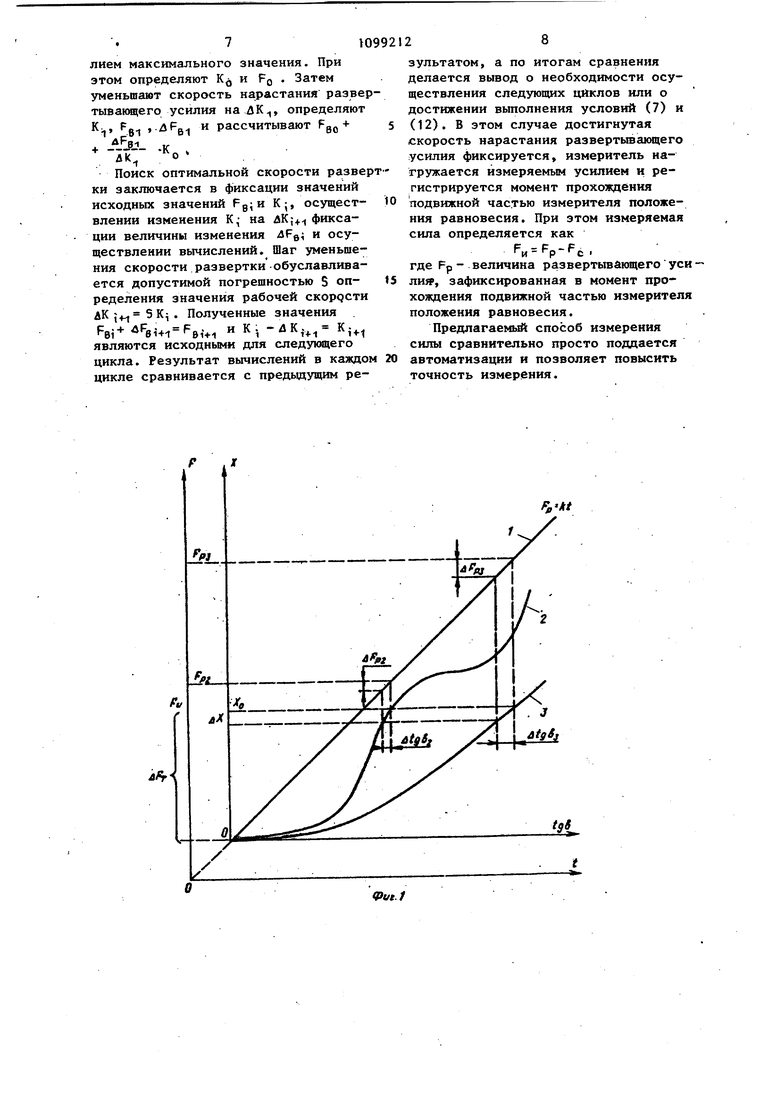
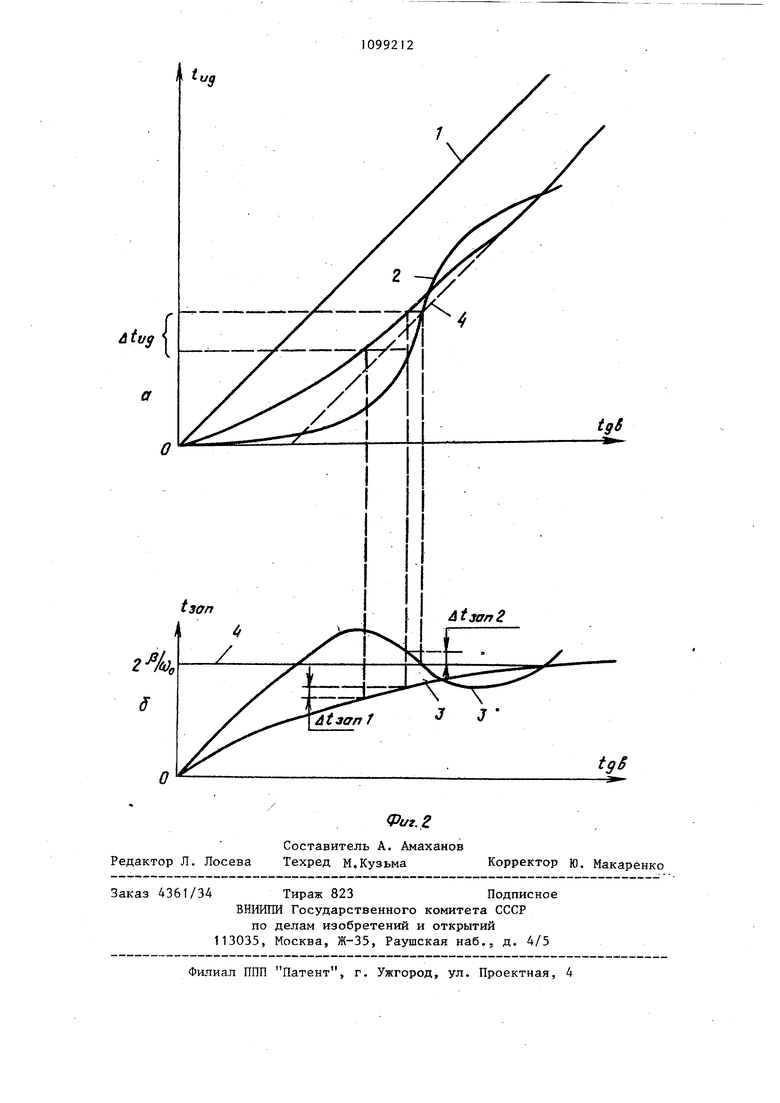
Изобретение относится к измерительной технике и предназначено для использования при создании измерителей силы развертывающего уравнове шивания. Известен способ измерения силы, заключающийся в том,что ее сравнивают с изменяющимся во времени усилием. Однако данный способ не обеспечива необходимой помехоустойчивости flj. Наиболее близким по технической сущности к изобретению является спо соб измерения силы, заключающийся в том, что ее сравнивают с нарастаю щим во времени развертывающим усили ем посредством преобразования нерав новесия сравниваемых сил в ограниченное перемещение подвижной части измерителя, а об измеряемой силе су дят по величине развертьгаающего уси лия в момент регистрации прохождени подвижной частью измерителя положен равновесия С 23Этот способ также не обеспечивает стабильности результатов язмерения при действии внешних дестабилизи рующих факторов, таких как вибрации j повышенная температура и т.д. Целью изобретения является повышение точности за счет уменьшения влияния внешних дестабилизирующих факторов. Указанная цель достигается тем, что согласно способу измерения силы заключающемуся в том, что ее сравнивают с нарастающим во времени развер тывающим усилием посредством преобра зования неравновесия сравниваемых сил в ограниченное перемещение, подвижной части измерителя, а об измеряемой силе судят по величине развертывающего усилия в момент регистрации прохождения подвижной частью измерителя положения равновесия, раз вертьгеающее усилие прикладывают к подвижной части измерителя с оптимал ной скоростью нарастания, которую определяют устанавливая сначала такую скорость нарастания развертывающего усилия, при которой обеспечивается достижение максимума развертывающего усилия в момент прохождени подвижной частью измерителя положения равновесия, а затем ступенчато снижают ее до тех пор пока не достиг нет минимум вьфажения ЛР номер ступени снижения скорости нарастания развертывающегоУСИЛИЯ, скорость нарастания развертывающего усилия, установленная на -й ступени; шаг уменьшения скорости развертывающего усилия между ступенями величина превышения развертывающего усилия Рр1 в момент прохождения подвижной частью измерителя положения равновесия над известной статической силой Fe которая обеспечивает приведение к положению равновесия подвижной части ненагруженного измерителя-, шаг изменения Pg между двумя ступенями скорости развертывающего усилия. дставлены градлагаемый способ заключается в елей силы, динаики которых опильным уравнениреакция на возизменяющеесяе описывается ми: где К - скорость нарастания развертывающего усилия-, W - жесткость упругих элементов подвески; WQ - частота собственных колебаний i /i - степень успокоения подвиж ной части-; 1дв время движения подвижной части. На фиг. 1 