со
VS
ОГ)
и-о
s|
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ | 2001 |
|
RU2201031C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ МИНИМАЛЬНЫХ УГЛОВ УПРАВЛЕНИЯ | 2019 |
|
RU2709026C1 |
| ФОРМИРОВАТЕЛЬ СИНХРОНИЗИРУЮЩИХ ИМПУЛЬСОВ | 2001 |
|
RU2183378C1 |
| Способ управления однофазным многозонным тиристорным преобразователем в режиме зависимого инвертора | 1987 |
|
SU1552314A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМОСТОВЫМ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1980 |
|
SU1001841A1 |
| Устройство для управления преобразователем | 1980 |
|
SU892650A1 |
| Устройство для ограничения угла регулирования многозонного сетевого преобразователя | 1983 |
|
SU1128347A1 |
| Способ управления однофазным инвертором | 1985 |
|
SU1288866A1 |
| Способ повышения работоспособности электровозов переменного тока в режиме рекуперативного торможения и устройство для его реализации | 2016 |
|
RU2659756C2 |
| ФОРМИРОВАТЕЛЬ СИНХРОНИЗИРУЮЩИХ ИМПУЛЬСОВ | 1996 |
|
RU2118037C1 |
СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УГЛА ЗАПАСА ЗАВИСИМОГО ИНВЕРТОРА, заключа-иицийся в том, что формируют импульсы синхронизации с сетью, задают угол запаса, соответствующий неискаженному напряжению сети, измеряют угол коммутации, определяют угол опережения, формируют импульсы управления тиристорами инвертора в моменты, соответствующие углам опережения, отличающийся тем, что, с целью повышения устойчивости инвертора и увеличения коэффициента мощности, формируют интервал , равный сумме измеренного угла коммутации и половины заданного угла запаса, измеряют дополнительный интервал между окончанием сформированного интервала и очередным импульсом синхронизации: определение угла опережения проводят СП путем суммирования сформированного и дополнительного интервалов.
6)f
с
J-.
utt
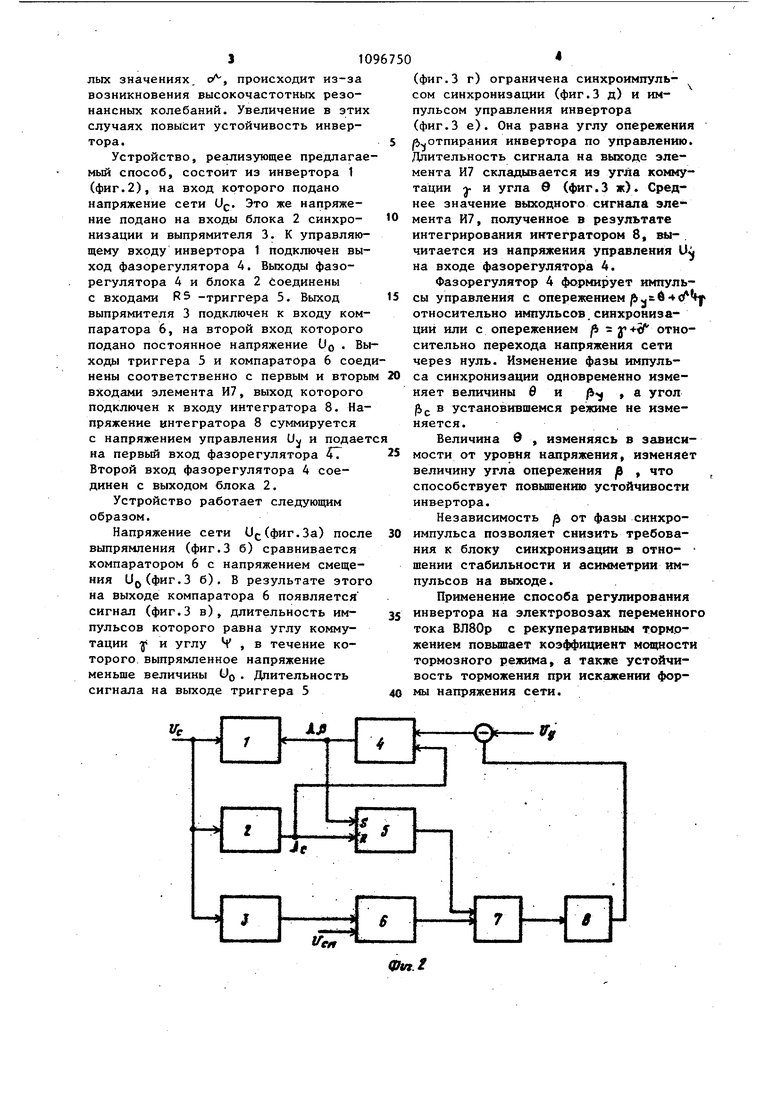
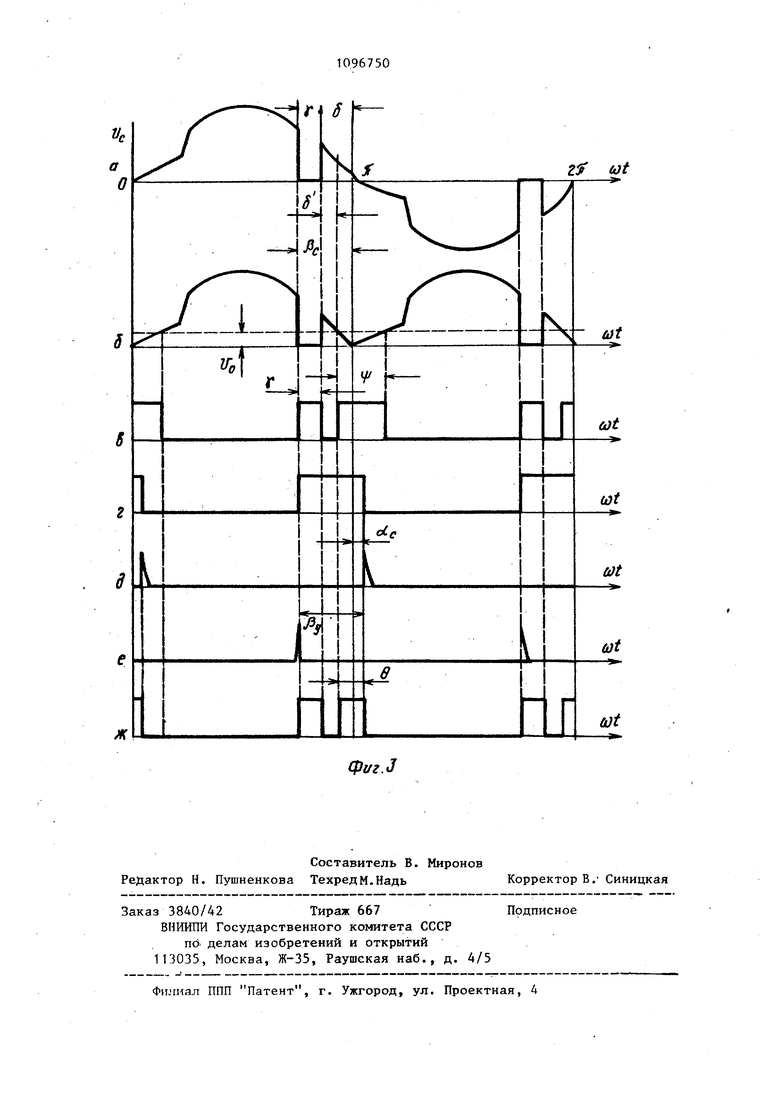
J87 Изобретение относится к электротехнике и может быть использовано для регулирования статических преобр зователей на электроподвижном составе переменного тока с рекуперативным торможением. Известен способ автоматического регулирования инвертора с использованием токов обратного напряжения в цепи выпрямленного тока, возникаюпщх после окончания коммутации Cl Недостатком этого способа является сложность его реализации в современных схемах инверторов с зоннофазовым регулированием напряжения. Наиболее близким к предлагаемому способу по технической сущности является способ регулирования угла запаса зависимого инвертора, заключающийся в том, что формируют импульсы синхронизации с сетью, задают угол запаса, соответствующий неискаженному напряжению сети, измеряют угол коммутации, определяют угол опережения, формируют импульсы управления тиристорами инвертора в моменты, соответствующие углам опере жения С 2 3. Недостатком известного способа