Устройство относится к аналоговой .вычислительной технике и предназначено- для изучения обтекания моделей транспортных средств с работающим лопастным двихсителем.
Известны устройства для моделирования трехмерных поступательноциркуляционных потоков, работа которых основана на том, что модели исследуемых тел, выполненные из диамагнетика, помещаются в прямолинейное квазистационарное магнитное поле и на их поверхности или в окружающем пространстве с помощью индукционных датчиков измеряются магнитные потенциалы и по известным соотнетиениям электромагнитогчц-родинамической аналогии рассчитываются аэродинамические характеристики ij и 2 .
Однако эти устройства не позволяют при моделировании учесть влияние работающего движителя и не обеспечивают высокой точности моделирования.
Наиболее близким к изобретению является устройство для моделирования обтекания транспортных средств с винтовым движителем, содержащее блок задания прямолинейного магнитного поля с установленными в нем измерительными и контролирующими датчиками и металлической моделью транспортного средства, выхЪдные кромки несущих поверхностей которой через электроды, моделирующие пелену свободных вихрей, подсоединены к блоку питания, а измерительные и контролирующие датчики чесез комму ат;ор подсоединены к измерительному блоку, блок моделирования движителя, установленный в блок задания магнитного потока, выполненный в виде соленоида переменного сечения, ось которого параллельна оси движителя, а обмотка подключена к блоку питания, блок контроля положения витков, расположенной в плоскости расположения обмотки блока моделирования движителя, и блок измерения магнитного потока, выполненный в виде индукционной катушки, расположенной на обмотке блока моделирования движителя, причем блок контроля положения витков и блок измерения магнитного потока подклк)чены к соответствующим входам коммутатора З .
Недостатками известного устройства являются отсутствие возможности моделирования обтекания летательных аппаратов с несущим винтом (например, вертолетов) и определения нагрузок, действующих на элементы движителя) а также недостаточная точность моделирования, так как магнитный поток/незамкнутого соленоида, которым моделируется движитель, в районе его торцов существенно искажает поток вокруг модели транспортного средства.
Цель изобретения - расширение класса решаемйх задач и повышение точности моделирования.
Цель достигается тем, что в устройство, содержащее модель прямолинейного магнитного поля, выполненную в виде соленоида с установленными в ней измерительными и контролирующими датчиками и металлической моделью транспортного средства, причем выходы блока питания через электроды, моделирующие пелену свободных вихрей транспортного средства подключены к выходным кромкам несущих поверхностей модели транспортного средства, выход блока контроля положения витков, выполненного в виде индукционных датчиков, и выходы измерительных и контролирующих датчиков через коммутатор подключены к входам измерительного блока, металлическую модель движителя и блок моделирования пелены свободных вихрей движителя, выполненный в виде соленоидов, оси которых совпадают с осью вращения движителя, причем обмотки соленоидов одним концом соединены с выходными кромками модели движителя, а другим концом - с выходами блока питания, индукционные датчики блока контроля положения витков установлены на витках соленоида блока моделирования пелены свободных вихрей движителя нормально к боковой поверхности блока моделирования пелены свободных вихрей движителя, введ-ены блок задания квазивращакщегося магнитного поля, образованный проводниками, соответственно подключенньтми к блоку питания и имекнцими форму образующих тела вращения, составленного из двух соосных, симметричных усеченных конусов с гиперболическими образующими, и цилиндра, основания которого совпадают с большими основаниями конусов,внутри цилиндра по оси симметрии установлена металличес кая модель движителя, блок задания квазивращающегося магнитного поля установлен на поверхности модели транспортного средства, число соленоидов блока моделирования пелены свободных вихрей движителя равно числу контролируемых точек на модели движителя, а витки уложены по соосным винтовым линиям с шагом, равным ijt:V9 , где
V - относительная скорость сноса вихрей,
о - азимутальный угол положения лопати движителя.
Идея устройства основана на вихревой теории.
