/«
V
§
6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения абсолютного отклонения частоты | 1982 |
|
SU1205050A1 |
| Способ измерения ускорения | 1979 |
|
SU838588A1 |
| Устройство для регулирования скорости вращения электродвигателя | 1981 |
|
SU955471A1 |
| ИЗМЕРИТЕЛЬ МАЛЫХ ФЛУКТУАЦИИ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1973 |
|
SU407270A1 |
| Способ измерения временных интервалов | 1977 |
|
SU980062A1 |
| Способ измерения частоты импульсных сигналов и устройство для его осуществления | 1984 |
|
SU1250976A1 |
| Способ измерения частоты | 1984 |
|
SU1228029A1 |
| Способ измерения временных процессов в образцах | 1990 |
|
SU1829007A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ | 2009 |
|
RU2399923C1 |
| Способ измерения отношения сигнал/шум | 1987 |
|
SU1474564A1 |
СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ, основанный на сравнении временных интервалов между одинаковыми -по порядку с начала измерения импульсами эталонной и измеряемой частот в начале и в конце измерения, отличающийся тем, что, с целью расширения диапазона измеряемых частот при сохранении точности измерения, начальный интервал формируют равным наибольшему ожидаемому суммарному отклонению периодов измеряемой частоты за время измерения.
Л
со
00
со
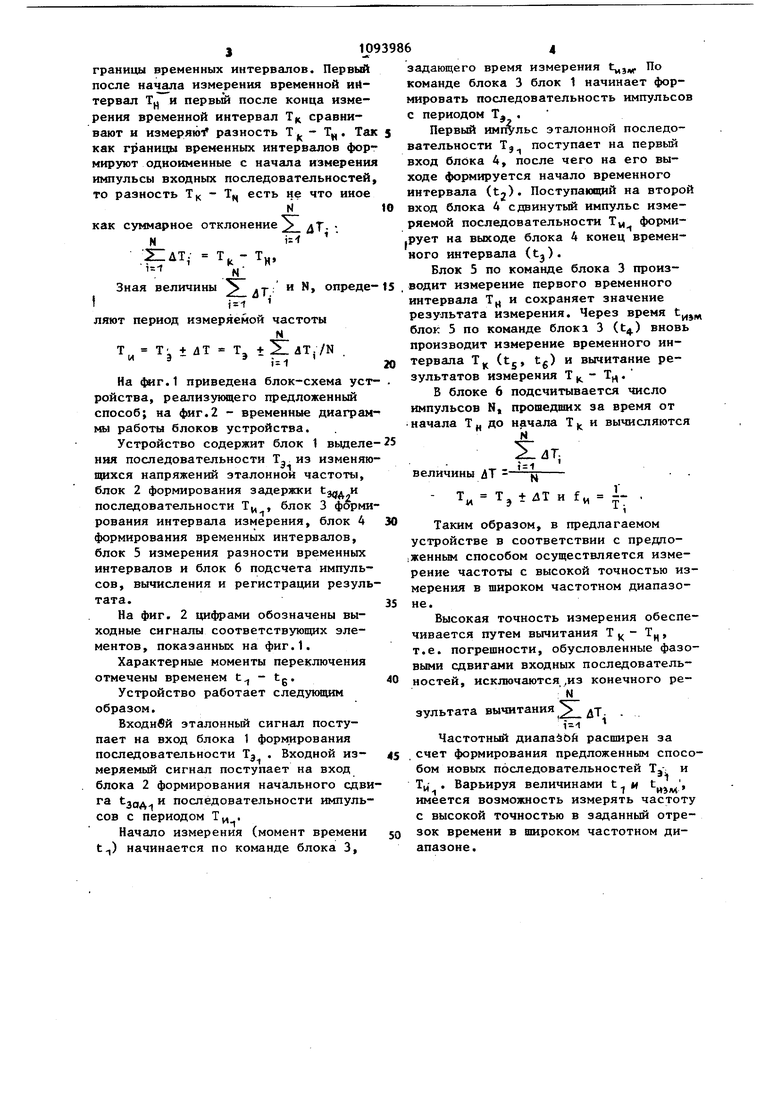
00 О) Изобретение относится к измерительной технике и предназначено для измерения частоты высокостабильных генераторов опорных колебаний. Известен способ косвенного измере НИЛ частоты высокостабильных генераторов опорных колебаний, например способ измерения частоты, основанньА на измерении относительной разности фаз по эталонным сигналам в начале и конце фиксированного временного интервала с последующим расчетом частотной поправки, причем измеренны сигнал преобразуют в опорньй сигнал и формируют скорректированный сигнал в виде разности измеренного и опорно го сигналов. Скорректированный сигна используется либо для непосредственного определения веса фпуктуационной составляющей ухода временных шкал, либо для определения той части измеренного сигнала, которая определяется систематической составляющей уходов С1}. Способ позволяет определять уход частоты контролируемого генератора путем непосредственного измерения разности фаз между сигналами опорног и контролируемого гейераторов. Одна ко с увеличением частоты следования сравниваемых сигналов снижается точность измерения фаз, что приводит соответственно к снижению точности измерения частоты контролируемого генератора, т.е. данный способ при1меним для измерения частоты генераторов, выдаюоцос сигналы с низкой частотой следования. Известен способ измерения частотных флуктуации высокостабильных гене- 40 сов раторов, согласно которому сравниваю временные интервалы между одинаковыми по порядку с начала измерения импульсами эталонной и измеряемой частот и по значениям разностей смежных измерений определяют частотные флуктуации расчетн1 { путем Г2 } Известньй способ позволяет вести измерение частоты сигнала по отклонению частоты сигнала от эталонной. Однако диапазон измеряемых частот относительно узкий. Цель изобретения - расширение диапазона измеряемых частот при сохранении точности измерения. Поставленная цель достигается тем, что согласно способу измерения частоты, основанному на сравнении временных интервалов между одинаковыми по порядку с начала измерения импульсами эталонной и измеряемой частот в начале и в конце измерения, начальный интервал формирует равным наибольше9|у ожидаемому суммарному отклонению периодов измеряемой частоты за время измерения. С цность способа заключается в следукицем. Из изменяхщихся напряжений зталонной fy и измеряемой „ частот формируют последовательности импульсов соответственно с периодами следованияi;HT, j- T, idT. Из сформированных импульсов эталонной и измеряемой последовательностей с начала измерения формируют нотаые последовательности импульсов соответственно с периодами КТ, и Т КТ ± КЛТ, 1 21ЛТ. причем Т - .