Изобретение относится к приборостроению, а именно к устройствам из мерения расстояний с помощью оптических средств. Известно устройство для измерени .расстояния, содержащее объектив, фо тоэлектричцские преобразователи и средства фокусировки оптической сис темы в котором расстояние до объект рпределяется по плоскости резкого изображения СЗНаиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство, содержащее объектив, связанный с блоком перемещения и датчиком полож ния объектива, матрицу фотопреобразователей и.блоки формирования разностных сигналов, входы которых подключены к выходам матрицы фотопреобразователей С 2. Недостатком известных устройств является то, что они не позволяют измерить расстояние до объектов, од новременно находящихся в поле зрения объектива. Цель изобретения - повьшение точ ности измерения расстояний до объек тов, находящихся в поле зрения объе тива. Цель достигается тем, что в устройство для измерения расстояний, содержащее объектив, связанный с блоком перемещения и датчиком положения объектива, матрицу фотопреобр зователей и блоки формирования разностных сигналов, входы которых под ключены к выходам матрицы фотопреоб разователей, введены фильтры, пиковые детекторы и времяимпульсный преобразователь, при этом вход каждого фильтра подключен к выходу одного из блоков формирования разностных сигналов, выход каждого фильтра подключен к входу одного из пиковых детекторов, а выходы последних и выхбд датчика положения объектива подключены к входам время-импульсного преобразователя. На фйг.1 изображена структурная схема предлагаемого устройства; на фиг.2 - временные диаграммы, поясняю щие работу устройства. Устройство содержит объектив 1, через который изображение обозреваемого пространства 2 проектируется на плоскость фотоматрицы 3. Объектив 1 связан с блоком перемещения объектива 1, а также с датчиком 5 положения объектива. Плоскость фотоматрицы 3 разделена на несколько участков, при этом фотопреобразователи каждого участка фотоматрицы 3 соединены с входами блока 6 формирования сигналов разности. Выходы блоков 6 формирования сигналов разности через фильтры 7 подключены к входам пиковых детекторов 8, а выходы последних связаны с входами времяимпульсного преобразователя 9. Устройство работает следующим образом. Блоком 4 перемещения объектива 1 осуществляется периодическое возвратно-поступательное перемещение объектива 2 в направлении главной оптической оси. На фиг.2а показан график изменения расстояния от объектива 1 до плоскости фотоматрицы 3. Датчиком 4 положения при крайних положениях объектива формируются импульсы напряжения (фиг.26), которые подаются на вход время-импульсного преобразователя 9. При перемещении объектива 1 каждьи блоком 6 формирования сигналов разности осуществляется сравнение сигналов, снятых со смежных фотопреобразователей фотоматрицы 3. При периодической дефокусировке изображения на плоскости фотоматрицы 3 на выходах блоков 6 формирования разностных сигналов имеет место сигнал с периодически повторяющимися максимумами (фиг.2в).. Фильтрами 7 сигналов периодической дефокусировки вьщеляется переменная составляющая, в моменты максимальньк значений которой на выходах пиковых детекторов 8 формируются импульсы напряжения (фиг.2г). Промежутки времени между началом отсчета и импульсами пиковых детекторов 8 преобразуются во времяимпульсном преобразователе 9 в цифровое значение измеряемого расстояния. Таким образом, по положению моментов резкого изображения на участках плоскости фотоматрицы 3 за период ефокусировки определяется расстояние до объектов, одновременно нахоящихся в поле зрения объектива. Изобретение позволяет повысить очность определения расстояний до объктов, находящихся в поле зрения объекива, за счет близкой к оптимальной обаботке сигналов в звеньях устройства.
