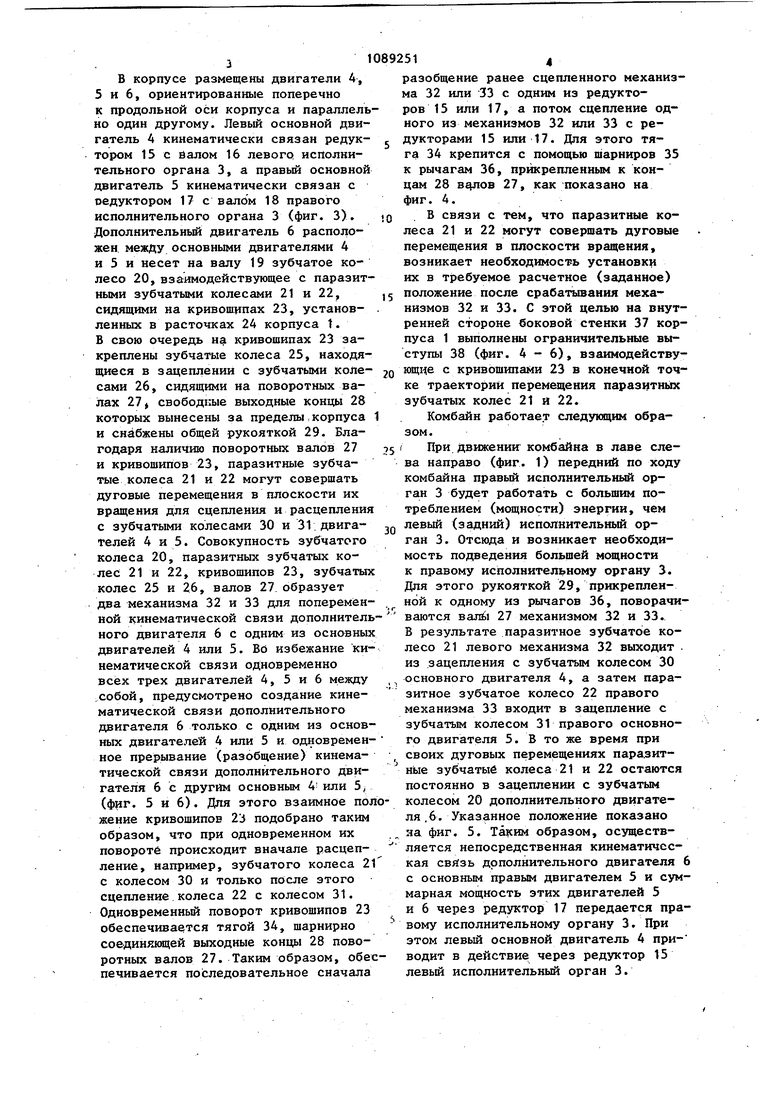
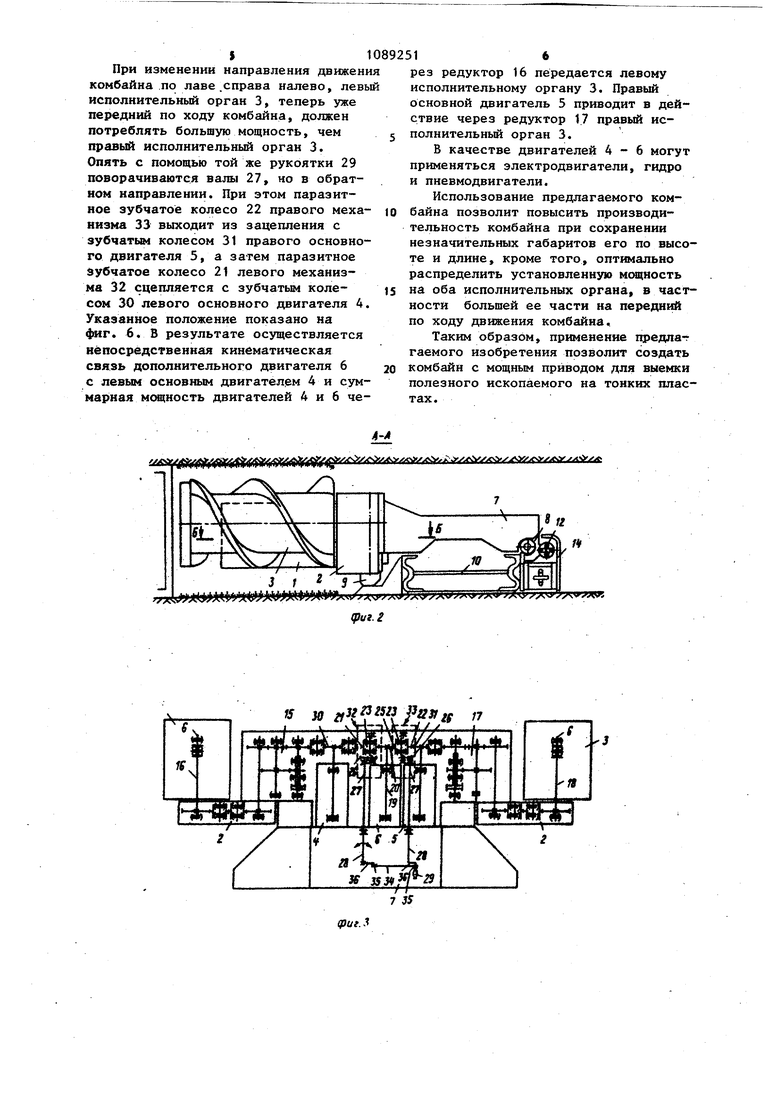
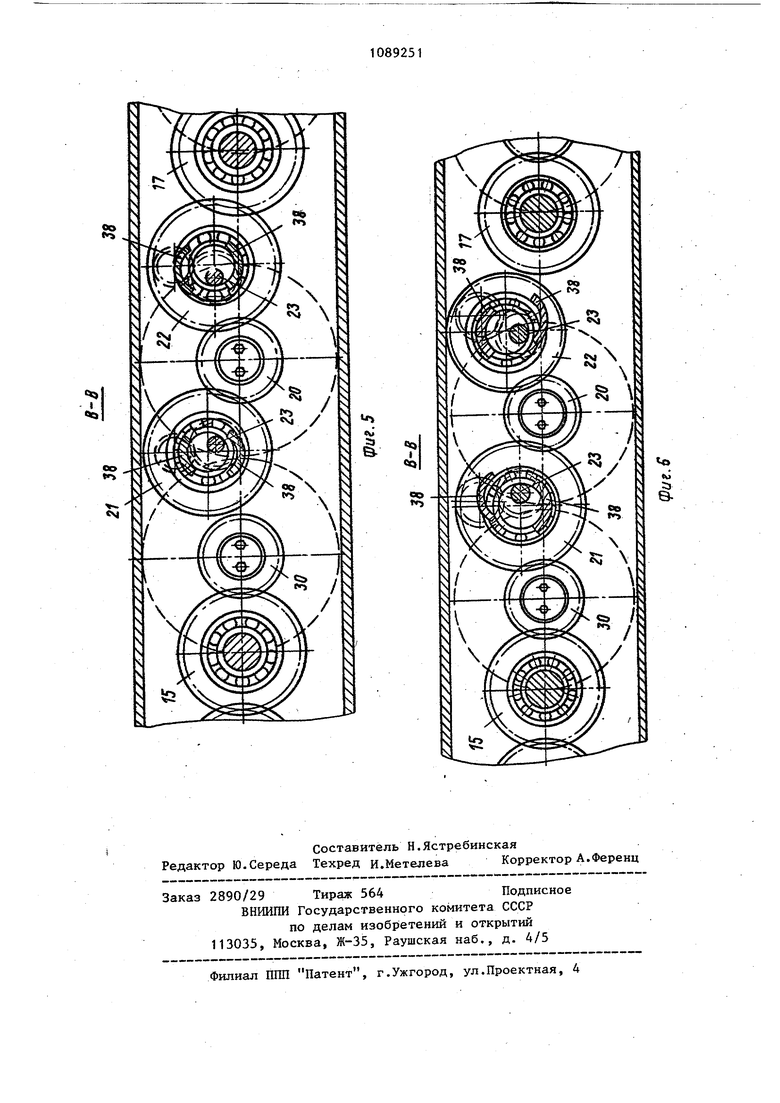
Изобретение относится к средствам для механизации выемки, а именно к бчистным комбайнам с двумя шнековы.ми исполнительными органами, предназначенным для механизации выемки угля, главным образом, на тонких пла тах. Известны комбайны для выемки угля включающие исполнительные органы в виде барабанов, установленных на поворотных рукоятях, расположенных по концам корпуса комбайна. Каждый исполнительный орган приводится в действие двигателем, расположенным внут ри рукояти Ct 3. Недостатком известного комбайна является то, что необходимо применят двигатели большой мощности, так как двигатели кинематически не связаны между .собой, что приводит к нерациональному расходу энергии. Наиболее близким к предлагаемому является очистной комбайн, включающий шнековые исполнительные органы, каждый из которых установлен на регу лируемой рукояти иразмещен по концам корпуса, в котором размещены два двигателя 02. Недостатком указанного комбайна является то, что мощность двигателей нерационально расходуется, так как в случае использования двигателей большей мощности, энергия подводимая к одному исполнительному органу, который является вторым по ходу движения комбайна, расходуется неполностью. Использование же двигателей с малой мощностью не позволит в достаточной степени обеспечить энергией первый по ходу комбайна исполнительный орган, что и не позволит обеспечить необходимую производительность комбайна. Кроме того, использование двигателей большой мощности невозможно в тонких пластах, о Цель изобретения - повышение производительности комбайна. Указанная цель достигается тем, что, очистной комбайн, включающий Шнековые исполнительные органы, каждый из которых размещен на регулируе мой рукоятке и размещен по концам корпуса, в котором размещены два дви гателя, кинематически связанные посредством редукторов со шнековыми исполнительными органами, снабжен дополнительным двигателем и зубчатой