Изобретение относится к электрическим машинам, в частности к электродвигателям, и может быть использовано для приводов дозаторов, клапанов, задвижек и регулируемых вентилей.
Из технической литературы известен электродвигатель, содержащий установленный в корпусе статор, установленный внутри него ротор, связанный с выходным валом.
Недостатком данного двигателя является низкая надежность, а также низкие динамические возможности.
Наиболее близким к предложенному является электродвигатель, содержащий установленный в корпусе статор, выполненный в виде магнитопроводов с обмоткой, и ротор с магнитом, эксцентрично установленный внутри статора и связанный с выходным валом посредством муфты, а со статором - кинематической парой (1).
Недостатком этого двигателя является низкая надежность, а также значительные динамические перегрузки и невозможность работы "на упор".
Целью изобретения является повышение надежности и улучшение статических и динамических характеристик.
Указанная цель достигается тем, что магнит ротора выполнен в виде двух радиальных магнитов, установленных на противоположных концах по оси ротора, причем полюса первого магнита расположены противоположно полюсам второго магнита.
Кроме того, указанная цель достигается тем, что кинематическая пара может быть выполнена в виде фрикционной и зубчатой передач.
Сопоставительный анализ с прототипом показывает, заявленное устройство отличается от него выполнением магнита ротора, что позволяет сделать вывод о соответствии критерию "новизна".
Сравнение предложенного технического решения не только с прототипом, но и с устройствами данной области техники не позволило выявить в них признаки, отличающие его от прототипа, что позволяет сделать вывод о соответствии критерию "изобретательский уровень", поскольку оно для специалиста явным образом не следует из уровня техники.
Предложенное техническое решение может быть использовано в широком круге устройств в промышленности, поэтому оно соответствует критерию "промышленная применимость".
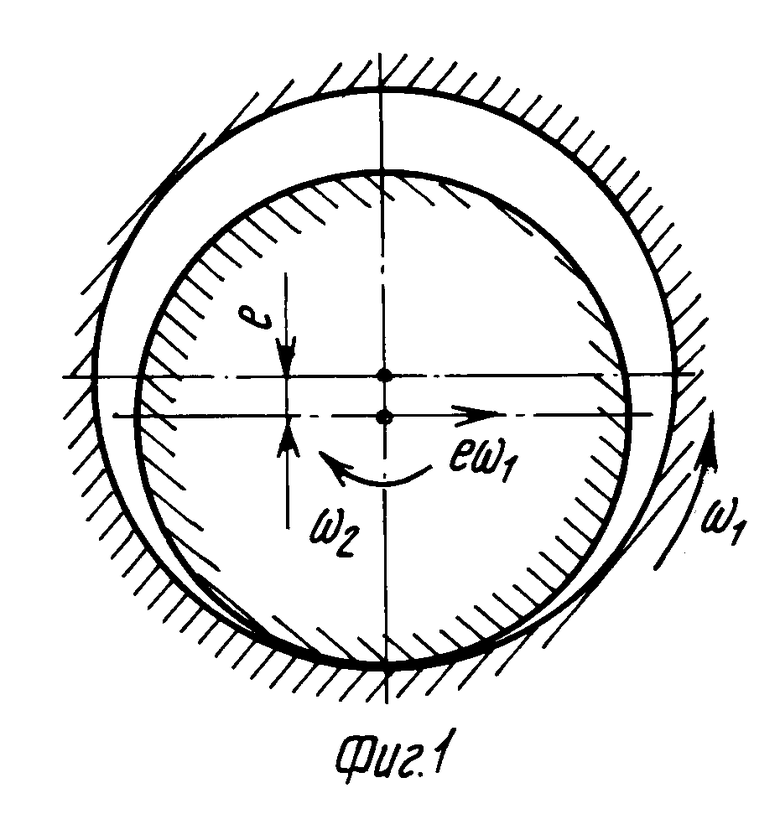
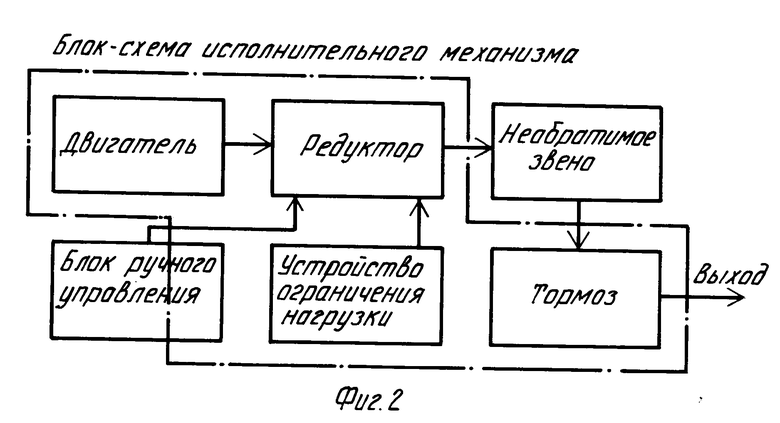
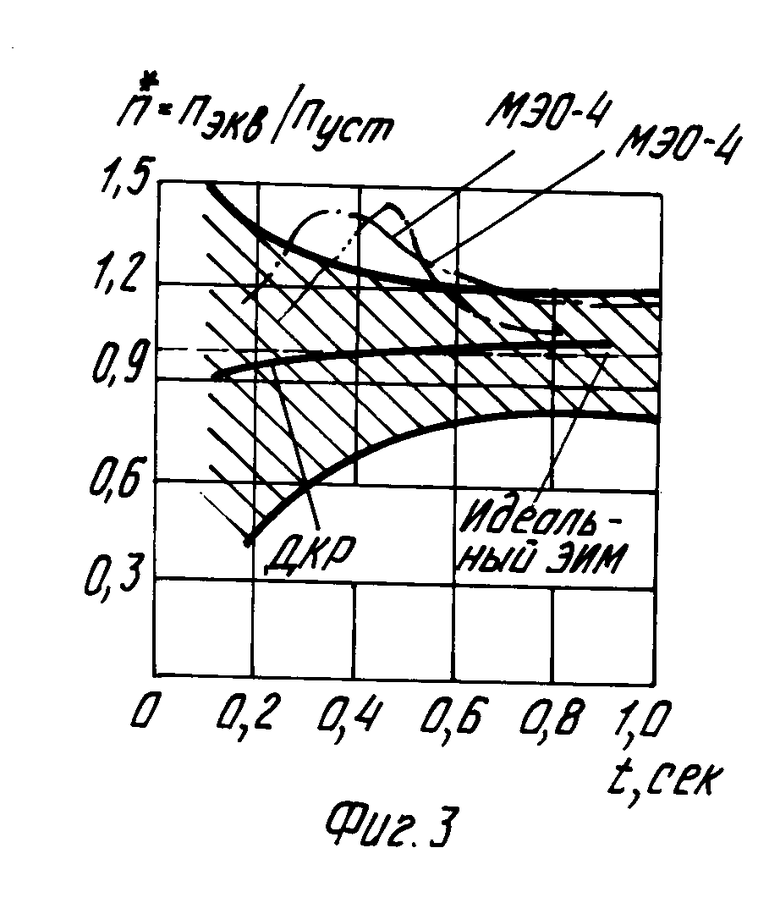
На фиг. 1 дана принципиальная схема электродвигателя; на фиг. 2 - вариант схемы установки электродвигателя в электрическом исполнительном механизме; на фиг. 3 - динамические характеристики электродвигателя и исполнительных механизмов типа МЭО-4, выполненных на базе быстроходных электродвигателей; на фиг. 4 - конструктивная схема электродвигателя.