«.„д, где Л Тщдц - наибольшая ожидаемая величина отклонения периода измеряемой частоты от периода эталонной частоты;51 Тдул - наибольшее суммарное отклонение периодов измеряемой частоты от периодов эталонной частоты за время измерения . Импульсы измеряемой последовательности фолтируют относительно импульэталонной последовательности с начальн1Л4 сдвигом t - T ciKc Отклонение одного периода входной измеряемой последовательности составляет ЛТ1, двух периодов -dTI + ДТ2, а суммарное отклонение N периодов равNно (ДТ1 ДТ2 +... ДТЫ) 51 Подсчитав количество входбых импульсов N, прошедших за время измерения , и учитывая, что ДТ1 « ЛТ2 л ... - Л TN, получим ЛТ NaT, иначе ДТ ДTj/Н. Одинаковые по порядку с начала изт ерения импульсы эталонной и измеряеой последовательностей определяют границы временных интервалов. Первь после начала измерения временной ийтервал Тц и первь после конца измерения временной интервал If сравнивают и измepяюf разность как границы временных интервалов фор мируют одноименные с начала измерени импульсы входных последовательностей есть не что иное то разность Ы отклонение д, . как суммарное :1 N 21 дт.Т.т/ и N, опреде Зная величины 1-1 ляют период измеряемой частоты ± ЛТ Т ± 21 i-1 На фиг.1 приведена блок-схема уст ройства, реализунщего предложенный способ; на фиг.2 - временные диаграм мы работы блоков устройства. Устройство содержит блок 1 выделе ния последовательности Т, из изменяю щихся напряжений зталоннон частоты. блок 2 формирования задержки последовательности Tj, , блок 3 ф5рми рования интервала измерения, блок 4 формирования временных интервалов, блок 5 измерения разности временных интервалов и блок 6 подсчета импульсов, вычисления и регистрации резуль На фиг. 2 цифрами обозначены выходные сигналы соответствующих элементов, показанных на фиг.1. Характерные моменты переключения отмечены временем t - tg. Устройство работает следующим образом. Входнвй эталонный сигнал поступает на вход блока 1 формирования последовательности Tj . Входной измеряемый сигнал поступает на вход блока 2 формирования начального сдви га tjo и последовательности импульсов с периодом Т и . Начало измерения (момент времени t) начинается по команде блока 3, задающего время измерения t По команде блока 3 блок 1 начинает формировать последовательность импульсов с периодом Tj . Первый эталонной последовательности Tj поступает на первый вход блока 4, после чего на его выходе формируется начало временного интервала (t,). Поступающий на второй вход блока 4 сдвинутый импульс измеряемой последовательности Т формирует на выходе блока 4 конец временного интервала (tj). Блок 5 по команде блока 3 производит измерение первого временного интервала Тц и сохраняет значение результата измерения. Через время t, блок 5 по команде блока 3 (t,,.) вновь производит измерение временного интервала Т (tj, tg) и вычитание результатов измерения Т - Тц. В блоке 6 подсчитывается число импульсов N, прошедших за время от начала Т„ до начала и вычисляются величины йТ - Ы Tj t ДТ и ft, Таким образом, в предлагаемом устройстве в соответствии с предпоженным способом осуществляется измерение частоты с высокой точностью измерения в широком частотном диапазоне. Высокая точность измерения обеспечивается путем вычитания Т - Т, т.е. погрешности, обусловленные фазовыми сдвигами входных последовательностей, исключаются ,из конечного результата вычитания j Частотный диапа Ьй расширен за счет формирования предложенным способом новых последовательностей и Ti4 . Варьируя величинами t и -Hiw имеется возможность измерять частоту с высокой точностью в заданный отрезок времени в широком частотном диапазоне.
еч|
tg
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения частоты | 1974 |
|
SU620906A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 3446039, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