На фиг. 1 изображена блок-схема устройства для моделирования обтекания транспортных средств с винтовым
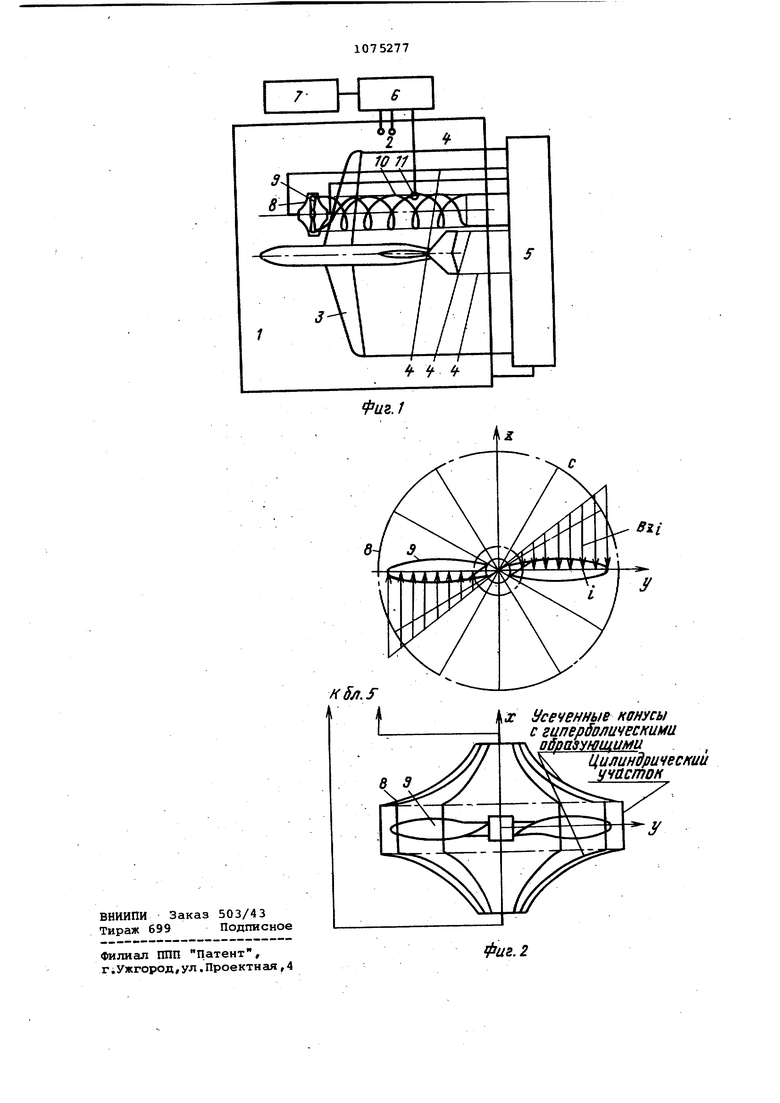
движителем; на фиг. 2 - блок задания квазивращающегося магнитного поля.
Устройство содержит модель 1 прямолинейного магнитного поля с установленными в ней измерительньоми и контролирукщими датчиками 2, металлической моделью 3 транспортного средства, выходные кромки несущих поверхностей которой через электроды 4, представляющие собой системн линейных проводников, подключены к блоку 5 питаний. Измерительные и контролирующие датчики 2 подключаются через коммутатор 6 к измерительному блоку 7. Блок 8 задания квазивращающегося магнитного поля образован множеством проводников, параллельно псяключенных к блоку 5 питания и имегацих форму образующих тела вращения, составленного из двух соосных симметричных усеченных конусов с гиперболическими образующими, соединенных своими большими основаниями цилиндрическим участком, внутри которого по оси симметрии, в заданной ориентации относительно модели транспортного средства 3, размэдается трехмерная металлическая модель движителя 9. Размеры цилиндрического участка определяются линейными размерами модели движителя 9, а форма криволинейных участков проводников (гиперболич-еских образующих усеченных конусов) рассчитывается из условия создания в заданном объеме квазистационарного магнитного поля с заданными характеристиками, а именно, с постоянным вихрем магнитной индукции (rot B const) и с линейным законом изменения магнитной индукции от нуля до максимального значения вдоль направления, нормального к оси вращения. Такое поле при взаимодействии с металлической поверхностью , моделирует обращенное вргицательное двихсение твердого тела в хсидкости или газе. При этом в соответственных точках i( квазивращающегося магнитного поля и вращающегося потока жидкое ти или газа величинами-аналогами являютс я Вг 0,5 rot . (компонента вектора магнитной индукции и линейная скорость во вращатель ном движении) , rot в и со (вихрь, магнитной индукции и угловая скорость вращения) .