является то, что угол опережения инвертора, а также угол запаса зависят от фазы импульсов синхронизации, которая изменяется при искажении формы напряжения сети. Угол запаса выбирают с запасом на величину возможного сдвига фазы синхронизирующего импульса, что снижает коэффици ент мощности преобразователя. Кроме этого, поддержание постоянным угла запаса независимо от величины и фор№и напряжения в интервале этого угла приводит к ухудшению устойчивости инвертора. Целью изобретения является повывение устойчивости инвертора и коэффициента мощности. Поставленная цель достигается тем, что согласно способу автоматического регулирования угла запаса за висимого инвертора, заключающемуся в том, что формируют импульсы синхро низации с сет.ью, задают угол запаса, соответствующий неискаженному напряжению сети, измеряют угол коммутации определяют угол опережения, формируют импульсы управления тиристорами инвертора в моменты, соответствующие углам опережения, формируют интервал, равный сумме измеренного угла коммутации и половины заданного угла запаса, измеряют дополнительный интервал между окончанием сформированного интервала и очередным импульсом синхронизации, определение угла опережения проводят путем суммирования сформированного и дополнительного интервалов. На фиг.1 приведены диаграммы, поясняющие способ регулирования; на фиг.2 - функциональная схема устройства, реализующего способ; на фиг.З - диаграммы, поясняющие работу устройства. Способ осуществляется следующим образом. В очередном полупериоде напряжения сети (фиг.1 а) измеряют угол коммутации у. Затем измеряют интервал 0 от момента Т о до синхроУказанный мовизирующего импульса, мент определяют по совпадению напряжения Up в интервале сА с заданньм напряжением VQ- Величину угла опережения /ь в следующий полупериод получают добавлением у + Q к половине угла запаса . Таким образом в установившемся режиме /Ь,, , где cCj.- угол сдвига импульса синхронизации (фиг.1 б,в). Величину cf выбирают равной половине угла запаса с/, который хотят ПОЛУЧИТЬ при номинальном неискаженном напряжении сети. Для этого напряжение (J выбирают равным половине и .1,(фиг.1а) при указанном напряжении сети. Как видно из выражения для.„-сС{- угол опережения не зависит от угла сдвига синхронизирующего импульса обстоятельство дает возможность ликвидировать запас в величине сЛ на изменения и повысить коэффициент мощности. При работе электровоза в режиме рекуперативного торможения увеличение 0 может происходить за счет провала напряжения в начале полупериода от коммутации выпрямителей на соседних электровозах, работающих в тяговом режиме. Из фиг.1 видно, что величина в обратно пропорциональна уровню напряжения в интервале угла запаса. Это полезное свойство предлагаемого способа. Уменьшение напряжения в интервале угла запаса, особенно при ма31лых значениях. сА, происходит из-за