления при; 1енено ПЗУ 16, в котором записана таблица обратных значений чисел. С выхода ПЗУ 16 считываются величины 1/К
-Но - tto величина поступает н вход второго блока 9 умножения, на выходе которого получается значение
-4.4А „i i2 l2iMliia« 1эта величина
ice -Tt
через элемент ИЛИ 13 с соответствуицей задержкой поступает в первый сумматор 14, где к ней прибаляется величина Х , поступающая вторично из вычислителя 2. Последовательность поступления данных для вычисления преобразованных координа и задержка .между ними управляются программой вычислителя 2 и синхросигналами из блока 12.
Выборка данных из блока 16 произ водится с циклом нескольких сотен. Блоки умножения и сложения, выполненные на современной элементной базе (.СИС и ЕИС), позволяют выполнять операции сложения и умножения 16 битных чисел за время порядка единиц микросекунд при незначительных объе- мах оборудования. В результате пересчета координат в каждом кадре отобРс1жения наблюдатель после поворота головы видит объемное изображение под изменяющимся ракурсом без з сметных задержек.
Стереоскопический эффект основан на том, что элемент изобргикения, представленный в виде двух проекций, имеет на каждой из них разное смещение относительно других элементов изображения. Величина смещения и дает .представление о расположении элементов изображения в пространстве. При этом проекции одного и того же элемента изображения идентифицируются наблюдателем прежде всего по совпадению соответствующих точек по оси, параллельной оси, соединяющей зрачки глаз наблюдателя .
Объекты, проекции которых невозможно однозначно идентифицировать, (бладаю1; свойством горизонтгшьной {Неоднозначности. Например, для горизонтальной прямой, уходящей за края, экрана, невозможно восстановить ее положение в пространстве по двум стереоскопическим проекциям, имеющим горизонтсшьный параллакс. Таким проекциям может соответствовать любая прямая, лежсццая в плоскости, проходящей через ось, соединяющую зрачки наблюдателя и исходную прямую.
Обеспечение возможности получения негЪриэонтального паргшлакса - эффекта устранения горизонтальной неоднозначности - реашизуется в предлагаемом уг-гпойстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОРТОСТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1991 |
|
RU2093970C1 |
| УСТРОЙСТВО СТЕРЕОВИДЕНИЯ В РЕАЛЬНОМ ВРЕМЕНИ | 2011 |
|
RU2474973C2 |
| МОНОКУЛЯРНАЯ ОДНОКАНАЛЬНАЯ СТЕРЕОТЕЛЕВИЗИОННАЯ СИСТЕМА | 1992 |
|