передачей, размещенными между основными двигателями, и двумя механизмами для попеременной кинематической связи дополнительного двигателя с одним из основных двигателей. Каждый механизм для попеременной кинематической связи дополнительного двигателя с одним из основных двигателей выполнен в виде кривошипа с укреш1ен1шми на нем зубчатыми колесами и вала, один конец которого выведен из корлуса, при этом выведенffirfe из корпуса концы каждого вала соединены между собой посредством рычагов, шарнирно связанных тягой с рукояткой. . Основные и дополнительные двигатели расположены в одной плоскости относительно корпуса комбайна и параллельно друг другу. На фиг. 1 изображен предлагаемый комбайн (общий вид) и система подачи; на фиг. 2 - поперечное сечение А-А на фиг. 1; на фиг. 3 - кинематическая схема комбайна; на фиг. 4 - сечение В-Б на фиг. 2; на фиг. 5 - сечение В-В на фиг. 4, показывакяцее кинематическую связь дополнительного двигателя с правым основш 1м двигателем при разобщенной кинематической связи с левым основным двигателем; на фиг. 6 - то же, показывающее кинематическую связь дополнительного двигателя с левым основным двигателем при разобщенной кинематической связи с правым основным двигателем. Комбайн имеет корпус 1 (фиг. 1) с поворотными рукоятками 2, несущими шнековые исполнительные органы 3 для отбойки ископаемого, которые получают вращения от двигателей 4, 5 и 6, находящихся внутри корпуса 1. Корпус 1 несет портальную раму 7 (фи. и 2) с захватами 8 и гидравлические опоры 9, посредством которых комбайн опирается на лавный конвейер 10. Комбайн может быть выполнен и без портальной рамы. Комбайн может перемещаться относительно конвейера с помощью различной конструкции механизма 1 1 подачи. Как видно на фиг. 1 и 2, в качестве такого механизма используется вынесенная система подачи, включающая тяговьй гибкий, орган 12 (цепь), соединяемый с портальной рамой 7 и с двумя Ьриводами 13, выносимыми из очистного забоя на штрек. Цепь 12 укладывается в елобе 14 на борт лавного конвейера 