11288866
Изобретение относится к электротехнике и может быть использовано для управления ведомыми преобразователями, используемыми, например, на электроподвижном составе.
Цель изобретения - повышение качества управления.
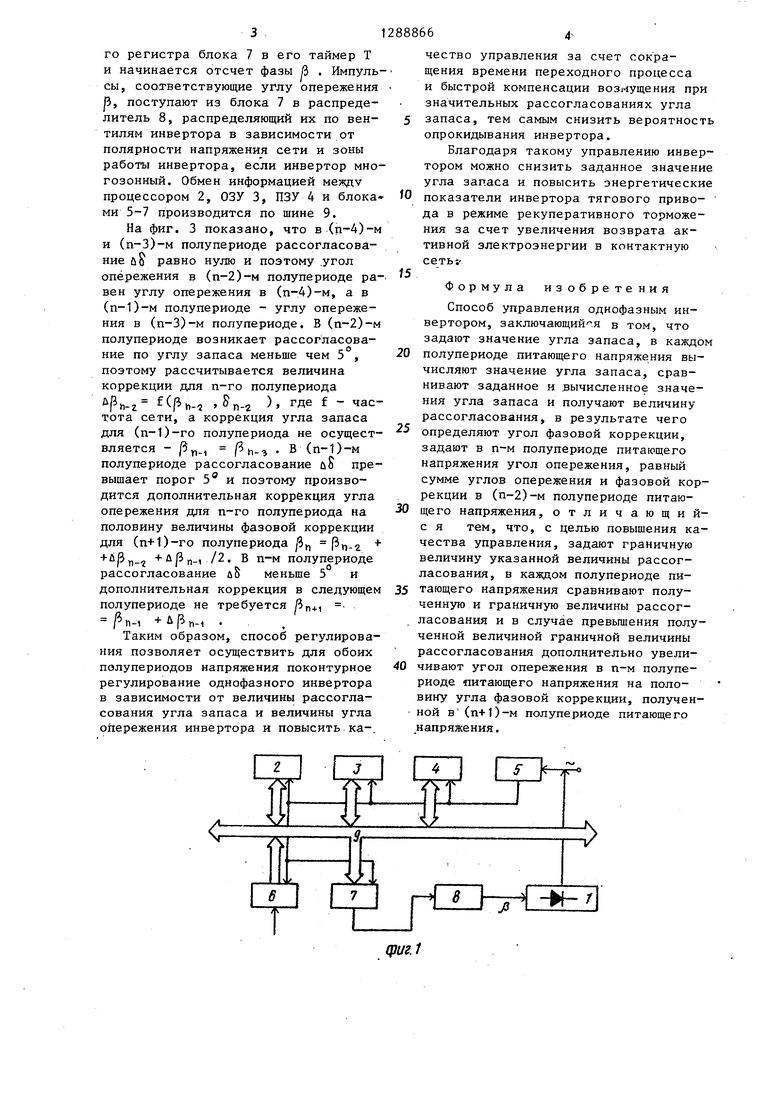
На фиг. 1 изображено устройство, реализующее предлагаемый способ упса 5 р - у , затем - рассогласование между заданным значением угла запаса и фактическим й§ & - Sm (фиг. 2), после чего процессор 2, переходит к определению величины фазовой коррекции л|Ь . Нелинейный характер вычисления коррекции обусловлен синусоидальной формой проти- во-ЭДС сети. При больших значенниях
равления; на фиг. 2 - схема алгоритма 0 J коммутация тока вентилей инвертора
работы устройства; на фиг. 3 - менные диаграммы, поясняющие его работу.
Однофазный инвертор 1 (фиг. 1) управляется от микропроцессорной системы управления, состоящей из процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4 блока 5 синхронизации, блока 6 .ввода временного интервала, фазосдвигающе- го блока 7 и распределителя 8. Входы- выходы процессора 2, ОЗУ 3, ПЗУ 4, выход блока 6 и вход блока 7 соединены шиной 9 адресов и данных. Выход блока 7 соединен с входом распределителя 8, выход которого соединен с управляющими цепями инвертора 1. Выход инвертора 1 соединен с питающей сетью, напряжение которой поступает на вход блока 5, выход которого соединен с шинами синхронизации процессора 2, ОЗУ 3, ПЗУ 4, блоков 6 и 7.