возникновения высокочастотных резонансных колебаний. Увеличение в зтих случаях повысит устойчивость инвертора. Устройство, реализующее предлагае мьй способ, состоит из инвертора 1 (фиг.2), на вход которого подано напряжение сети 0. Это же напряжение подано на входы блока 2 синхронизации и выпрямителя 3. К управляющему входу инвертора 1 подключен выход фазорегулятора 4. Выходы фазорегулятора 4 и блока 2 Соединены с входами R5 -триггера 5. Выход выпрямителя 3 подключен к входу компаратора 6, на второй вход которого подано постоянное напряжение UQ . Вы ходы триггера 5 и компаратора 6 соед нены соответственно с первым и вторы входами элемента И7, выход которого подключен к входу интегратора 8. На пряжение интегратора 8 суммируется с напряжением управления U и подае на первый вход фазорегулятора Второй вход фазорегулятора 4 соединен с выходом блока 2. Устройство работает следующим образом. Напряжение сети .За) посл выпрямления (фиг.З б) сравнивается компаратором 6 с напряжением смещения UQ(фиг.З б). В результате этог на выходе компаратора 6 появляется сигнал (фиг.З в), длительность импульсов которого равна углу коммутации и углу У , в течение которого выпрямленное напряжение меньше величины UQ . Длительность сигнала на выходе триггера 5
t
В -J (фиг.З г) ограничена синхроимпульсом синхронизации (фиг.З д) и импульсом управления инвертора (фиг.З е). Она равна углу опережения А отпирания инвертора по управлению. Длительность сигнала на выходе элемента И7 складывается из угла коммутации и угла 9 (фиг.3 ж). Среднее значение выходного сигнала элемента И7, полученное в результате интегрирования интегратором 8, вы- . читается из напряжения управления U на входе фазорегулятора 4. Фазорегулятор 4 формирует импульсы управления с опережением относительно импульсов,синхронизации или с опережением f относительно перехода напряжения сети через нуль. Изменение фазы импульса синхронизации одновременно изменяет величины б и / f а угол в установившемся режиме не изменяется. Величина в , изменяясь в зависимости от уровня напряжения, изменяет величину угла опережения , что , способствует повышению устойчивости инвертора. Независимость от фазы синхроимпульса позволяет снизить требования к блоку синхронизации в отно- шении стабильности и асимметрии импульсов на выходе. Применение способа регулирования инвертора на электровозах переменного тока ВЛЗОр с рекуперативным торможением повышает коэффициент мощности тормозного режима, а также устойчивость торможения при искажении формы напряжения сети. г/
фиг.З at
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматического регулирования угла зажигания управляемых вентилей | 1956 |
|
SU106348A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тихменев Б.Н.,Трахтман Л.М | |||
| Подвижной состав электрофицированных железных дорог | |||
| М., Транспорт, 1980, 471 с. | |||
