S 789 го 11
|i J66 l//( /
J .
15 Изобретение относится к приборо строительной промьдиленности и може быть исйользовано для определения механических колебаний грунта, например при проведении геолого-геофизических работ в полевых условия а также для компоновки буксируемых шланговых приемных устройств, используемых при проведении сейсмора ведочных работ на мелководье. Предварительные расчеты показыв ют, что наиболее целесообразной явл ется компоновка морских мелководны кос сейсмоприемниками скорости или смещения, имеющих устройство саморриентации при повороте корпуса сейсмоприемника вокруг горизонталь ной оси. Мелководная коса с самоориентирующимися сейсмоприемниками требует значительно меньше времени для ее перестановки по профилю по сравнению с перестановкой отдельных сейсмоприемников. Известно устройство для преобра зования механических колебаний в электрический сигнал, содержащее не подвижные измерительную обмотку и коаксиальную магнитную систему с концентричными выступами на полюсны наконечниках и подвижный ферромагнитный якорь также с концентричными выступами. При колебаниях подвижной системы в данном устройстве под воз действием пришедших сейсмических волн изменяются площади воздушного зазора между противоположными выступами якоря, полюсного наконечника и кррпуса, что приводит к изменению проходящего через них магнитного потока. В результате этого в измерительной обмотке возникает электродвижущая сила, изменяющаяся с частотой воспринимаемого механического колебания. Достоинством устройства является практическая не зависимость его чувствительности от поворота устройства вокруг горизонтальной оси tn . Недостатком данного устройства является то, что оно по принципу действия относится к малочувствител ньш приборам электромагнитной систе мы и обладает довольно сложной конструкцией. , Наиболее близким к изобретению является самоориентирующийся сейсмо приемник, содержащий корпус, инертную массу с кольцевой ножевой опорой, преобразователь, упругий элемент преобразователя и жидкостный успокоитель. В сейсмоприемнике применен электродинамический преобразо ватель, содержащий индуктивности и подвижную инертную массу - магнитну систему, опирающуюся на выступч корпуса с помощью кольцевой ножевой опоры и удерживающуюся в положении равновесия с помощью упругого элемента - пружины. Сейсмоприемник обладает свойством самоориентации благодаря кольцевой опоре L21 . Однако наличие в известном сейсмоприемнике электродинамического преобразователя с раалиренным рабочим зазором и несимметричным изменением магнитного потока в нем приводит к падению его чувствительности, особенно на низких частотах. Кроме того, недостатком сейсмоприемника является недостаточная надежность и относительная сложность электродинамического преобразователя. Целью изобретения является упрощение конструкции с одновременным повышением надежности и расширением частотного диапазона. Поставленная цель достигается тем, что в самоориентирующемся сейсмоприемнике, содержащем корпус, инертную массу с кольцевой ножевой опорой, преобразователь, упругий элемент преобразователя, жидкостный успокоитель,преобразователь выполнен в виде деформационного