2. Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства, по которому осущест-. вляют движение механизма с заданньм ускорением на трех временных интервалах, причем на первом интервале осуще; ствляют движение с постоянньм ускорением до достижения механизмом заданной средней скорости на трех интевалах, на втором интервале осуществляют движение механизма с упомяну;той средней скоростью, а на третьем интервале осуществляют движение механизма до заданной конечной скорости с ускорением, равньм ускорению на первом интервале, отличающийс я тем, что, с целью расширения области применения, измеряют промежуток времени от начала движения механизма на втором интервале при возрастании или убьюании амплитуды приложенной к механизму внешней силы, измеряют и запоминают амплитуду этой силы в конце указанного промежутка времени, находят момент времени при убывании или возрастании амплитуды приложенной к механизму внешней силы, когда ее амплитуда вновь равна запомненной амплитуде, и обеспечивают дальнейшее протекание второго интервала от найденного момента времени в течение промежутка времени, равно- ; го измеренному.
3. Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемнотранспортного средства, по которому осуществляют движение механизма с заданным ускорением на трех временных интервалах, причем на первом интервале осуществляют движение с ПОСТОЯННЕЙ ускорением до достижения механизмом заданной -средней скорост на трех интервалах, на втором интервале осуществляют движение механизма с упомянутой средней скоростью, а на третьем интервале осу ществляют движение механизма до заданной конечной скорости с ускорением, равным ускорению на первом интервале, отличающийся тем, что, с целью расщирения области применения, измеряют промежуток времени от начала движения механизма на втором интервале при возрастании или убьшании амплитуды приложенного к механизму момента привода измеряют и запоминают амплитуду этого момента в конце указанного промежутка времени, находят момент времени при убьгеании или возрастании амплитуды приложенного к механизму момента привода, когда его амплитуда вновь равна запомненной амплитуде, и обеспечивает дальнейшее протекание второго интервала от найденного момента времени в течение промежутка времени, равного измеренному.
I. Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транс портного средства, по которому осуще ствляют движение механизма с заданны ускорением на трех временных интерва ;лах, причем на первом интервале осуществляют движение с постоянным ускорением до достижения механизмом I заданной средней скорости на трех интервалах, на втором интервале осуществляют движение механизма с упомянутой средней скоростью, а на третьем интервале осуществляют движение механизма до заданной конечной скорости с ускорением, равным ускорению на первом интервале, отлич ающ и и с я тем, что, с целью расширения области применения, измеряют промежуток времени .от начала движения механизма на втором интервале или возрастании или убывании амплитуды отклонения грузозахватного органа от положения равновесия, измеряют и запоминают амплитуду этого отклонения в конце указанного промежутка времени находя момент времени при убывании или возрастании амплитуды отклонения грузозахватного органа от положения равновесия, когда его амплитуда вновь равна запомненной амплитуде, и обеспе чивают дальнейшее протекание второго интервала от найденного момента времени в течение промежутка времени, равного измеренному.
Изобретение относится к подъемнотранспортному машиностроению, а именНо к способам успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства.
Известен способ успокоения колеба-НИИ подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства, согласно которому осуществляют движение механизма с заданным ускорением на трех временных интервалах, причем на первом интервале осуществляют движение с постоянным ускорением до достижения механизмом заданной средней скорости на трех интервалах, на втором интервале осуществляют движение меха1шзма с упомянутой средней скоростью, а на третьем интервале осуществляют Движение механизма до заданной конечной скорости с ускорением, равным ускорению
10 на первом интервале J.
Недостатком известного способа является сравнительно небольшая область применения.