схематично представлен процесс развертывающего уравновешивания, где 1 - соответствует развер тывающему усилию; 2 и 3 - графики движения подвижных частей измерителей силы с различными динамическими характеристиками /j и Wp от ограничи теля перемещения до положения равно весия (например, нейтрали дифференциального преобразователя перемещения), XQ - величина перемещения под вижной части; Рц измеряемое усили 4 F-p - величина разбаланса измеряемо го и развертывающего усилий, превышение которой обеспечивает прижим подвижной части к ограничителю перемещения, Fp 2 j величины развертыв ющего усилия в момент прохождения положения равновесия. Процесс движе ния подвижной части после прохождения положения равновесия не рассмат ривается, но величина перемещения подвижной части обычно ограничена и сверху. Изменение величины перемещения XQ под воздействием дестабилизирующих факторов (например, температуры или вибраций) на величину дХ приводит к появлению погрешностей измерения, обусповленных изменением величины или FP -, , Д Pp. Изобретение позволяет осуществит экспериментальное определение скоро ти развертки, при которой обеспечивается минимизация возникающих аддитивных погрешностей, а тем самым обеспечить повьпиение точности развертывающего способа измерения сил. Учитывая, что возникающие аддити ные погрешности определяются характером движения подвижной части в момент прохождения положения равновесия, в дальнейшем рассматриваются процессы движения подвижной части в пределах перемещения от ограничителя до положения равновесия. Выражения (1-3) обобщенно могут быть Представлены в виде ид 1Г Ав Эс1П где i ,д соответствует времени движения подвижной части измерителя силы для идеализированного случая, как если бы имело место нулевое запаздывание; t,o(n f( . /5 , w , т.е. является функцией времени движения ,/4 На фиг. 2« и 5, .представлена графическая иллюстрация для различных значений /5, где 1 - прямая, характеризующая идеализированньпЧ случай отсутствия запаздывания; 2 - график реальной зависимости i мд ( ) ; 3-- график зависимости (др) ; 4- ассимптота, к которой стремится при достаточно большой величине Ьд. Из анализа выражения (1) - (4) следует, что для идеального случая вариация значений X должна привести к изменению i,например, на величину -t и такому же изменению по величине -Ьдц. Реально изменение времени движения отличается от идеального случая, а степень отличия определяется производной (дд). У измерителей со степенью успокоения подвижной части /} больше 1 до выхода на установившийся режим производная V()0,a при степени успокоения меньше единицы Ч() может быть как больше, так и меньше нуля. На фиг. 2а и о показано, что при изменении величины перемещения на ЛХ, а идеального времени движения на t,ддля случая () 0 происхо- дит увеличение на di,o(n-i Р /( - уменьшение Ha/Jtj f, величины изменения времени движения по сравнению с идеальным случаем или установившимся режимом движения. Минимума изменение достигнет, таким образом, при выполнении усло я ui (iдgj: nax (5)
