Изобретение относится к области магнитных измерений. По основному авт. св. 1004925 известно устройство для измерения магнитного поля, содержащее последо вательно соединенные датчик магнитного поля полосовой фильтр, усилите и синхронный фильтр, а также преобр зователь скорости смещения, через избирательный усилитель подключенный к второму входу синхронного фил тра, при этом преобразователь скоро ти смещения жестко прикреплен к дат чику магнитного поля 13 . Эффект подавления помехи, вызван ной в измерительной цепи вибрацией датчика магнитного поля в постоянном магнитном поле земли, достигает ся за счет некогерентности измеряемого -сигнала и помехи, что и позволяет вьщелить их раздельно соответственно на дифференцирующем и интегр рующем выходах синхронного фильтра. При необходимости синхронно изме рить больше одной составляющей магнитного поля или измерять синхронно с магнитной составляющей когерентну составляющую электрического поля, которые вместе характеризуют электромагнитное поле в точке измерений .узкополосный случайный сигнал с укрепленного на датчике магнитного по ля .вибропреобразователя не может быть использован для фильтрации сиг нала с дополнительных датчиков, поскольку в общем с.лучае вибрационные процессы, воздействуюише на каждый из них, несинфазны и некогерентны. Это требует установки отдельного вибропреобразователя с избирательным усилителем на каждом из датчико составляющих поля. Такая установка усложняет измерительную аппаратуру снижает ее надежность. В том случае, когда вибропреобра зователи устанавливаются на датчики электрического поля, геометрические размеры которых существенно больше размеров яибропреобразователя, синхронная .фильтрация с управлением фильтра вибропомехой вообще может быть неэффективной, поскольку процесс с вибропреобразователя будет характеризовать вибрацию ограниченного объема датчика электрического поля, а помеха в измерительной цепи будет формироваться за счет вибрации всего его объема. Цель изобретения - расширение функциональных возможностей и повыг шение помехоустойчивости. Цель достигается тем, что в устройство для измерения переменного магнитного поля дополнительно уведены последовательно соединенные квадратурный фазовращатель и второй си зфонный фй.льтр, третий синхронный фильтр и переключатель, а также последовательно соединенные датчик электрического поля и второй усилитель и второй датчик переменного магнитного поля и третий усилитель,при этом второй вход второго и первый вход третьего синхронных фильтров через переключатель связаны с выходами второго и третьего усилителей, вход квадратурного фазовращателя соединен с выходом первого синхронного фильтра и вторым входом третьего синхронного фильтра, а выходы второго и третьего синхронных фильтров подключены соответственно к второму и третьему регистраторам. На чертеже представлена блок-схема устройства. Устройство для измерения переменного магнитного поля содержит последовательно соединенные первый датчик 1 магнитного поля полосовой фильтр 2, усилитель 3 и первый синхронный фильтр 4, а также преобразователь 5 скорости смещения, через избирательный усилитель 6 подключенный к второму входу синхронного фильтра 4, выход которого соединен с входом регистратора 7, при этом преобразователь 5 скорости смещения жестко прикреплен к датчику 1, а также последовательно соединенные кващратурный фазовращатель 8 и второй синхронный фильтр 9, третий синхронный фильтр 10, а также последовательно соединенные датчики 11 электрического поля и второй усилитель 12 и датчик 13 временного магнитного поля и третий усилитель 14,при этом второй вход второго 9 и первый вход третьего 10 синхронных фильтров через двухпозиционный переключатель 15 связаны с выходом второго и третьего усилителей 12 и 14, вход квадратурного фазовращателз 8 соединен с выходсян пеьВого синхронного фильтра 4 и вторым входом третьего синхронного фильт- ра 10, а выходы второго и третьего синхронных фильтров 9 и 10 подключены соответственно к вторсмиу и третьему регистраторам 16 и 17. Устройство работает следующим образ ом. Блоки 1-4 обеспечивают на дифференцируквдем выходе первого синхронного фильтра 4 выделение узкополосного процесса с центральной частотой настройки полосового фильтра 2 и избирательного усилит.еля 6. Этот процесс линейно связан по фазе и интенсивности с пространственной составляющей измеряемого переменного маг- нитного поля, действующей на датчик 1, и с точностью до погреыности измерений поля не содержит помехи, обусловленной вибрацией датчика 1 в постоянном магнитном поле Земли, за счет управления работой синхронного фильтра 4 ситналом с вибропреобраэователя 5, усиленным избиратель ным усилителем 6. Так как коэффициен преобразования поля в электрический .сигнал на входе регистратора 7 вещественен и равен единице, его можно обозначить через . Е Н(-Ц С05 Wjjt , где Н2 (t) - мгновенное значение огибающей пространственной составляющей магнитного поля, действующей на датчик , % - центральная частота полосы пропускания полосового фильтра 2 и избирательного усилителя 3} - текущее время. Следовательно, в силу когерентности всех составляющих электромагнитного поля сигнал Н (-t) cos COQ-I является источником информации о сое тавляимцей поля Н и, кроме того, может быть использован для повышения помехоустойчивости любой иной компоненты паля в точке измерений. Пусть имеется необходимость синхронно измерять.