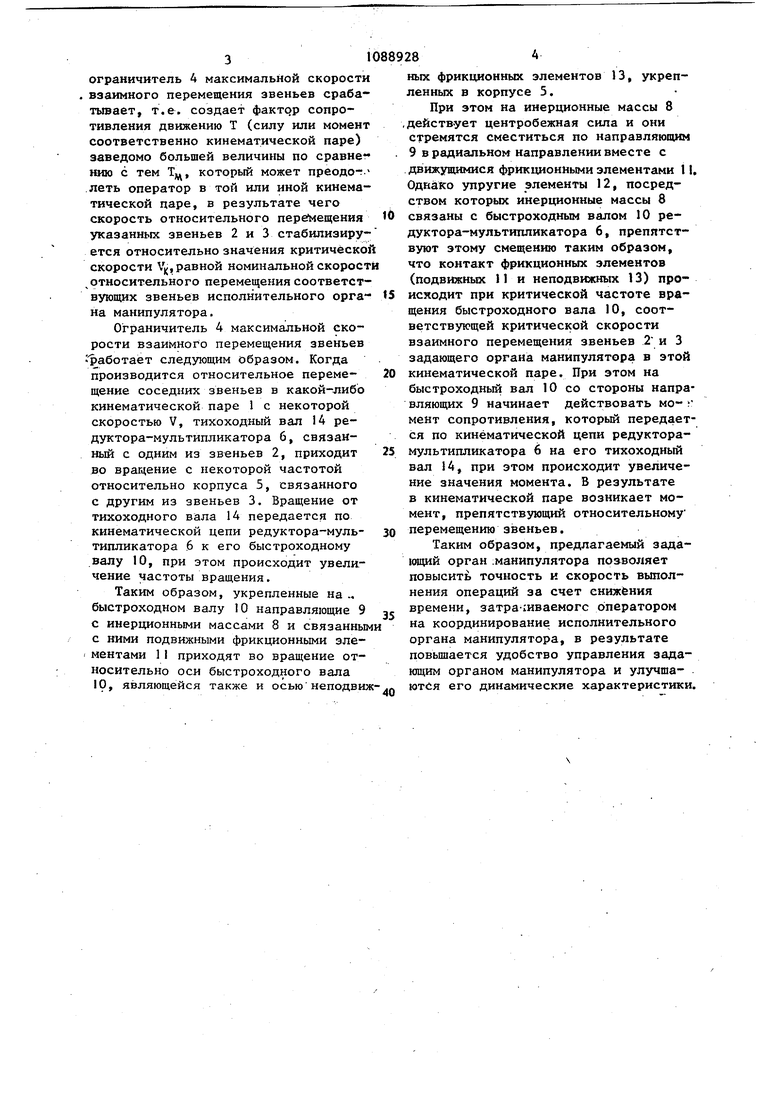
Изобретение относится к машиностроению, а именно к копирующим манипуляторам. Известен задающий орган манипулятора копирующего,типа, содержащий звенья, последовательно соединенные между собой посредством кинематических пар, и рукоятку управления jj. Недостатком известного манипулятора является рассогласование в рабо те исполнительного и задающего органов манипулятора, т.е. исполнительный орган отстает от задающего по положению во времени, вследствие чего оператор не имеет возможности уверенно и точно определить, в ка1кую точку рабочей зоны придет запоздавший исполнительный орган. Это приводит к существенному увеличени о ошибок перерегулирования и иарушению стабильного взаимодействия задающего органа манипулятора с исполнитель ным органом и устойчивой работы электрического контура управления, в результате чего возникает значительное неудобство управления, снижается уверенность управления,падает скорость и точность выполнения операций, а также,как следствие, падает производительность труда. Цель зoбpeтeния - улучшение дина мических характеристик задающего органа манипулятора и удобства управления. Поставленная цель достигается тем, что эадшоцгий орган манипулятора содержащий звенья, последовательно сое1циненные между собой посредством кинематических пар, и рукоятку управления,снабжен по числу кинематически пар ограничителями максимальной скорости взаимного перемещения звеньев, выполненными каждый в виде корпуса, редуктора-мультипликатора и цеитробежно-фрикционного регулятора частоты вращения, имеющего инерционные массы и подвижные и неподвижные фрик ционные элементы, причем неподвижиые фрикционные элементы связаны с корпусом, а подвижные - с ияердиоиными массами центробежно-фрикционного регулятора, которые посредством дополнительно введенных упругих элемен тов связаны с быстроходным валом редуктора-мультипликатора, тихоходный вал которого соединен с одним звеном пары, а второе звено этой пары связано с корпусом. 1 282 На фиг.1 изображена кинематическая схема задающего органа манипулятора; на фиг.2 - кинематическая схема вращательной пары задающего органа манипулятора; на фиг.З - кинематическая схема поступательной пары задающего органа манипулятора; на фиг.4 график зависимости сопротивления движению от скорости относительного перемещения соседних звеньев задакицего органа манипулятора; на фиг.З - ограничитель максимальной скорости взаимного перемещения соседних звеньев задающего органа манипулятора; на фиг.6 - разрез А-А на фиг.5. Задающий орган манипулятора имеет в каждой кинематической паре 1, соединяющей соседние звенья 2 и 3,. ограничитель 4 максимальной скорости взаимного перемещения звеньев. Ограничитель 4 максимальной скорости взаимного перемещения звеньев выполнен в виде корпуса 5, редуктора-мультипликатора 6 и цеитробежно-фрикционного регулятора 7 частоты вращения, имеющего инерционные массы 8, установленные с возможностью радиального . перемещения в направляющих 9, закрепленных .иа быстроходном валу 10 редуктора-мультипликатора 6, неподвижно установленного в корпусе 5. Йнерциоонные массы 8 связаны с подвижными фрикционными элементами 1 1 и соедине ны с быстроходным валом IО редукторамультипликатора 6 посредством упругих элементов 12. Напротив подвижных фрикционных элементов 11 в корпусе 5 закреплены неподвижные фрикционные элементы 13, например кольцо. Корпус 5жестко связан .