ли иначе
. иД
.(t
b,,J,..,
АВ
д-ь
At
At
ид
НА
ИА
(6)
Очевиден вывод, что (6) достигнет минимума тогда, когда выполнится соотношен1 е
4i.
М1- Ып . (т|.
ii
При ft 7/ 1 ЭТО условие выполнится при установившемся характере движения, когда изменение .величины перемщения Или i. не вызовет изменения J. Зап .
При |i 1 условие (7) выполнится тогда, когда изменение вызовет максимальное по абсолютной величине но отрицателоное по знаку изменение
Переход от условия (5) существовния оптимальной скорости развертки к условию (7) обусловлен тем, что при использовании условия (5) время движения определяется очевидным выражением
...
в котором необходимо определить и достаточно часто контролировать величину F -;iF, т.е. усилие трогания превышение которого приводит в движение подвижнзоо часть измерителя силы. И если для экспериментального определения значения F, достаточно определить значение статического усилия, обеспечивающего приведение подвижной части к положению равновесия, то для определения усилия трогания необходимо осуществить фиксацию момента отхода подвижной части от ограничителя.
Вместе с тем, наличие внешних вибраций может привести к возникновению эффекта биения подвижной части об ограничитель перемещения, что прейятствует получению достоверного значения усилия трогания.
В связи с вышеизложенным для упрощения процесса определения рабочей скорости развертки о времени запаздывания в (7) предлагается судить по скорости развертки и величине v превьпиения развертывающего усилия в момент прохождения подвижной частью
положения равновесия над значением статического усилия, обеспечивающего приведение подвижной части к положению равновесия.
иА (7) справедливы следующие соотношения:
4t .leilili
ЗИП
1+1
где f-Q- Fpi-F представляет выбег (превьш1ение) развертывающего усилия над. величиной измеряег/ого усилия, а
J
/iV.xv
(10)
Тогда (7) преобразуется к виду
Опуская постоянный сомножитель 25 1/XW, получим
F.....-min (iz)
Ом)
Из всего ИЗЛОЖЕННОГО следует, что измерительный процесс у измерителей силы развертывающего уравновешивания необходимо организовать на такой скорости развертки, что ее 5 вариация обеспечит достижение минимума выражений (12) и, как следствие, -(7). При этом скорость прохождения подвижной частью положения равновесия {нейтрали дифференциального преобразователя перемещения) будет рав. на (при 1 ) или больше (при ) скорости движения подвижной части в установившемся режиме. Для значений /J, например, от О до 0,3 получается .2 - t,3-KpjiTHoe превышение, что позволяет при прочих равных условиях или снизить требования и стабильности механических узлов, ответственнь х на нуль прибора, или повысить точность измерения.