Электродвигатель содержит установленный в корпусе (не показан) статор, выполненный в виде магнитопроводов 1 с обмоткой 2, и ротор 3, который эксцентрично установлен в статоре и связан с выходным валом (не показан) посредством муфты (не показана), а со статором - кинематической парой (не показана). На противоположных концах по оси ротора 3 установлены радиальные магниты 4 и 5, причем полюса магнита 4 расположены противоположно полюсам магнита 5.
Работает электродвигатель следующим образом.
Под действием вращающейся электромагнитной силы, создаваемой полем рабочего зазора (см. фиг. 1), ротор 3 перемещается в статоре (поступательно) так, что его ось описывает относительно оси статора окружность малого радиуса e. Одновременно, находясь в кинематической связи со статором, ротор 3 медленно поворачивается вокруг своей оси, при этом скорость определяется частотой питающей сети и параметрами кинематической пары. Вращательное движение является рабочим и передается на выходной вал с помощью муфты.
Благодаря низкой скорости вращения и малому эксцентриситету e суммарная кинематическая энергия ротора в сложном движении (поступательном с малой линейной скоростью е ω1 и вращательном с малой угловой скоростью ω2 существенно (в 100-10000 раз) меньше кинетической энергии ротора той же массы обычной машины, вращающегося с большой скоростью ω1.
Предложенный электродвигатель обладает следующими преимуществами.
Высокая надежность, поскольку в нем отсутствуют элементы конструкции, перемещающиеся с большой скоростью, повышает работоспособность и надежность машины. При использовании данного электродвигателя в тихоходных электрических исполнительных механизмах (ЭИМ) редуктор может быть либо вообще исключен, либо существенно упрощен (1-2 тихоходных ступени). Быстродействие и точность благодаря малой кинетической энергии ротора, электродвигатель черезвычайно быстро и точно отрабатывает сигналы, т.е. он обладает хорошими динамическими характеристиками. Возможность частых пусков и реверсов, поскольку малоинерционность ротора способствует существенному снижению кратности и продолжительности пускового тока, тока реверса и, следовательно, перегрева двигателя в переходных режимах, что позволяет эффективно применять электродвигатель в устройствах, в которых по условиям работы необходимо часто изменять режим. Малый выбег при отключении питающей сети, ротор останавливается за время, не превышающее 0,01-0,02 с, благодаря этому свойству из конструкции ЭИМ может быть исключено тормозное устройство при одновременном снижении выбега.
Снижение динамических перегрузок, поскольку малая кинетическая энергия ротора позволяет с одной стороны эффективно управлять величиной момента двигателя, например, при открывании вентиля, а с другой - значительно снизить динамические перегрузки механизма и арматуры при подходе к крайним положениям или при внезапной остановке. Ток, потребляемый двигателем в этих режимах, увеличивается всего на 15 - 30% по сравнению с номинальным значением. Отмеченные свойства говорят о возможности работы "на упор", причем необходимость в устройстве ограничения нагрузки отпадает.
Соответствие скорости и момента электродвигателя условиям ручного управления, отсутствие тормоза позволяют значительно упростить блок ручного управления, исключив из него дополнительную зубчатую передачу, муфту переключения на ручное управление и рычаг ослабления магнитного тормоза. Для ручного регулирования необходимо лишь присоединить рукоятку управления к валу со стороны, противоположной присоединению нагрузки.
Таким образом, электродвигатель, совмещая свойства ряда узлов (см. фиг. 2), позволяет существенно упростить конструкцию ЭИМ, повысить его надежность, значительно улучшить характеристики.
