И;)бретение относится к машиностроению и может быть исио.льзовано в управляемых виброизолирующих системах, управляемых динамических гасителях, резоиаысных преобразователях и вибромашинах.
Известен виброизолятор с управляемой жесткостью, представляющий собой электромагнитный упругий элемент, выполненный в виде цилиндрической витой пружины, к концам которой прикладывается электрическое напряжение. Электромагнитное взаимодействие между витками изменяет жесткость элемента 1.
Недостатком элемента является небольшой диапазон изменения жесткости (0,05°/о) и значительные по величине (до 100 А) управляющие токи, и, как следствие, больщие затраты электроэнергии.
Наиболее близким к изобретению но технической сущности и достигаемому результату является виброизолятор с управляемой жесткостью, содержащий нелинейные унругие элементы и устройство для изменения их жесткости 2.
Недостатком известного устройства является его большая инерционность и отсутствие возможности дистанционного управления в широких пределах.
Целью изобретения является обеспечение дистанционного управления жесткостью виброизолятора в широких пределах и с малой инерционностью.
Поставленная цель достигается тем, что в виброизоляторе с управляемой жесткостью содержащем нелинейные упругие элементы и устройство для изменения их жесткости, устройство для изменения жесткости нелинейных упругих элементов выполнено в виде последовательно соединенных с ними преобразователей электрического сигнала в перемещение.
Кроме того, преобразователи электрического сигнала в перемещение выполнены пьезоэлектрическими или магнитострикционными.
Нричем виброизолятор снабжен гидравлическим усилителем, выполненным в виде по крайней мере двух соединенных между собой сильфонов различного сечения, обращенные один к другому торцы которых предназначены для связи с объектом, другой торец сильфона с меньщим сечением онерт на нелинейный упругий элемент, а с большим сечением - на преобразователь электрического сигнала в перемещение.
На фиг. 1 представлена схема виброизолятора, выполненного на основе пьезоэлектрических преобразователей; на фиг. 2 - схема виброизолятора с сильфонными усилителями перемещений.
Виброизолятор с управляемой жесткостью (фиг. 1) содержит нелинейные упругие элементы 1 и 2, последовательно соединенС этими элементами преобразователи 3
ные
и 4 электрического сигнала в перемещение
(набор пьезопластин), подключенные к источнику 5 управляющего сигнала, опорные фланцы б и 7, соединяемые с виброактивным и изолируемым объектами (не показаны), регулировочный болт 8, обеспечивающий предварительное поджатие нелинейных упругих элементов 1 и 2, выполненных в виде массивов из тонких чередующихся слоев резины и металла.
Виброизолятор с управляемой жесткостью (фиг. 2) дополнительно содержит два гидравлических (сильфонных) усилителя 9 и 10, через которые преобразователи 3 и 4 взаимодействуют с нелинейными упругими элементами 1 и 2. Каждый сильфонный уснлитель пере.мещений содержит по крайней мере два заполненных жидкостью и соединенных между собой сильфона 11 и 12 различного сечения, обращенные один к другому торцы которых предназначены д;1я связи с изолируемым объектом (через опорный фланец 7), при этом другой торец сильфона 11 с меньшим сечением оперт на нелинейный упругий элемент 1, а торец сильфона 12с большим сечением -- на преобразователь 3.
Виброизолятор с управляемой жесткостью работает следующим образом.
Ноджатием регулировочного болта 8 выбирают начальную жесткость виброизолятора. При подаче на каждую пьезопластииу (не показаны) преобразователей 3, 4 управляющего напряжения от источника 5 управляющего сигнала возникают деформации пьезоэлектрических пластин, которь е вызывают соответствующие деформации нелинейных упругих элементов 1, 2. Эти деформации приводят к изменению жесткости виброизолятора, причем закон изменения жесткости определяется формой управляющего напряжения, подаваемой на пластины от источника 5 управляющего сигнала.
В тех случаях, когда жесткость виброизолятора необходимо изменить в более широких пределах или в нем используются нелинейные упругие элементы с менее жесткой упругой характеристикой, в виброизоляторе устанавливаются ги.дравлические, например, сильфоннные усилители 9 и 10 перемещений. При этом перемещения, например, на выходе сильфонного усилителя 9 перемещений со CTOpoHt i сильфопа 11 с меньщим сечением, столько раз превышают деформацию пьезоэлектрического преобразователя 3, в сколько раз сечение одного сильфона больше сечения другого. Это означает, что при малой высоте пакета пьезоэлектрических пластин преобразователей 3 и 4, и незначительных амплитудах управляюплего напряжения можно получать значительные деформации нелинейных упругих элементов 1, 2 и, как следствие, значительное по величине изменение жесткости виброизолятора. Так в виброизоляторах с управляемой жесткостью на основе металластов возможно изменение жесткости более, чем на порядок.
Таким образом, применение гидравлического усилителя перемещений обеспечивает существенное расширение интервала перестройки жесткости виброизолятора.
Достоинством виброизоляторов на основе пьезоэлектрических преобразователей является их высокое быстродейстрие и малые потери из-за практически реактивного (емкостного) характера внутреннего сопротивления пьезоэлектриков.
Аналогично виброизолятор работает при использовании в качестве генераторов перемещений магнитострикционных преобразователей. Отличие состоит в том, что при этом по заданному закону изменения жесткости виброизолятора должен изменяться ток в управляющей обмотке магнитостриктора.
Виброизоляторы с управляемой жесткостью на основе магнитострикторов обладают меньшим по сравнению с виброизоляторами на пьезоэлектрических преобразователях быстродействием и больщими потерями, но они обычно обеспечивают более п ирокий интервал перестройки жесткости и не требуют для этого высоких напряжений.