Предлагаемый способ реализуется следующим образом.
При ненагруженном измерителе устанавливают такую скорость нарастания развертывающего усилия, при котором подвижная часть измерителя достигает положения равновесия в момент достижения развертывающим усилием максимального значения. При этом определяют К и FQ . Затем уменьшают скорость нарастания разве тывающего усилия на ЛК, определяют и рассчитывают Fg + «i. 61 + AlBj. Д1С, Поиск оптимальной скорости разве ки заключается в фиксации значений исходных значений Fg-и К;, осуществлении изменения К на ЛК;+ фиксации величины изменения Fg и осуществлении вычислений. Шаг уменьшения скорости развертки-обуславливается допустимой погрешностью S определения значения рабочей скордсти . Полученные значения FBI ei4i И К. -4К., являются исходными для следующего цикла. Результат вычислений в каждо цикле сравнивается с предыдущим результатом, а по итогам сравнения делается вывод о необходимости осуществления следующих циклов или о достижении вьтолнения условий (7) и (12). В этом случае достигнутая скорость нарастания развертывающего усилия фиксируется, измеритель нагружается измеряемым усилием и регистрируется момент прохождения подвижной частью измерителя положения равновесия. При этом измеряемая сила определяется как . где FP - величина развертывающего уси ли, зафиксированная в момент прохождения подвижной частью измерителя положения равновесия. Предлагаемый способ измерения силы сравнительно просто поддается автоматизации и позволяет повысить точность измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения поверхностного натяжения жидкости | 1983 |
|
SU1157408A1 |
| Многоканальный измеритель аналоговых сигналов | 1982 |
|
SU1069152A1 |
| Тягово-сцепное устройство прицепа | 1984 |
|
SU1220933A1 |
| Устройство для натяжения ленточного материала при сматывании с рулона | 1978 |
|
SU747564A1 |
| Способ построения сейсмических разрезов | 1977 |
|
SU737901A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ НА РАССТОЯНИЕ ПОКАЗАНИЙ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1933 |
|
SU42829A1 |
| Устройство для измерения нелинейности пилообразного напряжения | 1981 |
|
SU1029105A1 |
| Весы с автоматическим уравновешиванием | 1987 |
|
SU1534327A1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО К ОСЦИЛЛОСКОПУ | 1969 |
|
SU238658A1 |
СПОСОБ ИЗМЕРЕНИЯ СИЛЫ, заключающийся в том, что ее сравнивают с нарастающим во времени развертывающим усилием посредством преобразования неравновесия cpaвнивae а9IX сил в ограниченное перемещение подвижной части измерителя, a об измеряемой силе судят по величине развер тывгцощего усилия в момент регистрации прохождения подвижной частью измерителя положения равновесия, о тличающийся тем, что, с целью повышения точности за счет уменьшения влияния внешних дестабилизирующих факторов, развертывающее усилие прикладывают к подвижной части измерителя с оптимальной скоростью нарастания, которую определяют устанавливая сначала такую скорость на- растания развертывающего усилия, при которой обеспечивается достижение максимума развертывающего усилия в момент прохождения подвижной частью измерителя положения равновесиями затем ступенчато снижая ее до тех пор, пока не достигнет минимума выражения: ip xifeiiilLi, ,.... i- ) 0,1.2.3 где номер ступени снижения скорости нарастания развертьтакяцего усилия; «i скорость нарастания развертывающего усилия; установленная на 1-Й ступени; K,H KurKi шаг уменьшения скорости развертывающего усилия между ступенямиi . величина превышения развертывающего усилия Fpj в момент прохождения подвижной частью ;о :о измерителя положения равновесия N9 над известной статической силой F, которая обеспечивает приведение к положению равновесия подвижной части ненагруженного измерителя; dV-fl tiMi- e з«в«««™ между двумя ступенями скорости развертывающего усилия.
К,At
0ot./
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Туричин A.M | |||
| и др | |||
| Электри- | |||
| ческие измерения неэлектрических величин | |||
| Л., Энергия, 1975, с.481483 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 0 |
|
SU259440A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