более чем одну пространственную составляющую магнитной компоненты электромагнитного поля в той же полосе частот ш с цент ральной частотой 4IX) . Тогда при втором положении переключателя 15 коэффициент линейного преобразователя измеряемой составляющей в электричес кий сигнал может быть записан в виде ,,(t{cos{u -t -/)4U2g(ttcos(u,t.2eh 4U2 U}co3(u)ot.V2), где Н- (i) - мгновенное значение огибающей пространст венной составляющей магнитного поля, дей ствующей на датчик 1 магнитного поля; Ч - фазовый сдвиг составляющей поля Н относительно составляющей Н ; U2. (t - мгновенное значение огибакмцей помехи, вызванной вибрацией дат чика 13} % - случайная фаза помехи Ugg относительно фазы измеряемого магнит ного поля; мгновенное значение огибающей собственного шума приемно-измерительного канала составляющей Н г {y - случайная фаза собственного шума приемноизмерительного канала составляющей Н относительно измеряемого магнитного поля. При подключении сигнала Е. к управлякицему входу синхронного фильтра 10, на основной вход которого подан в силу известного свойстсигнал Ева фильтра 10 на его интегрирующем выходе выделится синфазная с Е составляющая сигнала .Е , а несинфазные и некогерентные составляющие будут: подавлены. Таким образом, регистратором 17 будет регистрироваться вещественная относительно Н составлянхцая Е с точностью, повышенной за счет подавления вибрационной помехи (t| и собственного шума приемноизмерительного канала U2|y{t). Следует отметить, что точно также могут быть подавлены и помехи любого другого происхождения, которые некогерентны измеряемому магнитному полю. При подключении сигнала Е-, к управляющему входу синхронного фильтра 9 через квадратурный фазовращатель 8, осуществляющий изменение фазы Е на 90°, на интегрирующем выходе этого фильтра выделится составляющая сигнала Е2 , сдвинутая относительно Е на 90 °, т.е. J Hj , а подавленными вновь окажутся сиг- налы , ( и гш также любые другие помехи, некогерентные измеряемому магнитному полю. Таким образом, при наличии двух дополнительных синхронных фильтров 9 и.10 ча регистраторах 16 и 17 регистрируются и измеряются вещественная и мнимая составляющие компоненты Н. относительно компоненты Н , по которым легко могут быть вычислены амплитуда и фаза Н2. При необходимости синхронно с измерением магнитного поля Н измерять в полосе Atx) с центральной частотой u)g электрическую составляющую поля используются усилитель 12 и датчик 11 электрического поля при первом положении переключателя 15. При прочих равных условиях процесс на основных входах синхронных фильтров 9 и 10 может быть записан ввиде Ct)cos () Og,(t|cos (.V, ) 0,(t| coi {ы -fctV J.U Jttco3(u,,tf V ), мгновенное значение огибающей измеряемой составляющей электрического ПОЛЯ} фазовый сдвиг составляющей электрического поля Ei относительно
составляющей магнитного поля 1Ц J
мгновенное значение огибающей индуктивной помехи, вызванной вибрацией датчика 10}
.в. случайная фаза помехи Ugj / относительно фазы измеряемого электромагнитного поля, в т.ч.
10 его составляющих Н и
ш, 1 мгновенное значение огибающей помехи, вызванной турбулентнос15тью вмещающей среды возле электродов датчика ; случайная фаза помехи
шэ
и
относительно фазы
шэ
измеряемого электромаг-20 нитного поля;
LJ (t) мгновенное значение
U)K огибающей собственного шума приемно-измерительного канала состав-25 ляющей ;
случайная фаза собстшквенного шума приемноизмерительного канала составляющей Е отно30сительно измеряемого магнитного поля.
При подютючении сигнала Ej к осовным входам синхронных фильтров 9 10, а сигнала Е - к управляющему
35 ходу синхронного фильтра 10 и к вадратурному фазовращателю 8, котоый, в свою очередь, подключен к упавля щему входу синхронного фильта 9, по аналогии с первым варианTSM с точностью до погреиности фильтрации на регистраторах 16 и 17 будут зарегистрированы вещественная и минимальная относительно Н составляющие , что полностью характеризует аплитуду и фазу g .
Использование предложенного устройства позволяет расширить функциональные возможности устройства за счет синхронного измерения любого количества пространственных составлякнцих магнитной и электрической компонент поля с точностью, не меньшей чем измерение основной составляющей, независимо от характера и источников помех, воздействующих на датчики дополнительных составляющих. Указанное расширение возможностей позволяет получить информацию не только об амплитуде этих составляющих, но и в параметрах поляризации поля об импедансе окружагацей среды, открывает пути простой технической реализации всенаправленных приемных антенн для радиосвязи на подвижных объектах. Кроме того, независимость эффективности подавления помехи в каналах измерения дополнительных составляющих поля от характера ее источника повышает помехоустойчивость в этих каналах в сравнении с помехоустойчивостью канала в известном устройстве.