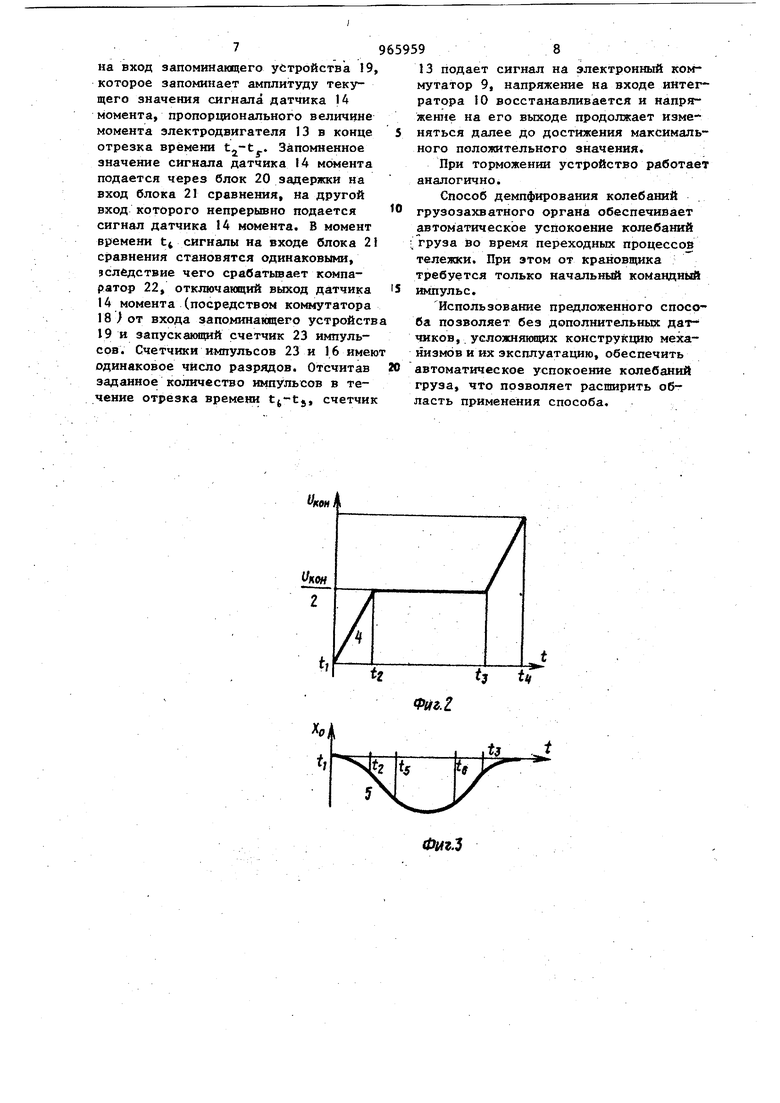
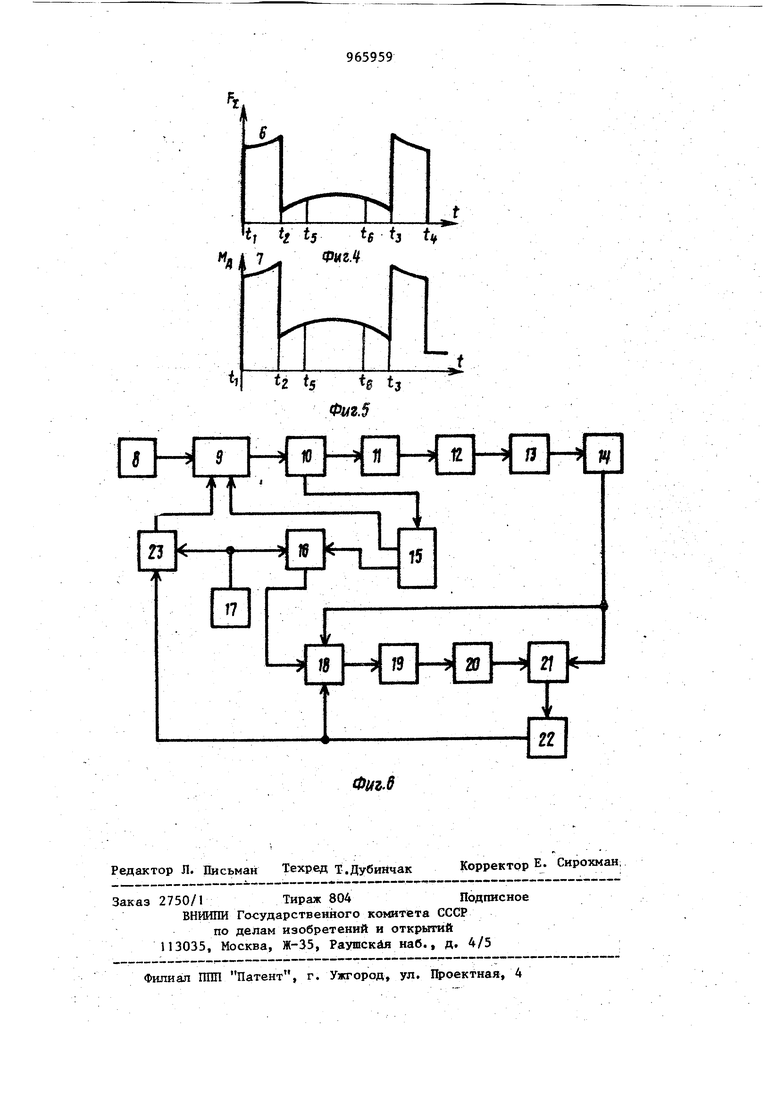
Цель изобретения - расширение области применения способа. 3 . Цель изобретения по первому вари анту достигается тем, что измеряют промежуток времени от начала движения механизма на втором интервале при возрастании или убьшании амплитуды отклонения грузозахватного оргаэа от положения равновесия, измеряют и запоминают амплитуду этого отклонения в конце указанного проме жутка времени, находят момент време ни при убьгоании или возрастании ам: плитуды отклонения грузозахватного органа от положения равновесия, ког его амплитуда вновь равна запомненной амплитуде, и обеспечивают дальнейшее протекание второго интервала от найденного момента времени в течение промежутка времени, равного измеренному. Цель изобретения по второму варианту достигается тем, что измеряю промежуток времени от.начала движения механизма на втором интервале п возрастании или убьшании амплитуды приложенной к механизму внешней силы, измеряют и запоминают амплитуду этой силы в конце указанного промежутка времени, находят момент времени при убывании или возрастании амплитуды приложенной к механизму внешней силы, когда ее амплитуда вновь равна запомненной амплитуде, и обеспечивает дальнейшее протекание второго интервала от найденного момента.времени в течение промежутк времени, равного измеренному. Цель.изобретения по третьему варианту достигается тем, что измеряют промежуток времени от начала дви жения механизма на втором интервале при возрастании или убывании амплитуды приложенного к механизму момен та привода, измеряют и запоминают амплитуду этого момента в конце указанного промежутка времени, находят момент времени при убьтании или возрастании амплитуды приложенн го к механизму момента привода, ког да его амплитуда вновь равна запомненной амплитуде, и обеспечивают дальнейшее протекание второго интер вала от найденного момента времени течение промежутка времени, равного измеренному. На фиг, 1 изображена тележка с подвешенным к ней на гибкой связи грузозахватным органом; на фнг. 2 59изменение во времени скорости механизма; на фиг. 3 - изменение величины отклонения грузозахватного органа; на фиг. 4 - изменения приложенной к механизму внешней силы; на фиг. 5 - изменение момента привода механизма; на фиг. 6 - устройство для осуществления способа, в котором из-, меряют и сравнивают амплитуды момента привода механизма на равных промежутках времени от начала и конца второго интервала движения механизма. Способ успокоения колебаний под вешенного на гибкой связи грузозахватного органа предназначен для механизма горизонтально о передви-. жения подъемно-транспортного средства, например грузовой тележки 1 крана, к которой на гибкой связи 2 подвешен грузозахватный орган 3. На фиг. 2-5 показаны соответственно кривые: 4 - изменения во времени скорости, 5 - отклонения грузозахватного органа, 6 - изменения прило- женной к механизму внешней силы, 7 изменения момента привода механизма. При разгоне тележки 1 ее движение осуществляется на трех временных интервалах , tj-tj, tg-t. На первом иитервале осуществляют движение с постоянным ускорением до достижения тележкой 1 заданной средней скорости ---- на трех интервалах, на втором интервале осуществляют движение с упомянутой средней скоростью, а на третьем интервале tj-tv; осуществляют движение тележки 1 до заданной конечной скорости v с ускорением, равным ускорению на первом интервале . Время движения тележки 1 на втором интервале определяется следующим образом. В пределах возрастакяцего участка одного из трех параметров: отклонения 5 грузозахватного органа 3, приложенной к тележке 1 внешней силы 6 или момента 7 привода тележки 1, начинают отсчет времени от начала интервала tg-tj и фиксируют промежуток времени , измеряют и запоминают амплитуду одного из трех параметров 5, 6 или 7 в конце указанного промежутка времени , находят в пределах убьшающего участка одного из трех параметров 5,6 или 7 момент времени t, когда амплитуда одного из трех параметров 5,6 или 7 равна запомненной амплитуде, и обеспечивают дальнейшее протекание второго интервала в течение промежутка времени , равного зафиксированному промежутку tj-t. Благодаря указанному закону движения в конце третьего интервала t--t4. колебания грузозахва:тного органа. 3 отсутствуют. На фиг. 6 изображено устройство для осуществления способа, в котором измеряют и сравнивают амплитуды момента привода механизма на равных промежутках времени от начала и конц второго интервала движения механизма Устройство содержит командный блок 8, выход которого подключен к одному из входов электронного коммутатора 9. Выход коммутатора 9 подклю чен на вход интегратора 10. Один из выходов интегратора 10 соединен с последовательно включенными cyMi-iaторами И, системой 12 управления электроприводом тележки, приводным электродвигателем 13 тележки и датчиком момента 14 электродвигателя тележки. Другой выход интегратора 10 подключен на вход компаратора 15, один из выходов которого подключен на один из входов счетчика 16 импуль сов. Второй выход компаратора 15 подключен на второй вход электронного коммутатора 9. На вtopoй вход счетчика 16 импульсов подключен один из выходов генератора 17 импульсов а выход счетчика 16 подключен к одному из входом электронного коммутатора 18. Выход коммутатора 18 соединен с последовательно включенными запоминающим устройством 19, блоком 20 задержки и блоком 21 сравнения. На второй вход блока 21 сравнения подключен выход датчика 14 момента приводного электродвигателя 13 тележки 1. Кроме этого, выход датчика 14 момента подключен на второй вход электронного коммутатора 18. Выход блока 21 сравнения подключён на вход компаратора 22, а выход последнего - на третий вход электронного коммутатора 18 и на оди из входов счетчика импульсов 23. На второй вход счетчика 23 подключен выход генератора импульсов 17, а вы код счетчика импульсов 23 подключен на третий вход электронного коммутатора 9. Электропривод тележки 1, содержащий систему 12 управления и электродвигатель 13, обладает следующим свойством: скорость электродвигателя 13 изменяется во времени по такому же закону, как и входное напряжение системы 12 управления, если темп . изменения этого напряжения не очень высокий (как в данном случае, так как время пуска или торможения тележки обычно составляет не менее нескольких ceкyндj. К таким электроприводам