Форма проводников, образующих кон тур блока 9 задания квазивращагацегося магнитного поля, описывается урав нением гиперболы вида
Ql
iU
)л(ГЧ5)
где
11, . ..
8
А
(1 м+2х о
4 4х
А - значение функции i (х) прих 0. Блок 10 моделирования пелены свободных вихрей движителя представляет собой соленоид, образованный множеством (по числу особых точек на
модели движителя 9) проводников, уложенных по соосным винтовым линиям с диаметром и шагом, соответствующими диаметру и шагу свободных вихрей от элементов движителя и соединяющих
выходные кромки элементов модели движителя 9 с блоком 5 питания. Ось винтовых линий совпадает вначале с осью вращения движителя 9,.а затем с направлением линий пространственного потока, обтекающего транспортное
средство.
Диаметр винтовых линий зависит от диаметра движителя и в первом приближении они равны.
Шаг винтовых линий может быть
определен различными способами.
Например, из теории воздушных винтов:
,
где V - относительная средняя скорость сноса вихрей; 9 - азимутальный угол положения 5 лопасти движителя относитель но начала отсчета; VOD - относительная скорость перемещения;
CT - коэффициент тяги винта; 0 ч - текущее значение координат точек винтовой линии в осевом направлении при (шаг винтовой линии). Блок 11 контроля положения витков 5 представляет собой систему однокомпонентных индукционных датчиков, подключаемых через коммутатор & к измерительному блоку 7 и размещенных на проводниках, моделирующих свободные вихри движителя таким образом, что
0 оси их катушек нормальны к боковой поверхности блока 10 моделирования пелены свободных вихрей движителя.
Работу устройства поэтапно можно разделить на монтаж модели, задание граничных условий и регистрацию показания измерительных датчиков.
В модели 1 задания прямолинейного магнитного поля, моделирующего поступательное движение жидкости 0 или газа, устанавливается металлическая модель исследуемого транспортного средства 3, выходные кромки ее несущих поверхностей системо электродов 4, моделирующих пелену свободных вихрей транспортного србдства, соединяются с блоком 5 питания.
Металлическая модель движителя 9 размещается в блоке 8 задания квазивращакщегося магнитного поля, моделирующего вращательное движение жидкости или газа, по оси симметрии в центральной его части.
Блок 8 задания квазивращакицегося магнитного поля с размещенной в нем моделью движителя 9 устанавливается на модели транспортного средства 3 в заданной компоновке.
Блок 10 моделирования пелены свободных вихрей движителя монтируется на модели таким образом, что один торец соленоида, диаметр и шаг витков которого равны диаметру и шагу свободных вихрей, сходящих с элементов движителя, устанавливается в плоскости выходных кромок модели движителя 9, а другой торец соленоида располагается вдали от модели транспортного средства 3. При этом первоначально оси соленоида совпадает с осью движителя. Проводники, образугацие обмотку соленоида, подсоединяются с одной, стороны к выходным кромкам элементов движителя, а с другой стороны - к,блоку 5 питания.
На выходящих кромках моделей тран спортного средства 3 и -движителя 9 и в заданных точках потока устанавливаются измерительные и контролирующие датчики 2, представлякадие собой системы индукционных катушек.
Однокомпонентные датчики блока 11 контроля положения витков размещаются на проводниках, модёлирукицих свободные вихри движителя таким образом чтобы оси их катушек были нормальны боковой -поверхности блока 10 моделирования пелены свободных вихрей движителя.
Все измерительные и контролирующи датчики 2 и блок 11 контроля положения витков через коммутатор б .подклю .чаются к измерительному- блоку 7 .
На собранной таким образЪм модели приступают к заданию граничных условий. Вначале организуется модель поступательно-циркуляционного обтекания транспортного средства. Для этого включается блок 5 питания ив электродах 4, моделиру оцих пелену свободных вихрей транспортного средства, задаются токи, обеспечивающие выполнение аналога постулата Чаплыгина-Жуковского на выходньах, кромках несущих поверхностей модели транспортного средства 3.
