(54) УСТЮЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОГО МАГНИПЮГО ПОЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения переменного магнитного поля | 1982 |
|
SU1081575A2 |
| Устройство для измерения переменного магнитного поля | 1982 |
|
SU1129574A2 |
| Измерительное устройство для геоэлектроразведки | 1980 |
|
SU940110A1 |
| Устройство для измерения вибрации роторных машин | 1980 |
|
SU930018A1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1998 |
|
RU2158940C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2001 |
|
RU2207596C2 |
| Устройство для измерения слабой остаточной намагниченности образцов | 1982 |
|
SU1122906A1 |
| Устройство для измерения проводимости (его варианты) | 1980 |
|
SU974236A2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОЦЕНКИ ЧАСТОТЫ РАДИОИМПУЛЬСОВ | 2004 |
|
RU2267226C1 |
| Устройство для измерения тока локомотивной сигнализации | 1979 |
|
SU855513A1 |
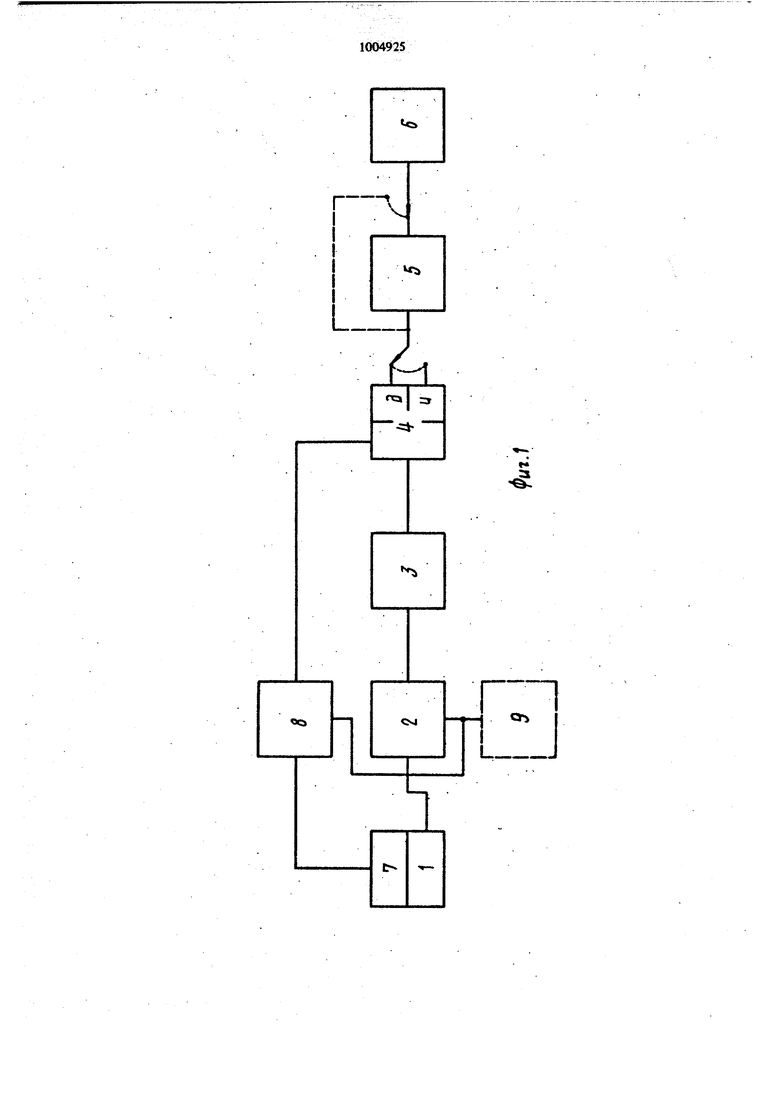

Изобретение относ1п°ся к магнитным язме рбниям и может быть использовано для измерения искусственных и естественных перемшных магнитных полей на движущихся носите лях приемно-йзмерительной аппаратуры: самолетах, вертолетах, надводных и подводных кораблях и платформах. - при геофизических съемках и приеме радиосигналов в условиях вибрации первичных преобразователей переменного магнитного поля в постоянном Maiwttном поле Земли (МПЗ). Известно устройство для приема и измере ния переменного магнигиоги поля в ушовиях вибрации первичного преобразователя в МПЗ, содержащее узлы для подавления помехи вибрационного происхождения, в которых две 1Ю ;1овины обмотки преобразователя на гибком сердечнике включены в противоположных направлениях, обеспечивая статистическую компенсацию вибропомех, возникающих в разных направленных частях обмотки 1. Недостатком данного устройства является низкая точность. Известно устройство для измерения cftepe tieHHoro магвилюго поля, содержащее соединшные последовательно датчик переменного магнитного поля, полосовой фильтр, уооштель, а также регистратор {2Ь Недостатком данного устройства является его точность. Цёлъ изобретения - повышение точности устройства. Поставлжная цель достигается тем, что в устройство для измерения переменного магиитиого поля, содержащее соединенные после- , довательно датчик переменного магнитного поля,, полосовой фильтр, усилитель, а такжефегнстратор, введены синхронный фильтр, преобразователь скорости вибрационных смещений и избирательный усилител), пртпем вьо1од усилигеля через синхронный фильтр подключён к регаст{мггору, управляющий вход синхронного фильтра через избирательный усилитель ооедииеи с выходом преобразователя скоростя вибрационных смещений, жестко скреплеиного с корпухх м датчика переменного магнитного поля. На фиг. 1 представлена схема устройства для измерения переменного Магнитного поля; на фиг. 2 - эгпоры напряжений на элементах устройства. Устройство для измерения переменного магнитного поля состоит из пер вичного пре;образователя - датчика 1 пераиенного магнитного поля, подключеииого к полосовому фильтру 2, причем датчик 1 переменного маг нитного поля является активиым элементом полосового фильтра 2,, вюпочеиного на вход усилителя 3. Выход усилителя 3 соединен с входом синхронного фильтра 4, прегназначенного для подачи фильтруемого сигнала, а к его дифференцирующему выходу подключены регистратор 5 иСиндикатор 6. Преобразователь 7 скорости вибрационных смещший, механиче ки жестко скрепленный с датчиком 1 переменного магнитного поля, подключен на вход избирательного усилителя 8, «стоп и полоса пропускания которого всегда равны частоте и полосе пропускания полосового фильтра 2. Избирательный усилитель 8 подключен к коммутатору синхронного фильтра 4. Блок 9 , перестройки частоты подключен к полосовому фильтру 2 н из&1рательному усилителю 8. Устройство,работает следующим образом. Напряжение с датчика 1 переменного магнитного поля, пройдя полосовой фильтр 