Устройство для реализации способа работает следующим образом,
При переходе питающего напряжения через нулевое значение на выходе блока 5 появляется- синхроимпульс, по которому производится начальная установка процессора 2, блоков 6 и 7 и начального адреса ОЗУ 3 и ПЗУ 4, после чего устройство реализует алгоритм, схема которого приведена на
осуществляется под большим напряжением сети и протекает быстрее, поэтому при f) 35 достаточно скоррек тировать угол опережения на половину 5 рассогласования я& , а по мере умень шения угла опережения , т.е. умень шения величины напряжения,, под дейст вием которого протекает коммутация
20
тока инвертора, величина коррекции растет и при J 25 составляет 7/8ло (фиг. 2). После определения
25
30
величины U |1 в зависимости от и uS устройство осуществляет коррекцию угла опережения (3 на величину u|i . В зависимости от полупериода питающего напряжения (положительное или отрицательное напряжение U, ), для которого вычислялось значение |i , производится запись кода ft в соответствующую ячейку ОЗУ 3 - /5 при положительном напряжении и р - при отрицательном.
При превышении рассогласованием До порогового значения, принятого, 35 например, 5°, процессор 2 дополнительно увеличивает значение угла опережения р для п-го полупериода на половину величины фазовой коррекции UJ5/2, вычисленной в (п-1)-м полупериоде (фиг. 2). Например, при выполнении алгоритма в положительном полупериоде, после занесения скорректированного значения в соответствующую положительному полупериоду
40
фиг. 2. Команды управления процессо- 5 ячейку ОЗУ 3 и Ci5 5°, значение /3
ром 2 и константы хранятся в ПЗУ 4. Хранение промежуточных результатов вычислений процессора 2 выполняет ОЗУ 3. Значение угла опережения задается устройством в каждом полупериоде вычитающего напряжения. Измеренное значение угла коммутации у подается на вход блока 6, который преобразует длительность импульса, соответствующую углу коммутации, в цифровой код. После этого процессор 2 выполняет программу регулирования угла опережения . Вначале вычисляется фактическое значение угла запав ячейке и , соответствующей следующему, отрицательному полупериоду изменяется на величину коррекции, . предназначенной для последующего,
50 положительного полупериода. После этого осуществляется вывод значения р, соответствующего следующему Полупериоду, в буферный регистр блока 7. Устройство ожидает прихода следуюJ.J щего синхроимпульса от блока 5, после чего цикл работы устройства повторяется. После прихода синхроимпуль са значение фазы угла опережения инвертора переписывается из буферноса 5 р - у , затем - рассогласование между заданным значением угла запаса и фактическим й§ & - Sm (фиг. 2), после чего процессор 2, переходит к определению величины фазовой коррекции л|Ь . Нелинейный характер вычисления коррекции обусловлен синусоидальной формой проти- во-ЭДС сети. При больших значенниях
осуществляется под большим напряжением сети и протекает быстрее, поэтому при f) 35 достаточно скорректировать угол опережения на половину рассогласования я& , а по мере уменьшения угла опережения , т.е. уменьшения величины напряжения,, под действием которого протекает коммутация
20
тока инвертора, величина коррекции растет и при J 25 составляет 7/8ло (фиг. 2). После определения
5
0
величины U |1 в зависимости от и uS устройство осуществляет коррекцию угла опережения (3 на величину u|i . В зависимости от полупериода питающего напряжения (положительное или отрицательное напряжение U, ), для которого вычислялось значение |i , производится запись кода ft в соответствующую ячейку ОЗУ 3 - /5 при положительном напряжении и р - при отрицательном.
При превышении рассогласованием До порогового значения, принятого, 5 например, 5°, процессор 2 дополнительно увеличивает значение угла опережения р для п-го полупериода на половину величины фазовой коррекции UJ5/2, вычисленной в (п-1)-м полупериоде (фиг. 2). Например, при выполнении алгоритма в положительном полупериоде, после занесения скорректированного значения в соответствующую положительному полупериоду
0
в ячейке и , соответствующей следующему, отрицательному полупериоду, изменяется на величину коррекции, предназначенной для последующего,
положительного полупериода. После этого осуществляется вывод значения р, соответствующего следующему Полупериоду, в буферный регистр блока 7. Устройство ожидает прихода следующего синхроимпульса от блока 5, после чего цикл работы устройства повторяется. После прихода синхроимпульса значение фазы угла опережения инвертора переписывается из буферного регистра блока 7 в его таймер Т и начинается отсчет фазы в . Импульсы, соответствующие углу опережения В, поступают из блока 7 в распределитель 8, распределяющий их по вентилям инвертора в зависимости от полярности напряжения сети и зоны работы инвертора, если инвертор многозонный. Обмен информацией мезеду процессором 2, ОЗУ 3, ПЗУ 4 и блока ми 5-7 производится по шине 9.