RU2014756C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| СПОСОБ ПОЛУЧЕНИЯ И ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2097940C1 |
| СПОСОБ И УСТРОЙСТВО (ЕГО ВАРИАНТЫ) ДЛЯ ПОЛУЧЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 2001 |
|
RU2202860C2 |
| СПОСОБ ПОЛУЧЕНИЯ ОБЪЕМНОГО ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ | 1996 |
|
RU2113771C1 |
| ФОТОГРАММЕТРИЧЕСКОЕ РАБОЧЕЕ МЕСТО | 2002 |
|
RU2225593C2 |
| Способ формирования и воспроизведения телевизионного сигнала изображения пространственно расположенных объектов и устройство для его реализации | 1982 |
|
SU1072289A1 |
| Устройство для формирования информации на телевизионном индикаторе | 1981 |
|
SU1075298A1 |
УСТРОЙСТЮ ДЛЯ СТЕРЕОСКОПИЧЕСКОЙ ИНД:№КАЦИИ ИНФОРМАЦИИ НА ЭКРАНЕ ВИДЕОКОНТРОЙЬНОГХ БЛОКА, сгодержаиее селектор, соединенный с ультразвуковыми излучателями, подключенньвв к : генератсфу импульсов, и оптически связанный с экраном видеоконтрольного блока, последовательно соедимениые приемник ультразвуковых сигналов, блок фильтров ультразвуковЁ1х частот, .блок счетчиков и вычислитель коорди:ват положения глаз, последовательно ,соединённые блок синхронизации, блок управления, подключенный к видеокрнтрольному блоку, и блок памяти, соеди Л j ьи ненный с блоком управления, первый выход блока синхронизации подключен ко Bxoj селектора, второй - ко входу генератора импульсов, третий - ко второму входу блока счетчиков и вщчислителя координат положения глаз, соединенного с блоком памяти, второй :вход блока управления является входом устройства, отличающее с я тем, что, с целью независимого форкюрования двух ракурсов изображения за время, не превышающее инерционности зрения человека, в него введены последовательно соединенные первый сумматор, блок постоянной памяти, nepBbdt блок умножения, элемент ИЛИ, втор сумматсф и второй блок умножения, второе Bxonu сумматс ов и блоков умножения подключены к четвертому вы;ходу блока сии1яро1в1эации, третьи входы сумматоров и втсфого блока умножения соединены с третьим вычислителя координат положения тлаз, первый выход Впока памяти подключен к четвертому входу первого, с кматора, второй jopyroNQT входу элемента ИЛИ Ф J :о СП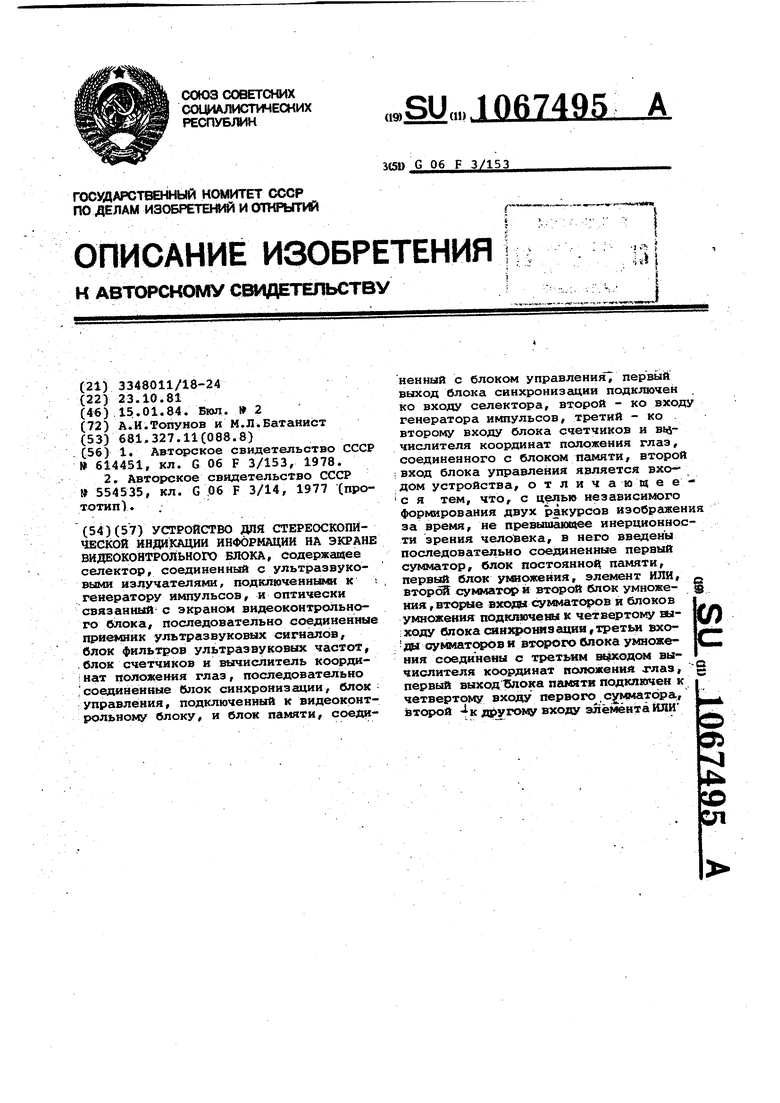
r
Л
/ /
X
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для формирования трехмерных изображений | 1976 |
|
SU614451A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для безрастровой стереоскопической индикации | 1972 |
|
SU554535A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