10. В корпусе размещены двигатели 4, 5 и 6, ориентированные поперечно к продольной оси корпуса и параллель но один другому. Левый основной двигатель 4 кинематически связан редуктором 15 с йалом 16 левогр исполнительного органа 3, а правый основной двигатель 5 кинематически связан с оедуктором 17 с валом 18 правого исполнительного органа 3 (фиг. 3). Дополнительный двигатель 6 расположен между основными двигателями 4 и 5 и несет на валу 19 зубчатое колесо 20, взаимодействующее с паразитными зубчатыми колесами 21 и 22, сидящими на кривошипах 23, установленных в расточках 24 корпуса t. В свою очередь HSI кривошипах 23 закреплены зубчатые колеса 25, находящиеся в зацеплении с зубчатыми колесами 26, сидящими на поворотных валах 27) свободные выходные концы 28 которых вынесены за пределы,корпуса и снабжены общей рукояткой 29. Благодаря наличию поворотных валов 27 и кривошипов 23, паразитные зубчатые колеса 21 и 22 могут совершать дуговые перемещения в плоскости их вращения для сцепления и расцепления с зубчатыми колесами 30 и 31 двигателей 4 и 5. Совокупность зубчатого колеса 20, паразитных зубчатых колес 21 и 22, кривошипов 23, зубчатых колес 25 и 26, валов 27 образует два механизма 32 и 33 для поперемённой кинематической связи дополнитель кого двигателя 6 с одним из основных двигателей 4 или 5. Во избежание кинематической связи одновременно всех трех двигателей 4, 5 и 6 между .собой, предусмотрено создание кинематической связи дополнительного двигателя 6 только с одним из основных двигателей 4 или 5 и одновременное прерывание (разобщение) кинематической связи дополнительного двигателя 6 с другим основным 4 или 5, (. 5 и 6). Для этого взаимное пол жение кривошипов 23 подобрано таким образом, что при одновременном их повороте происходит вначале расцепление, например, зубчатого колеса 2 с колесом 30 и только после этого сцепление колеса 22 с колесом 31. Одновременный поворот кривошипов 23 обеспечивается тягой 34, шарнирно соединяющей выходные концы 28 поворотных валов 27. Таким