Затем организуется модель работающего движителя. Для этого от блока 5 питания на блоки 8 задания квазвращающегося магнитного поля и 10 моделирования пелены свободных вихрей . движителя подаются такие токи, которые
обеспечивают .заданный (по частоте вращения движителя) линейный закон изменения магни.тной .индукции поля, набегакщего на модель движителя 9, и выполнение аналога постулата .Чаплыгина-Жуковского на выходных кромках элементов мо.цели движителя 9. Выполнение этих граничных условий контролируется по показаниям измерительных и контролирующих датчиков 2, установленных соответственно в плоскости входных кромок и на выходных кромках элементов модели движителя 9 и подключенных к измерительному блоку 7 через коммутатор 6. Далее, по показаниям блока 11 контроля положения витков, подключе.много через коммутатор 6 к измерительному блоку 7, производится корректировка пространственного положения блока 10 моделирования пелены свободных вихрей движителя таким образом, чтобы по всей длине соленоида равнялась нулю нормальная к его поверхности, составляющая магнитной индукции суммарного поля, создаваемого моделью 1 прямолинейного магнитного поля, электродами 4, моделирующими пелену свободных вихрей транспортного средства, блоком 8 з.адания квазивращающегося поля и блоком 10 моделирования пелены свободных вихрей движителя.
После выполнения перечисленных граничных условий измерение необходимых величин на поверхности моделей транспортного средства 3 и движителя 9 или в окружающем их пространстве производится с помацью измерительных датчиков 2, подключенных через коммутатор 6 к измерительному блоку 7 .
Устройство для моделирования обтекания транспортных средств с работающим движителем повышает точность моделирования и расширяет класс задач аэрогидромеханики, решаемых при аналоговом моделировании, так как оно позволяет не только учесть суммарное влияние работы движителя на обтекание транспортного .средства, но и исследовать обтекание летательных аппаратов с несущим винтом (например, вертолетов), а также исследовать характер нагружения элементов движителя при их различном фазовом положении относительно транспортного средства, исследовать характеристики движителя с учетом конечного числа врсмдающихся элементов, исследовать интерференцию движителя и транспортного средства.
Предлагаемое устройство позволяет в ряде случаев существенно сократить дорогостоящие исследования в аэроди намических трубах и бассейнах.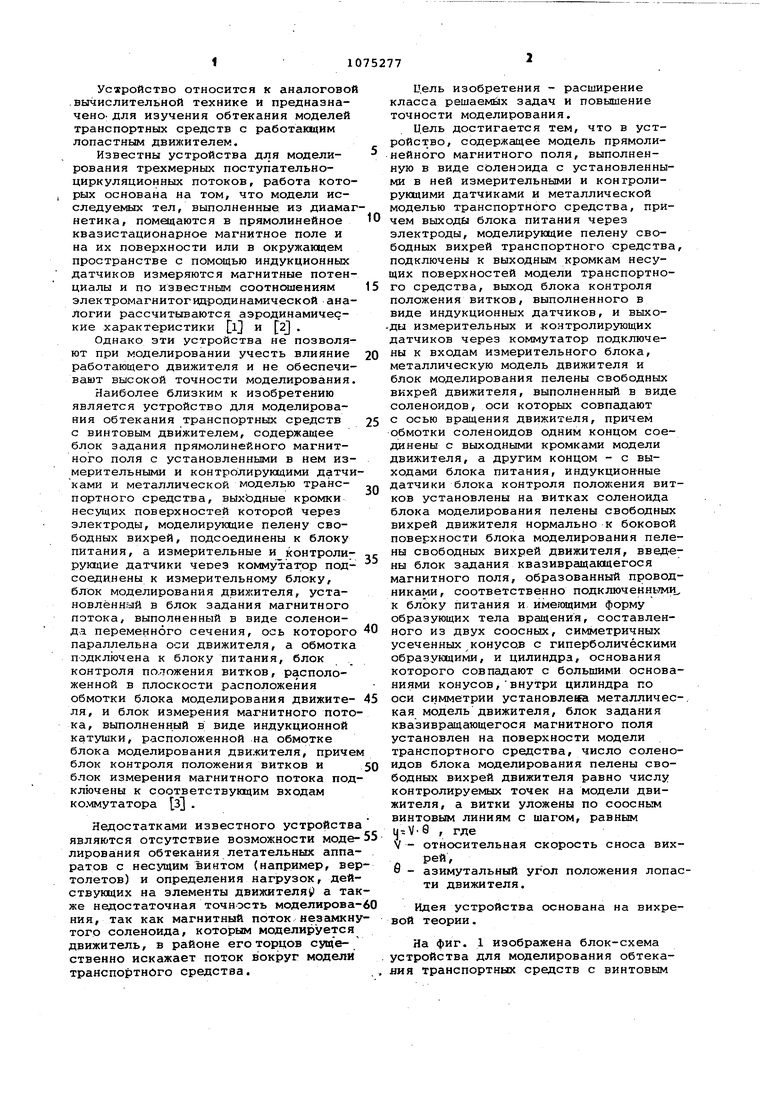


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования обтекания транспортных средств с реактивными движителями | 1983 |
|
SU1088025A1 |
| Устройство для моделирования обтекания транспортных средств | 1974 |
|
SU516060A1 |
| Устройство для моделирования трехмерного обтекания летательных аппаратов | 1983 |
|
SU1098013A1 |
| Устройство для моделирования обтекания транспортных средств | 1985 |
|
SU1285498A1 |
| Устройство для моделирования обтекания транспортных средств с реактивными движителями | 1987 |
|
SU1509953A1 |