преобразователя перемещений,инертная масса связана с деформационным преобразователем перемещений посредством струны,причем расстояние от кольцевой ножевой опоры до центра тяжести инертной массы больше радиуса кольцевой ножевой опоры. На чертеже схематично представлена конструкция сейсмоприемника. Сейсмоприемник содержит корпус 1, токовыводы 2 и 3, упругий элемент 4 преобразователя, деформационный преобразователь 5 механических колебаний в электрические сигналы, основание 6, струну 7, ножевую опору 8 кольцеобразной формы, подушку 9 кольцеобразной формы, инертную массу 10, контрящий винт 11, стекло 12, наконечник 13 струны, кремнийорганическую жидкость успокоителя 14, кожух 15 , точки 16 и 17 опоры рычага. Деформационный преобразователь 5, например пьезоэлектрический, выполнен из тонкой пьезокерамической пластины, жестко прикрепленной к поверхности упругого элемента 4, выполненного, например, из стеклотекстолита в виде пластинки соответствующих преобразователю 5 размеров. Упругий элемент 4 установлен на основании 6 так, что его перемещение в радиальных направлениях ограничено корпусом 1, закрепленным на основании 6 герметично, например при помощи эластичного герметика УТ32 (не показан). Струна 7 жестко прикреплена одним концом к упругому элементу 4, а вторым концом также жестко под соответствующим натягом упругого элемента 4 закреплена в,. наконечнике 13, кЬторый удерживается в отверстии инертной массы 10 при помощи контрящего винта 11. В основание б запрессована ножевая опора 8 кольцеобразной формы к. которой под действием натяга струны прижата подушка 9 кольцеобразной формы, которая жестко запрессована в основание инертной массы 10. Подушка 9 снабжена центральным отверстием для прохода струны 1, которая под действием инертной массы 10 опирается на внутреннюю стенку отверстия в точке 16 опоры. Подушка 9 опирается на ножевую опору 8 только в точке 17, так как остальным точкам опоры 8 прижатие подушки 9 ослаблено весом конструкции инертной массы 10. Радиус кольцевой ножевой опоры представляет собой рычаг с центром вращения в точке 17, торцовьле поверхности инертной массы 10 и стекла 12 образуют регулируемый зазор жидкостного успокоителя 14, заполненного вязкой кремнийорганической жидкостью. Стекло 12 жестко и герметично вмонтировано в кожух 15, герметично навинченный на основание б. Сейсмоприемник, будучи установлен ным горизонтально на колеблющуюся поверхность, например грунта, воспри нимает вертикальные колебания поверх ности основанием б и всеми остальными деталями, жестко связанными с основанием б. При этом инертная масса 10, стремясь сохранить первоначальное положение, поворачивается вокруг точки 17 и образует угол между горизонтальной осью и правой частью стру ны 7. В результате струна 7, перегибаясь в точке 16, приобретает дополнительное усилие натяга, образующее, дополнительно стрелу прогиба упругого элемента 4 вместе с преобразователем 5. Таким образом, механические колебания сейсмоприемника в вертикальном направлении преобразуются в соответствующие электрические сигналы, снимаемые с токовыводов 2 и 3, В конструкции сейсмоприемника использован пьезоэлектрический преобразователь