образом, обе печивается последовательное сначала разобщение ранее сцепленного механизма 32 или 33 с одним из редукторов 15 или 17, а потом сцепление одного из механизмов 32 или 33 с редукторами 15 или 17. Для этого тяга 34 крепится с помощью шарниров 35 к рычагам 36, прикрепленным к концам 28 ВФ10В 27, как показано на фиг. 4. В связи с тем, что паразитные колеса 21 и 22 могут совершать дуговые перемещения в плоскости вращения, возникает необходимость установки их в требуемое расчетное (заданное) положение после срабатывания механизмов 32 и 33. С этой целью на внутренней стороне боковой стенки 37 корпуса 1 выполнены ограничительные выступы 38 (фиг. 4-6), взаимодействующце с кривошипами 23 в конечной точке траектории перемещения паразитных зубчатых колес 21 и 22. Комбайн работает следующим образом. При движении комбайна в лаве слева направо (фиг. 1) передний по ходу комбайна правый исполнительный орган 3 будет работать с большим потреблением (мощности) энергии, чем левый (задний) исполнительный орган 3. Отсюда и возникает необходимость подведения большей мощности к правому исполнительному органу 3. Для этого рукояткой 29, прикрепленной к одному из рычагов 36, поворачиваются 27 механизмом 32 и 33. В результате паразитное зубчатое колесо 21 левого механизма 32 выходит . из зацепления с зубчатым колесом 30 основного двигателя 4, а затем паразитное зубчатое колесо 22 правого механизма 33 входит в зацеппениё с зубчатым колесом 31 правого основного двигателя 5. В то же время при своих дуговых перемещениях паразитные зубчатые колеса 21 и 22 остаются постоянно в зацеплении с зубчатым колесом 20 дополнительного двигателя, 6. Указанное положение показано на фиг. 5. Таким образом, осуществляется непосредственная кинематическая свйзь дополнительного двигателя 6 с основным правым двигателем 5 и суммарная мощность этих двигателей 5 и 6 через редуктор 17 передается правому исполнительному органу 3. При этом левый основной двигатель 4 приводит в действие через редуктор 15 левый исполнительный орган 3.