Фиг.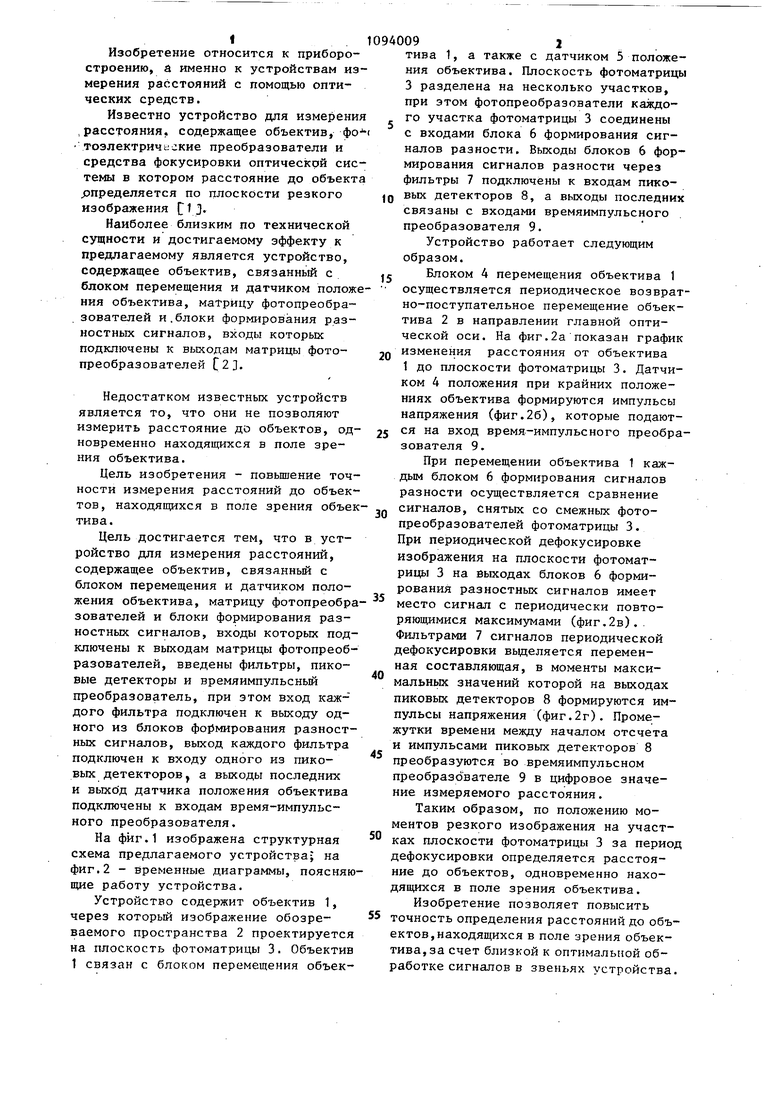
| название | год | авторы | номер документа |
|---|---|---|---|
| Фокусирующее устройство | 1987 |
|
SU1506316A1 |
| Устройство автоматической фокусировки объектива | 1991 |
|
SU1793418A1 |
| Устройство для измерения скорости движения объекта | 1981 |
|
SU953569A1 |
| Устройство для измерения скорости движения объекта | 1983 |
|
SU1118919A1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| Устройство для контроля дефектов и профилей поверхности изделий | 1987 |
|
SU1582094A1 |
| Устройство для автоматической фокусировки объектива съемочного аппарата | 1986 |
|
SU1647499A1 |
| ВСЕСОЮ _|пдтейтнп'^;;х^^^^^^^^; | 1972 |
|
SU332474A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРА И ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 1988 |
|
SU1828239A1 |
| Адаптивная оптическая система | 1983 |
|
SU1094012A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЙ, содержащее объектив, связанный с блоком перемещения и датчиком положения объектива, матрицу фотопреобразователей и блоки формирования разностных сигналов, входы которых подключены к выходам матрицы фотопреобразователей, отличающееся тем, что, с целью повышения точности измерения расстояний до объектов, находящихся в поле зрёния объектива, в него введены фильтры, пиковые детекторы и времяимпульсный преобразователь, при этом вход каждого фильтра подключен к выходу одного из блоков формирования разностных сигналов, выход каждого фильтра подключен к входу одного из пиковых детекторов, а выходы последг них и выход датчика положения объектива подключены к входам времяим- (Л пульсного преобразователя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СКВАЖИННОГО ФИЛЬТРА | 2007 |
|
RU2330940C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство автоматической фуксировки объектива | 1974 |
|
SU502354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