Таким образом, сигнал Е может быть использован для управления сколь угодно большим числом синхронных фильтров для фильтрации процессов, характеризующих составляющие измеряемого электромагнитного поля на частоте ш,, в полосе йш .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения переменного магнитного поля | 1982 |
|
SU1129574A2 |
| Устройство для измерения переменного магнитного поля | 1981 |
|
SU1004925A1 |
| Устройство для аэроэлектроразведки | 1980 |
|
SU890336A1 |
| Устройство компенсации импульсных помех | 1985 |
|
SU1266010A1 |
| Способ измерения квадратурных составляющих периодических сигналов | 1987 |
|
SU1525599A1 |
| Устройство для обработки импульсных радиосигналов | 1983 |
|
SU1113759A1 |
| Устройство для геоэлектроразведки | 1976 |
|
SU661473A1 |
| Устройство для сравнения амплитуд двух низкочастотных гармонических напряжений | 1983 |
|
SU1128199A1 |
| Устройство для геологоразведки | 1979 |
|
SU807190A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОННОЙ КОНЦЕНТРАЦИИ В ЗАДАННОЙ ОБЛАСТИ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208814C2 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ ПО авт. св. № 1004925, отличающеес я тем, что, с целью расширения функциональных возможностей и повышения помехоустойчивости, в устройство дополнительно введены последовательно соединенные квадратурный фазовращатель и второй синхронный фильтр, третий синхронный фильтр и переключатель, а также последовательно соединенные датчик электрического поля и второй усилитель и второй датчик переменного магнитного поля и третий усилитель, при этом второй вход второго и первый вход третьего синхронных фильтров через переключатель связаны с выходами второго и третьего усилителей, вход квадратурного фазовращателя соединен с выходом первого синхронного фильтра и вторым входом третьего синхронного фильтра, а выходы второго и третьего синхронных фильтров подключены соответственно к второму и третьему § регистраторам. k эо ел ел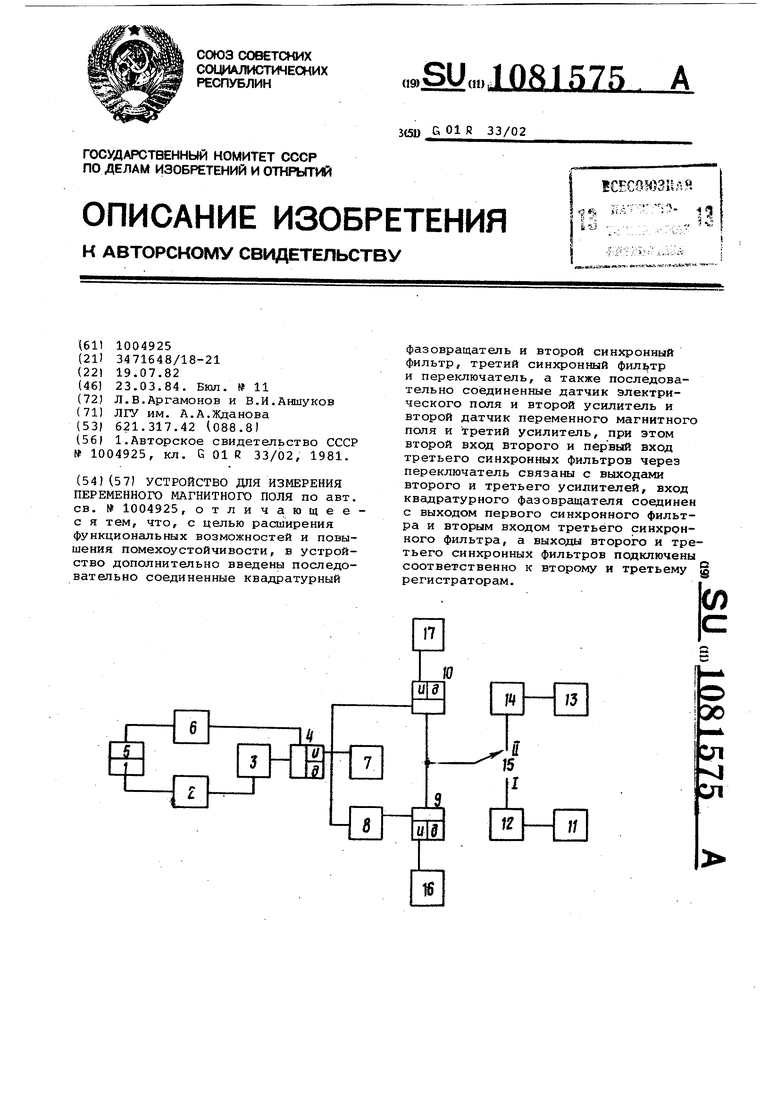
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