| Устройство для моделирования обтекания транспортных средств с реактивными движителями | 1990 |
|
SU1714629A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТРЕХМЕРНЫХ ПОСТУПАТЕЛЬНО-ЦИРКУЛЯЦИОННЫХ ПОТОКОВ | 1971 |
|
SU305487A1 |
| Устройство для моделирования отрывного обтекания острых кромок несущих поверхностей | 1985 |
|
SU1310857A1 |
| Устройство для моделирования обтекания транспортных средств,имеющих проточные каналы | 1987 |
|
SU1432567A1 |
| Устройство для моделирования трехмерного обтекания летательных аппаратов | 1986 |
|
SU1467560A2 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОБТЕКАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ВИНТОВЫМ ДВИЖИТЕЛЕМ, содержащее модель прямолинейного магнитного поля, выполненную в виде соленоида с установленными в ней измерительными и контролирующими датчиками и металлической моделью транспортного средства, причем выходы .блока питания через электроды, моделирующие пелену свободных вихрей тр нспортного средства, подключены к выходным кромкам несущих поверхностей мо.дели транспортного средства, выход блока контроля положения витков, выполненного в виде индукционных датчиков , и выходы измерительных и контролирующих датчиков через коммутатор подключены к входам измерительного блока, металлическую модель движителя и блок моделирования пелены свободных вихрей движителя, выполненный в виде соленоидов, оси которых совпадают с осью вращения движителя. причем обмотки соленоидов одним концом соединены с выходными кромками модели движителя, а другим концом с выходами блока питания, индукционные датчики блока контроля положения витков установленьг на витках соленоида блока моделирования пелены свободных вихрей движителя нормально к боковой поверхности блока моделирования пелены свободных вихрей движителя, отличающеес я тем, что, с целью повышения точности моделирования и расширения класса решаемых задач, оно дополнительно содержит блок задания квазивращающегося магнитного поля, образованный проводниi ками, соответственно подключенными к блоку питания и имеющими форму об(Л разующих тела вращения, соста.вленного из двух соосных, симметричных усе ченных конусов с гиперболическими образующими, и цилиндра, основания которого совпадают с больыими основаниями конусов, внутри цилиндра по 1 оси симметрии установлена металличес кая модель движителя, блок задания квазивращакадегося магнитного поля установлен на поверхности, модели р1 транспортного средства, число соленоидов блока моделирования пелены свободных вихрей движителя равно числу контролируемых на модели движителя точек, а витки уложены по соосным винтовым линиям с шагом, равным ц V б , где Y - относительная скорость сноса вихрей. е азимутальный угол положения лопасти движителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТРЕХМЕРНЫХ ПОСТУПАТЕЛЬНО-ЦИРКУЛЯЦИОННЫХ ПОТОКОВ | 0 |
|
SU305487A1 |
| G, 06 С, 7/44, 1969, 2.Авторское свидетельство СССР № 516054, кл | |||
| G, 06 Q 7/48, 1974 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