механических колебаний в электрические сигналы. Очевидно, что вместо пьезоэлектрического можно с таким же успехом применить полупроводниковый, тензометрический или любой другой деформационный преобразователь. Под деформационными преобразователями понимаются преобразователи генераторного или параметрического типов, преобразующие элементы которых не имеют явно выраженных подвижных частей. В силу значительной жесткости упругих элементов таких преобразователей, вызванной малыми предельно возможными для них деформациями, эти преобразователи относятся к высокочастотным. Однако в предлагаемом устройстве рычажная передача смещена инерционной массой посредством рычага кольцевой ножевой опоры и струны и обеспечивает малые деформаций преобразователя и малую жесткость подвеса, тем самым снижая собственную частоту сейсмоприемника. Это в сочетании с тем, что указанный преобразователь в отличие от электродинамического не теряет чувствительности на низких частотах (особенно при использовании тензодатчиков ), наряду с высокой технологичностью и простотой конструкции обеспечивает преимущества изобретини я., Для реализации этих преимуществ необходимо, чтобы передаточное отношение рычага было меньше единицы, что обеспечивается тем, что расстояние от кольцевой ножевой опоры от центра тяжести инертной массы больше радиуса кольцевой ножевой опоры. Достоинством сейсмоприемника пред1лагаемой конструкции является совмещение микроамплитудного де-: .формационного преобр азов ат еля с максиамплитудным механизмом маятникового типа. Такое сочетание упрощает конструкцию, так как позволяет осуществлять сейсмоприемники скорости и смещения герцевого диапазона на дешевых и надежных высокочуввтвительных микроамплитудных деформационных преобразователях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмоприемник | 1984 |
|
SU1239665A1 |
| САМООРИЕНТИРУЮЩИЙСЯ ВЕРТИКАЛЬНЫЙ СЕЙСМОПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2142150C1 |
| Пьезоэлектрический сейсмоприемник | 1983 |
|
SU1125570A1 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| Сейсмический датчик | 1975 |
|
SU911404A1 |
| Пьезоэлектрический сейсмоприемник | 1983 |
|
SU1120262A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Пьезоэлектрический стенд для измерения параметров сейсмоприёмников, встроенных в изделие сложной формы | 2022 |
|
RU2791859C1 |
| Преобразователь механических колебаний | 1985 |
|
SU1408401A1 |
| Пьезоэлектрический сейсмоприемник | 1980 |
|
SU898365A1 |
САМООРИЕНТИРУЮиЩЙСЯ СЕЙСМОПРИЕМНИК, содержащий корпус, инертную массу с кольцевой ножевой опорой, преобразователь, упругий элемент преобразователя, жидкостный успокоитель, отличающийс я тем, что, с целью упрощения конструкции с одновременным повышением надежности и расширением частотного диапазона, преобразователь выполнен в виде деформационного преоб-. разователя перемещений, инертная масса связана с деформационным преобразователем перемещений посредством струны, причем расстояние от кольцевой ножевой опоры до центра тяжести инертной массы больше радиуса кольцевой ножевой опоры. (Л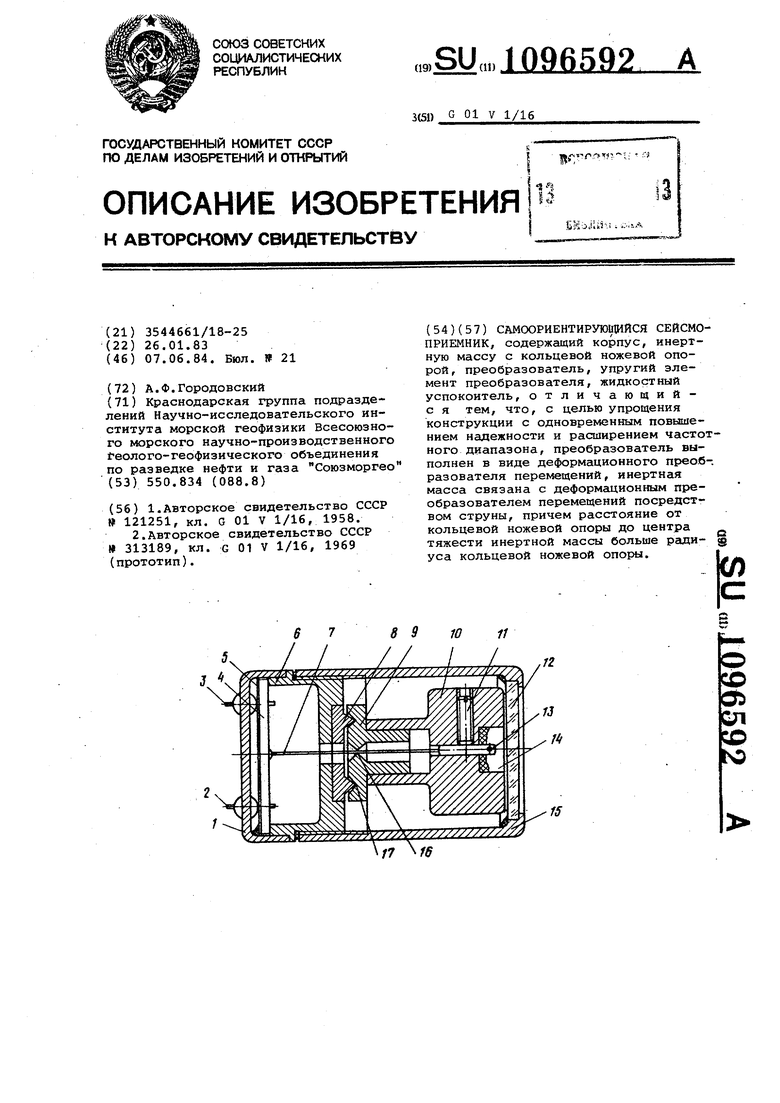
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