Таким образом, предлагаемый виброизолятор по сравнению с известным обеспечивает дистанционное управление жесткостью
5 в широких преде.тах и с малой инерционностью и малыми затратами электроэнергии.

| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый виброизолятор | 1983 |
|
SU1128017A1 |
| Виброизолятор с автоматическим управлением | 1981 |
|
SU989200A1 |
| Силоизмерительный амортизатор | 1986 |
|
SU1375886A1 |
| НЕЛИНЕЙНЫЙ МОДУЛЯЦИОННЫЙ СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2799241C1 |
| ВИБРОИЗОЛЯТОР | 2004 |
|
RU2268420C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЙ, ВОЗНИКАЮЩИХ В ЭЛЕКТРОУСТАНОВКАХ | 2023 |
|
RU2829713C1 |
| Способ изготовления виброизолятора с управляемой жесткостью | 2022 |
|
RU2793978C1 |
| Адаптивный виброизолятор для виброакустической защиты промышленного оборудования и трубопроводов | 2022 |
|
RU2792996C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ УПРУГИХ ЭЛЕМЕНТОВ ВИБРОИЗОЛЯТОРОВ С ПЬЕЗОВИБРАТОРОМ | 2015 |
|
RU2605503C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2176753C1 |
1. ВИБРОИЗОЛЯТОР С УПРАВЛЯЕМОЙ ЖЕСТКОСТЬЮ, содержащий нелинейные упругие элементы и устройство для изменения их жесткости, отличающийся тем, что, с целью обеспечения дистанционного управления жесткостью виброизолятора в щироких пределах и с малой инерционностью, устройство для изменения жесткости нелинейных упругих элементов выполнено в виде последовательно соединенных с ними преобразователей электрического сигнала в перемещение. 2.Виброизолятор по п. 1, отличающийся тем, что преобразователи электрического сигнала в перемещение выполнены пьезоэлектрическими или магнитострикционными. 3.Виброизолятор по пп. 1 и 2, отличающийся тем, что он снабжен гидравлическим усилителем, выполненным в виде по крайней мере двух соединенных между собой сильфонов различного сечения, обращенные один к другому, торцы которых предназначены для связи с объектом, другой торец сильфона с меньщим сечением оперт на нелинейный упругий элемент, а с большим сече€ нием - на преобразователь электрического (Л сигнала в перемещение. ел о оо со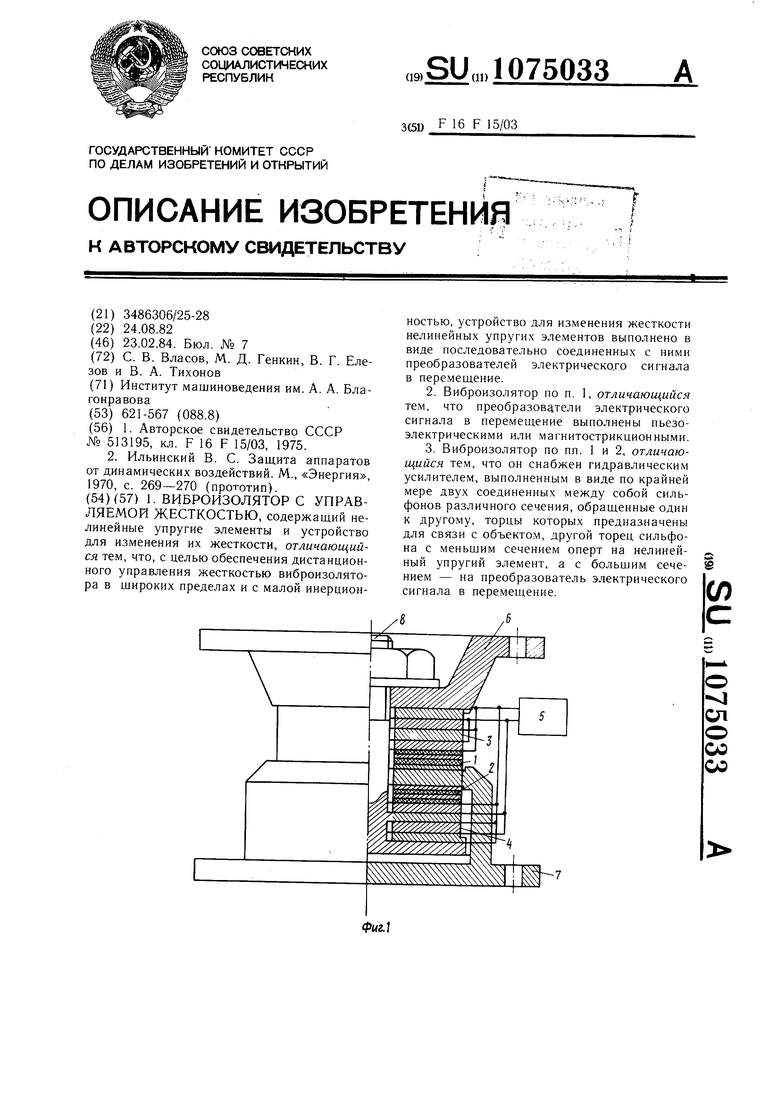
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электродинамический упругий элемент | 1975 |
|
SU513195A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ильинский В | |||
| С | |||
| Защита аппаратов от динамических воздействий | |||
| М., «Энергия, 1970, с | |||
| Нож для надрезывания подошвы рантовой обуви | 1917 |
|
SU269A1 |