со звеном 3. Тихоходный вал 14 реду1 тора-мультипликатора 6соединен со звеном 2. Зад иощий орган манипулятора работает следующим образом. Когда оператор воздействует на задающий орган манипулятора и производит относительное перемещение соседних звеньев 2 и 3 в какой-либо кинематической паре 1 с некоторой скоростью V, меньшей критической V|, равной номинальной скорости относительного перемещения соответствующих звеньев исполнительного органа манипулятора, ограничитель 4 максимальной скорости взаимного перемещения звеньев не работает, т.е. не создает сопротивления движению. Когда скорость V становится равной VK, ограничитель 4 максимальной скорости . взаимного перемещения звеньев срабатывает, т.е. создает фактор сопротивления движению Т (силу или момент соответственно кинематической паре) заведомо большей величины по сравнешоо с тем Т;, который может преодо-г. леть оператор в той или иной кинематической паре, в результате чего скорость относительного пере нещения указанных звеньев 2 и 3 стабилизируется относительно значения критической скорости V|, равной номинальной скорост относительного перемещения соответствующих звеньев исполнительного органа манипулятора. Ограничитель 4 максимальной скорости взаимного перемещения звеньев работает следующим образом. Когда производится относительное перемещение соседних звеньев в какой- либо кинематической паре 1 с некоторой скоростью V, тихоходный вал 14 редуктора-мультипликатора б, связанный с одним из звеньев 2, приходит во вращение с некоторой частотой относительно корпуса 5, связанного с другим из звеньев 3. Вращение от тихоходного вала 14 передается по кинематической цепи редуктора-мультипликатора .6 к его быстроходному валу 10, при этом происходит увеличение частоты вращения. Таким образом, укрепленные на ., быстроходном валу 10 направляющие 9 с инерционными массами 8 и связанным с ними подвижными фрикционными зле. ментами 11 приходят во вращение относительно оси быстроходного вала 10, являющейся также и осьюнеподвиж ных фрикционных элементов 13, укрепленных в корпусе 5. При этом на инерционные массы 8 действует центробежная сила и они стремятся сместиться по направляющим 9 в радиальном направлении вместе с движущимися фрикционными элементами 11. Однако упругие элементы 12, посредством которых инерционные массы 8 связаны с быстроходным валом 10 редуктора-мультипликатора 6, препятствуют этому смещению таким образом, что контакт фрикционных элементов (подвижиьос И и неподвижных 13) происходит при критической частоте вращения быстроходного вала 10, соответствующей критической скорости взаимного перемещения звеньев 2 и 3 задающего органа манипулятора в этой кинематической паре. При этом иа быстроходный вал 10 со стороны направляющих 9 Начинает действовать мо- ; мент сопротивления, который передается по кинематической цепи редукторамультипликатора 6 на его тихоходный вал 14, при этом происходит увеличение значения момента. В результате в кинематической паре возникает момент, препятствующий относительному перемещению звеньев. Таким образом, предлагаемый задающий орган :манипулятора позволяет повысить точность к скорость выполнения операций за счет снижения времени, затра-;иваемогс оператором на координирование исполнительного органа манипулятора, в результате повьщ1ается удобство управления задающим органом манипулятора и улучшаютйя его динамические характеристики.