На фиг. 3 приведены динамические характеристики электродвигателя и исполнительных механизмов типа МЭО-4, выполненных на базе быстроходных электродвигателей. По оси ординат отложены (в относительных единицах) значения скорости выходного вала η* , средние за период прохождения кратковременного управляющего импульса (длительностью t). Как следует из приведенных графиков зависимости, характеризующих быстродействие электродвигателя, это наибольшей мере удовлетворяет требованиям ГОСТ на исполнительные механизмы (заштрихованная зона).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ДВИГАТЕЛЬ | 2008 |
|
RU2371827C1 |
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| Синхронный электродвигатель | 1979 |
|
SU855880A1 |
| ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2290328C1 |
| СПОСОБ ЗАЩИТЫ ОТ ВОЗГОРАНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ КОЛЛЕКТОРНОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2567230C1 |
| Магнитоэлектрический двигатель | 1980 |
|
SU1103328A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2195066C2 |
| Однофазный шаговый электродвигатель | 1985 |
|
SU1367109A1 |
| МЕХАТРОННОЕ УСТРОЙСТВО | 2013 |
|
RU2543522C2 |
Использование: в электромашиностроении, в частности в качестве электропривода дозаторов, клапанов, задвижек и регулируемых вентилей. Сущность изобретения: электродвигатель с катящимся ротором содержит статор с магнитопроводами 1 и обмоткой 2, в котором эксцентрично установлен ротор 3. Ротор 3 выполнен в виде магнитопровода, на противоположных концах которого установлены радиально намагниченные дисковые магниты 4 и 5. Намагниченность магнита 4 противоположна намагниченности магнита 5. Такая конструкция ротора позволяет уменьшить его момент инерции и улучшить статические и динамические характеристики двигателя. 2 з.п. ф-лы, 4 ил.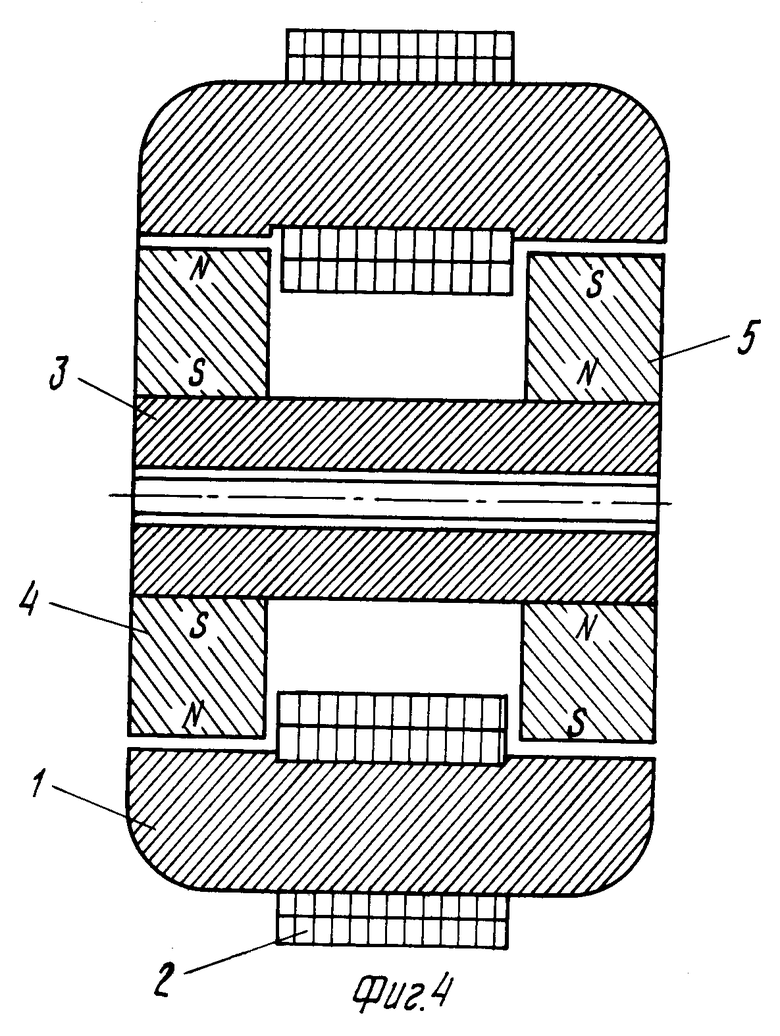
| Тракторный путепереукладчик | 1985 |
|
SU1231097A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