2, настроенный на частоту Шо и усилитель 3, представляет Собой квазигармсжическяй процесс в виде суммы. ё UlcosJtUQi if (t)e05ty t+ +EJt)co3((1) - А- где Е (t) cos UlQjt - напряжение, наведенное изм яемым переменным магнитным полем, пропор циональное его амплитуде или мгновенному значению огибающей и жестко связанное с ним по фазе; En(t) -напряжение, наведенное за счет вибрации преобразователя поля в МПЗ на частоте имеющее относительно измеряемого поля случайную фазу Ulg - частота настройки поло, сового фильтра 2 и бирательного усилителя 8; Ц результирующая фаза процесса относителыю фазы измеряемого поля. В случае, когда измеряемое поле создается искусственным источником, работающим в nepHojjHHecKOM режиме с частотой повторения Мо. Е -(t) постоянная величина, не зависящая от R пропорциональной амплитуды измеряемого поля. Если измеряется естественное переменное магнитное поле, то E(t) :1федстаЕЛяет собой переменное напряжение, изменяющееся во времени по случайному заIcoHy, определяемому законом изменения во ,времени огибающей случайного процесса на :частоте спектральной составляющей поля, рав ной частоте настройки WQ полосового фильтра 2.: г() представляет собой случайную , величину, пропорциональную мгаовенному значению огибающей квазигармонического процесса, описывающего закон изменения времени скорости вибрационного смещения вибропреобразователя, а следовательно и жестко скрепленного с ним Х1атчика 1 переменно-. го магнитного поля, на частоте избирательного усилителя 8, как и частота полосового фильтра 2, равной частоте измеряемого поля «Wg. В силу того, .что закон изменения во- времени B2(t) определяется только вибрацией носителя в свойствами подвески датчика (переменного магнитного поля, указанные в формуле 1) составляющие процесса S (t)Ё(t)CGз(iO Ji4Ч некогерентны и не совпадают по фазе, при этом Процесс if (tj Ё2 (t) cos ( u/pi V;. 1федставляет собою ви.брационную помеху иа частоте , а -процесс ), полезный сигнал, характе|жзующий измеряемое переменное магнитное поле на частоте , причем частотные полосы этих процессов одинаковы в (жлу Одинаковых полос пропускания фильтра 2 и избирательного усилителя 8. Эпю1ш напряжений полезного а1гнала, помехи и суммарного .проц са приведеюл на фиг. 2 (а, б, в). Напряжение с преобразователя 7 скорости вибрационных смещений после усиления избирательным усилителем 8 представляет собою квазигармонический случайный процесс, хартктеризующий закон измеиения во временя ;ско| сти вибрационных смещений датчика 1 переменного магнитного поля, и может быть 1федставлен в виде . . i(i)E(t)C09(, (2; ще В j(t) - случайная величина, пропорцвоиалшая мгновенному зтчеиию огибающей скорости вибрэциоиного смещения на частоте лд|. При зтом вследствие того что иапряжение . вибрационной помехи g (t) в соответствии с аксжом индукции связаио по фазе со скоросью измене гая магнитного потока чер сечение. хватываемое витками первичного преобразовате я поля, а следовательно, и со скоростью его мещеиий в МПЗ, то процессы g (t) и (t) яихронны (с точностью до постоянны сдвив фазы в преобразователях поля и вибрации. 5, 1(Ю которые могут быть скомпенсированы при наь стройке устройства и в дальнейшем изложешш не расрматриваются). Эпюра процесса f(t),приведена на фнг. 2 (г). Таким образом, одна из составляющих процесса S(t), а именно h (t), является жестко связанной по фазе и интенсивности со спектральной составляющей измеряемого переменного магнитного поля с центральной частотой Ш0 и полосой, соответствующей полосе пропускания полосового фильтра , а вторая - g (t) жестко связанно.й по фазе со скоростью вибрационного смоцения преобразов теля поля в МПЗ f (t), являющегося причиной возникновения вибрациониой и выделенной в устройстве на частоте Шд в той же .:. полосе ли1 Следовательно, если подать процесс 6 (t) на вход синхронного фильтра 4, предназначенный для фильтруемого сигнала,а процесс f(t)- на вход, предназначенный дпя сигнала, управляющего его коммутационной «схемой, то он Ha4HjeT Поочередно, цикпически, с периодомTQ - передавать проце 1.. S(t), на конденсаторы фильтра емкостыо С каждый, составляющие его интегратор, где про ходит накопление мгновенных значений процесса S(t) , синфазных процессу f (t), т.