4j I
. LHjE
7-.Jr--T:i
«
V////7//////7/A
3 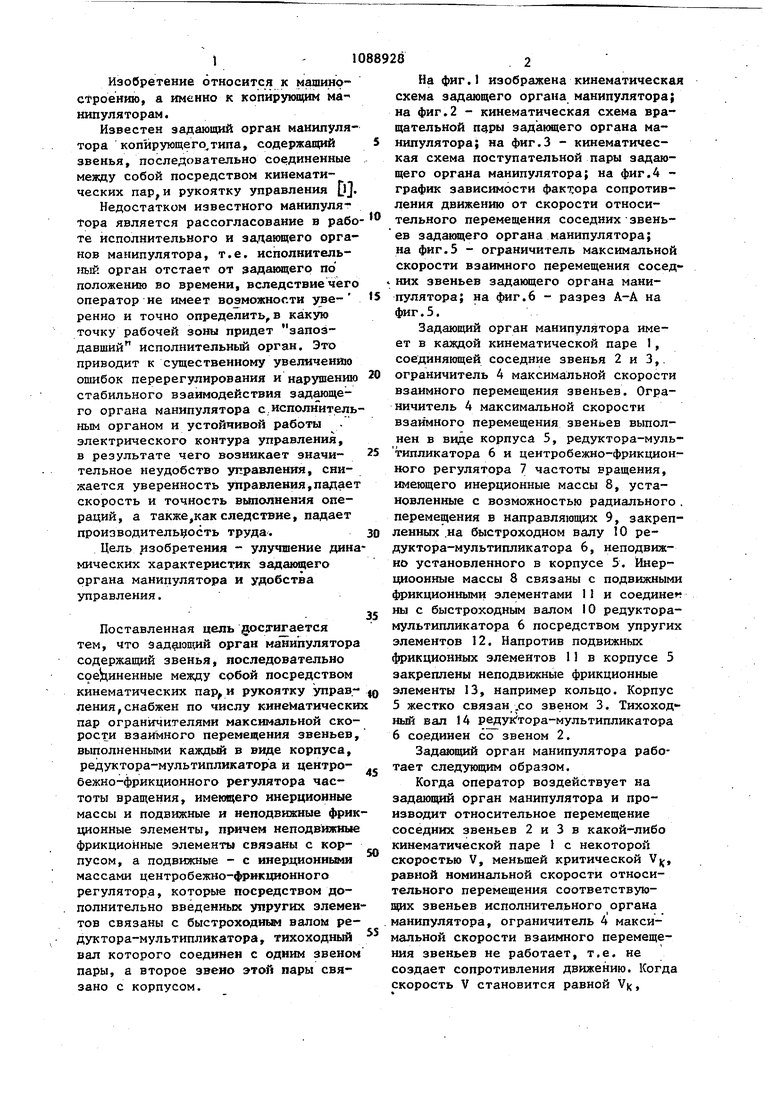
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1995 |
|
RU2075637C1 |
| ГЕНЕРАТОР-МУЛЬТИПЛИКАТОР ДЛЯ ПИТАНИЯ ЗАБОЙНОЙ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ | 2002 |
|
RU2215139C1 |
| СТАТОРНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 2017 |
|
RU2654656C1 |
| СИНХРОННЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579756C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2030082C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1995 |
|
RU2075639C1 |
| РЕДУКТОР ОРБИТАЛЬНЫЙ (ВАРИАНТЫ) | 2008 |
|
RU2380595C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2629003C2 |
| СООСНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579443C2 |
| СПОСОБ РАБОТЫ СИЛОВОГО ПРИВОДА ВРАЩЕНИЯ И ЭЛЕКТРОСТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377458C2 |
ЗАДАЮЩИЙ ОРГАН МАНИПУЛЯТОРА, содержап1ий звенья, последовательно соединенные между собой посредством кинематических пар, и рукоятку управ ления, о т 71 и ч а ю щ и и с я тем, 4TOj с целью улучшения динамических характеристик и удобства управления, он снабжен по числу кинематических пар ограничителями максимальной скорости взаимного перемегдекия звеньев, выполненными каждьШ в виде корпуса, редуктора-мультипликатора и центробежно-фрикционного регулятора частоты вращения, имеющего инерционные массы и подвижные и неподвижные фрикционные элементы, причем неподвижные фрикционные элементы связаны с корпу-г сом, а подвижные - с инерционными массами центробежно-фрикционного ре гулятора, которые посредством дополнительно введенных упругих элементов связаны с быстроходным валом редуктора-мультипликатора, тихоходный вал которого соединен с одним звеном, пары, а второе звено этой пары связг но с корпусом.
A
a
/:
fPV8, 3
В
99 10 12 в
9
Физ. в
| I | |||
| Патентам | |||
| N 4160508, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