При изменении направления движени комбайна по лаве .справа налево, левы исполнительный орган 3, теперь уже передний по ходу комбайна, должен потреблять большую мощность, чем правый исполнительный орган 3. Опять с помощью той же рукоятки 29 поворачиваются валы 27, но в обратном направлении. При этом паразитное зубчатое колесо 22 правого механизма 33 выходит из зацепления с зубчатым колесом 31 правого основного двигателя 5, а затем паразитное Зубчатое колесо 21 левого механизма 32 сцепляется с зубчатым колесом 30 левого основного двигателя А. Указанное положение показано на фиг. 6. В результате осуществляется непосредственная кинематическая связь дополнительного двигателя 6 с левым основным двигател ем 4 и суммар|Ная мощность двигателей 4 и 6 через редуктор 16 передается левому исполнительному органу 3. Правый основной двигатель 5 приводит в действие через редуктор 17 правый исполнительный орган 3.
В качестве двигателей 4-6 могут применяться электродвигатели, гидро и пневмодвигатели.
Использование предлагаемого комбайна позволит повысить производительность комбайна при сохранении незначительных габаритов его по высоте и длине, кроме того, оптимально распределить установленную мсщность
на оба исполнительных органа, в частности большей ее части на передний по ходу движения комбайна.
Таким образом, применение предла-г гаемого изобретения позволит создать
комбайн с мощным приводом для выемки полезного ископаемого на тонких пластах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРНЫЙ ОЧИСТНОЙ КОМБАЙН | 1993 |
|
RU2065959C1 |
| Привод выемочного комбайна | 1983 |
|
SU1133393A1 |
| Комбайн очистной | 1984 |
|
SU1208224A1 |
| ОЧИСТНОЙ КОМБАЙН ДЛЯ ТОНКИХ ПЛАСТОВ УГЛЯ | 1989 |
|
RU2016194C1 |
| ГОРНЫЙ КОМБАЙН | 2002 |
|
RU2234600C2 |
| Очистной комбайн | 1987 |
|
SU1530768A1 |
| ПЛАНЕТАРНО-ШНЕКОВЫЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1993 |
|
RU2067172C1 |
| КОМБАЙН | 1992 |
|
RU2057930C1 |
| РАБОЧИЙ ОРГАН ГОРНОГО ОЧИСТНОГО КОМБАЙНА | 1993 |
|
RU2066756C1 |
| Очистной челноковый комбайн | 1974 |
|
SU618549A1 |
1. ОЧИСТНОЙ КОМБАЙН, вК1Ш инций шнековые исполнительные орган каждый из которых установлен на ре пируемой рукоятке и размещен по ко цам корпуса, в котором размещены д двигателя, кинематически связанные посредством редукторов со шнековым исполнительными органами, о тли чающийся тем, что, с целью повышения производительности, он снабжен дополнительным двигателем и зубчатой передачей, размещенными между основными двигателями, и двумя механизмами для попеременной кинематической связи дополнительного двигателя с одним из основных двига- . телей. 2.Комбайн по п. 1, о т л и ч а ющ и и с я тем, что каждый механизм для попеременной кинематической свя аи дополнительного двигателя с одним из основных двигателей выполнен в виде кривошипа с укрепленными на нем зубчатыми колесами и вала, один конец которого вьшеден из корпуса, при этом выведенные из корпуса концы каждого вала соединены между собой посредством рычагов, шарнирно связанных тягой с рукояткой. 3.Комбайн по п. 1, о т л и ч а ющ и и с я тем, что основные и дополнительный двигатели расположены в одной плоскости относительно корпуса комбайна и параллельно друг другу.
X { IfjlJfy /7 I 1 /у I
-
cu
5s
S
«о
vi
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящий привод | 1982 |
|
SU1060821A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Автоматический сцепной прибор американского типа | 1925 |
|
SU1959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очистной узкозахватный комбайн | 1975 |
|
SU567352A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