относятся системы электропривода постоянного и переменного тока с последовательной коррекцией и . подчиненным регулированием параметров . Принцип действия устройства заключается в следующем. В момент подачи управляющего сигнала от командного блока 8 на один из входов электронного коммутатора 9 напряжение на выходе интегратора 10 начинает линейно изменяться от максимального отрицательного значения до максимального положительного значения. Сумматор 11 на выходе интегратора 10 добавляет к его выходног-гу напряжению постоянную составляющую, так, что выходное напряжение сумматора 11 изменяется от нуля до максимального положительного значения. При этом скорость электродвигателя 13, а соответственно и скорость тележки 1,изменяется от нуля до конечного значения v. Компаратор 15 вьщеляет момент времени, когда выходное напряжение Интегратора 10 переходит через нуль, и посредством коммутатора 9 отключает вход интегратора.Ю от командного блока 8. Напряжение на выходе интегратора 10 остается при этом равным нулю в течение промежутка времени ,, а напряжение на выходе сумматора 11 - постоянным и равным половине максимального положительного значения, что соответствует заданной средней скорости v тележки 1 на трех интервалах. Одновременно начинает работать счетчик 16 импульсов, суммируя импульсы, вырабатываемые генератором 17 импульсов, работающим непрерывно. Сосчитав в течение отрезка времени заданное количество да1пульсов, счетчик 16 подает сигнал на один из входов электронно Q коммутатора 18. Коммутатор 18 подключает выход датчика момента 14 на вход запоминакщего устройства 19, которое запоминает амплитуду текущего значения сигнала датчика 14 момента, пропорционального величине момента электродвигателя 13 в конце отрезка времени ... Запомненное значение сигнала датчика 14 момента подается через блок 20 задержки на вход блока 21 сравнения, на другой вход которого непрерывно подается сигнал датчика 14 момента. В момент времени t сигналы на входе блока 21 сравнения становятся одинаковыми, следствие чего срабатывает компаратор 22, отключающий выход датчика 14 момента (посредством коммутатора 18) от входа запоминаюцего устройств 19и запускающий счетчик 23 импульсов. Счетчики импульсов 23 и 16 имею одинаковое число разрядов. Отсчитав заданное количество импульсов в течение отрезка времеин , счетчик
IfKOH
Xp
ty ti
J -J 13 подает сигнал на электронный коммутатор 9, напряжение на входе интегратора 10 восстанавливается и напряжение на его выходе продолжает изменяться далее до достижения максимального положительного значения. При торможении устройство работает аналогично. Способ демпфирования колебаний грузозахватного органа обеспечивает автоматическое успокоение колебаний груза во время переходных процессов тележки. При этом от крановщика требуется только начальный командный импульс. Использование предложенного способа позволяет без дополнительньк датчиков, . усложняющих конструкцию механизмов и их эксплуатацию, обеспечить автоматическое успокоение колебаний груза, что позволяет расширить область применения способа.
Ф1лг-6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3517830, кл | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