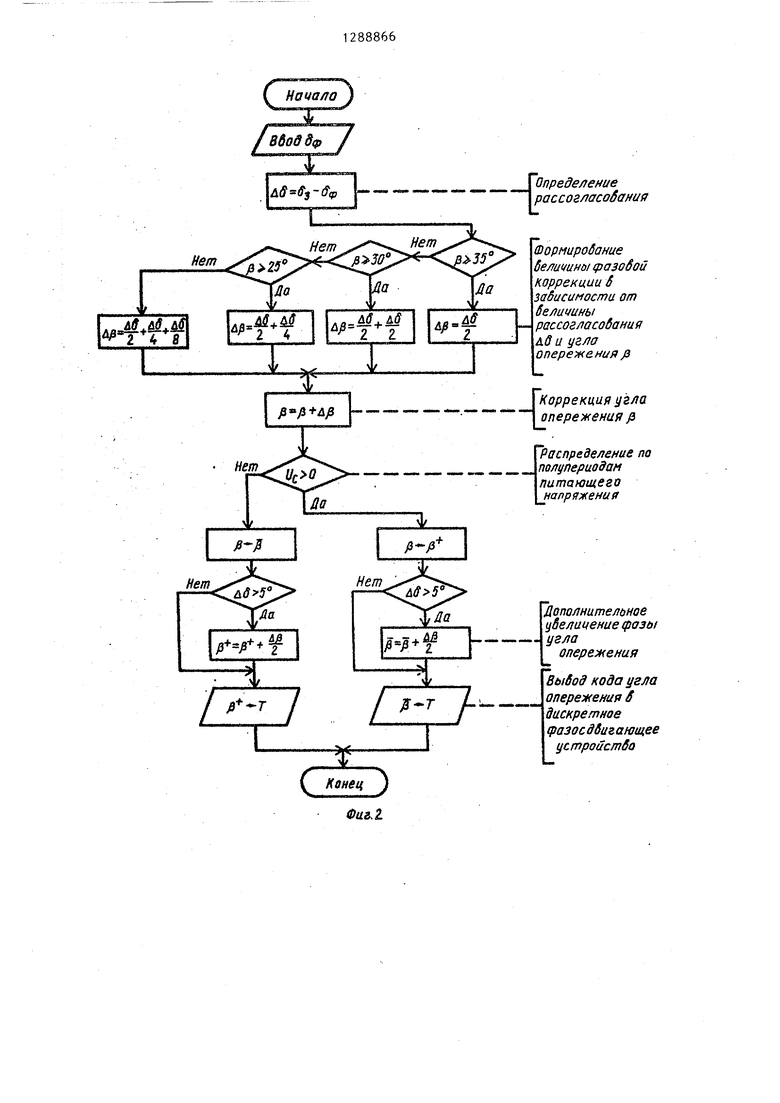
На фиг. 3 показано, что в (п-4)-м и (п-З)-м полупериоде рассогласование й равно нулю и поэтому .угол опережения в (п-2)-м полупериоде равен углу опережения в (п-Л)-м, а в (п-1)-м полупериоде - углу опережения в (п-З)-м полупериоде. В (п-2)-м полупериоде возникает рассогласование по углу запаса меньше чем 5 , поэтому рассчитывается величина коррекции для п-го полупериода
), f - час- тота сети, а коррекция угла запаса для (n-l)-ro полупериода не осуществляется - /5,., В (n-t)-M полупериоде рассогласование йО превышает порог 5 и поэтому производится дополнительная коррекция угла опережения для п-го полупериода на половину величины фазовой коррекции для (п+1)-го полупериода - + , +д|3п, /2. В п-м полупериоде рассогласование л5 меньше 5 и дополнительная коррекция в следующем полупериоде не требуется n+i +uf., .
Таким образом, способ регулирования позволяет осуществить для обоих полупериодов напряжения поконтурное регулирование однофазного инвертора в зависимости от величины рассогласования угла запаса и величины угла опережения инвертора и повысить ка-.
0
чество управления за счет сокращения времени переходного процесса и быстрой компенсации возмущения при значительных рассогласованиях угла запаса, тем самым снизить вероятность опрокидывания инвертора.
Благодаря такому управлению инвертором можно снизить заданное значение угла запаса и повысить энергетические показатели инвертора тягового привода в режиме рекуперативного торможения за счет увеличения возврата активной электроэнергии в контактную сеты 5
Формула изобретения
Способ управления однофазным инвертором, заключающий .я в том, что задают значение угла запаса, в каждом
0 полупериоде питающего напряжения вычисляют значение угла запаса, сравнивают заданное и .вычисленное значения угла запаса и получают величину рассогласования, в результате чего
определяют угол фазовой коррекции, задают в п-м полупериоде питающего напряжения угол опережения, равный сумме углов опережения и фазовой коррекции в (п-2)-м полупериоде питаю0 щего напряжения, отличающий- с я тем, что, с целью повышения качества управления, задают граничную величину указанной величины рассогласования, в каждом полупериоде пи5 тающего напряжения сравнивают полученную и граничную величины рассогласования и в случае превьш1ения полученной величиной граничной величины рассогласования дополнительно увели0 чивают угол опережения в п-м полупериоде питающего напряжения на половину угла фазовой коррекции, получен- ной в (п+1)-м полупериоде питающего напряжения.