е. значений его составляющей (t), В то же . время значения составляющей n(t) процесса S(t) на интеграторе фильтра не накапливаются, а выделяются в его дафференикрующей цепи, представляющей включенное последовательно с интегратором активное сопротивлбние R. В соответствии с теорией синхронного фильтра выбором величины b -Ai, PC . ггде At - время подключения процесса S (t) к каждому из конденсаторов интегратора в течение одного цикла коммутации Тд, так, чтобы удовлетворялось соо ошение b « 1(3) можно добиться, что коэффициент передачи фильтра для составляющей процесса S (t), синхронной с процессом f(t), т. е. g(t), на выходе гатегратора 4 и фильтра - К,. близок к единице, и на этом выходе процесс a(t) практически повторяйся с известным фазовым сдвигом ,а на выходе дифференцирующе й цепи фильтра - близок к . нулю, т. е. процесс g(t) здесь будет подавлен. Для составляющей процесса S(t), асинхронной с процессом I (t) т. е. h( t), наобо рот, коэффшдаент передачи на выходе дафференцирующей цепи К,3р,по модулю близок к единице, и процесс h (t) на я&л практически в6cпJpoизвoдitгcя с известным фазовым сдвигам fg, тогда как на интегри56рующем выходе произойдет его существенное подавление. Таким образом, на дифферендарующем выходе синхронного фильтра 4 проявится полезный сигнал h(t) (t), а на интегрирующем - асинхронная помеха g(t) ) вызванная вибрацией преобразователя перемшното магнитного поля в постоянном МПЗ в рабочей полосе измере.ний ди(зшоры фиг. 2 г, д). На фиг. 2 г к 2 д наличие высокочастотной составляющей, наложенной на процессы, характеризут- щяе полезный сигнал и помеху, отражает процесс работы коммутатора синхронного фильтра, которая может &1ть сглажена фильт ром низкой частоты и не имеет существенного влияния на точность измерений, так как ее частота существенно выще частоты измеряемого поля. Следовательно, подавая процесс h(t) с дифференцирующего выхода синхроннадо фильтра 4 на регистратор 5 и индшсатор б, можно f приучить на них процесс, лйнейио связанный с измеряемым в полосе Ди переменным магнят1шм полем частоты и; . При этом юээффициент лниейной свя опрецеляется при калибровке устройства. При необходимости оденки характера и интенсивное. ти преобразователя поля в ви(Ж мости от пша движущегося носителя изме{ястельной аппаратуры и режима etx движе- вход регистратора 5 и индикатор 6 - может был подан процесс S(t) с шпегрирующего выхода фильтра 4. Регистращга и шцшкащш могут вестись либо в залоговой либо в цифровой форме с возможностью однократного яли многократного (например. „р на магнитный носитель информащд) воспроизведения впя многоцелевого анализа поля. Как следует из принципа синхронного фильтра, разде}1ение исследуемого процесса на синхронную и асинхронную относительно процесса, управляющего коммутатором фильтра, составляюдие реализуется при условии, что эти процессы являются перио ическими рассматриваемом случае азигармоническими, т. е. ЛШ«и1, Условие (4) соответствует случаю приема ;И измерения переменного магнитного поля искусственного источника, излучающего поле . |на частот Ш(например, при геофизической электроразведке связанном радаоприеме). или измерению спектральной составляющей естественного электромагнитного поля на частоте. целях геоэлектроразведки, а та1йке изученю естественных помех радиоприему в их источников на частоте передатчика. U)Q. В этих случаях результаты измерения поля сводятся либо к получению данных о детерминн
рованнмх Пространственно-временных вариациях амплитуды и фазы поля (относительно фазы искусстветного источника) либо данных о сташстике огибающей квазигармонического процесса на частоте при относителыю н ольшой ширине полосы (при измерениях поля естествейных источников).