/7-2
N
/7-/
/7
N
s,
4p J5
8„,,гр
Лд„..гр
П-2 П-и
Редактор A. Козориз
Составитель В. Миронов
Техред А.Кравчук Корректор Ё, Сирохман
Заказ 7822/56
Тираж 683
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
-Ад.
/7-ff
А.
2
7,,.J
Подписное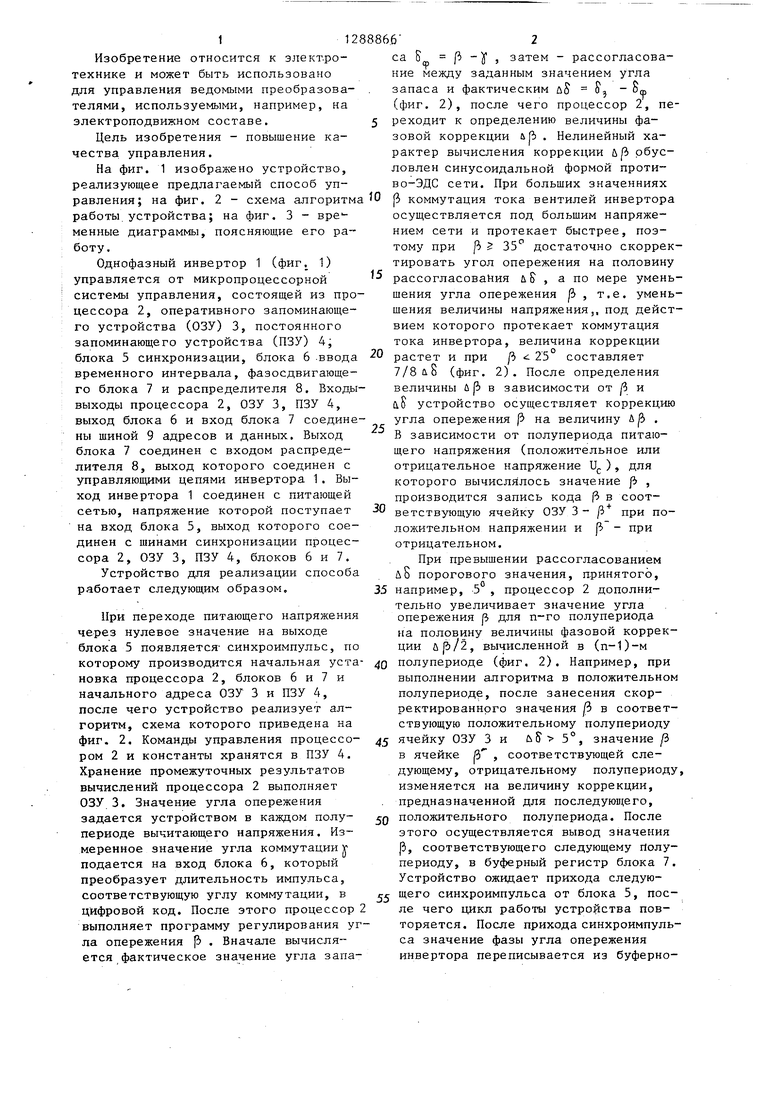
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления однофазным инвертором | 1985 |
|
SU1365306A1 |
| СПОСОБ УПРАВЛЕНИЯ ОДНОФАЗНЫМ ИНВЕРТОРОМ | 2001 |
|
RU2201031C2 |
| Устройство для управления @ -фазным инвертором | 1980 |
|
SU921040A1 |
| Способ управления группами параллельных вентильных преобразователей | 1986 |
|
SU1427524A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2004 |
|
RU2262189C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ ПРОГНОЗИРУЮЩЕГО ВЕКТОРНОГО РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО ПРЕОБРАЗОВАТЕЛЯ | 2004 |
|
RU2284635C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| Устройство для управления выпрямительно-инверторным преобразователем | 1987 |
|
SU1408511A1 |
Изобретение относится к электротехнике и может быть использовано, для управления ведомыми преобразователями. Целью изобретения является повьпиение качества регулирования. Данный способ осуществляет для обоих полупериодов напряжения поконтурное регулирование однофазного инвертора в зависимости от величины рассогласования угла запаса и величины.угла опережения инвертора и позволяет повысить качество управления за счет сокращения времени переходного процесса и быстрой компенсации возмущения при значительных рассогласованиях угла запаса и тем самым снизить вероятность опрокидывания инвертора. 3 ил. W
| Способ управления однофазным инверто-POM | 1979 |
|
SU819927A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления инвертором | 1981 |
|
SU961098A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