При решении многих научных И практаческих задач методами измерений переменног магнитного поля в движении, естественное магнитное поле необходимо изучать в более Широком диапазоне частот, т. е. удовлетворяя условиям
()
и/„4Ыо и)д ,
где UJg и и;ц - .соответственно верхняя и нижняя граничные частоты диапазона. Это требование может быть удовлетворено, если частота настройки полосового , фильтра 2 И избирательного усилителя 8, равная uJg, изменяется, в пределах заданного частотного диапазона, давая возможность; дискрешо или непрерывно с заданной детальностью измерять и проводить в нем последовательный анализ гармокических составляющих поля, С этой целью в предлагаемом устройстве i может быть примшен блок 9 перестройки частоты. Перестройка частоты может осуществляться путем механического . переключения величины емкости конденсаторов в резонансных контурах фильтра 2 И избирательного усилителя 8, либо примеиешзем в этих цепях электрически управляемых конд саторов (варикапов или рарикондов). В I случае непрерывиого циклического йзменеи частоты период перестройки частоты в пределах диапазона CUg - Шц Т должен удовлетворять условию
Т RC(6)
где R -- сопротивление дифференцирующей
цепи;
С - емкость каждого из конденсаторов инте ирующей цепи синхрон ного фильтра 4.
В обоих вариантах переключения частоты на регистраторе 5 последовательно регистриг руются а на индикаторе б индицируются средаие величины огибающей спектральных составлшшщх переменного магнитиого поля . в диапазоне астот ш , по которым
может быть получен его последовательный спектр (например, при применении в регистраторе или индикаторе квадратичного детектора). Таким образом, предлагаемоеустройство при наличии периодически перестраивае-мых контуров, формирующих частотную полосу /i и в цепях преобразователя поля и вибропреобразова- еля, синхронного фильтра, регистратора и индикатора представляют собою
анализатор спектра измеряемого переменного магнитного поля, выделенный в прототипе в отдельный элемент устройства. Однако он отличается oTv последнего повышенной точностью анализа спектра поля в заданном диапазоне
частот за счет подавленияпомехи не только за его пределами, но и непосредственно на Частотах юмеряемого поля.
Технико-экономическая эффективность предлагаемого устройства заключается в повышении точности измерений переменного магнитного поля, за счет подавления помехи, вызванной вибрацией первичного преобразователя переменного магнитного поля в постоянном /магнитном поле Земли, независимо от частоты
измеряемого поля и частотного диапазона измерений.
Формула изобретения
Устройство для измерения переменного, магнитного поля, содержащее соединенньГе последовательно датчик переменного магнитного поля, полосовой фильтр, усилитель, а также регистратор, отличающееся , тем, что, с целью повышения точности, в него введены синхронный фильтр, преобразователь скорости вибрационных смещений и избирательный усилитель, причем выход уоищтеля через оШхронный фильтр подключен :К регистратору, управляющий вход синхронного фильтра через избирательный усилитель соедвне н с выходом преобразователя скорости вибрационных смещений, жжтко скрепленного с корпусом датчика переменного магнитного поля.
Источники ин;формацин,
принятые во внимание при экспертизе
Z Авторское свидетельство СССР N 452794 кл. G 01 R 33/02, 1975.
/
а
У
Х ХЛ Г
V
А
у
VX
«
7
/
