2„ Стабилохраф по п,1, о т л и ч а ю щ и и с я тем,- что регулируемые опоры 3 являются сипьйонами,.
3., Стаб.клограф по п,1,, о т л ич а ю щ и и с я тем, что катуыки 4 , ;i индуктивных датчиков выполнены как печатные катушки с намоткой н виде спирали.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| СПОСОБ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ ТЕЛА ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325847C2 |
| СПОСОБ ПОВЫШЕНИЯ ИНФОРМАТИВНОСТИ СТАБИЛОМЕТРИЧЕСКОГО ИССЛЕДОВАНИЯ И АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2665957C2 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1966 |
|
SU183978A1 |
| СПОСОБ ДИАГНОСТИКИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2497451C1 |
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| Датчик давления | 1978 |
|
SU885845A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ | 1984 |
|
SU1840333A1 |
| Преобразователь перемещений вэлЕКТРичЕСКий СигНАл | 1976 |
|
SU798514A1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СОХРАННОСТИ ЭЛЕКТРОННОЙ ПЛОМБЫ-ЗАПОРА, ЭЛЕКТРОННАЯ ПЛОМБА-ЗАПОР И УСТРОЙСТВО ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ЕЕ СОХРАННОСТИ | 1998 |
|
RU2127911C1 |
1. СТАБИЛОГРАФ, содержащий основу и подвижную панель, между которыми смонтированы эластичные опоры и четыре индуктивных датчика, связанных кабельными пучками с электронным блоком и регистрирующим устройством, отличающийся тем, что эластичные опоры являются Фиг.1 регулируемыми опорами 3, а четыре индуктивных датчика.расположены симметрично на взаимно перпендикулярных осях отдельно и независимо от регулируемых опор 3, причем каждый из датчиков состоит из двух противоположно расположенных катушек 4,5, закрепленных с двух сторон изоляционной подставки 6, прикрепленной неподвижно к основе 1, а все индуктивные датчики имеют общий металлический диск 7, прикрепленный регулируемыми винтами 8 к нижней стороне подвижной панели 2 на расстоянии от основы 1, причем регулируемые опоры 3, расположены в гнездах 9, которые смонтированы противоположно основе 1 и подвижной панели 2 и связаны с (Л системой с регулируемым давлением 10-12.. х СП
Кзсбрегенке относится к стабило графуj приненяеному в медицине при неврологических и психологических исследонаниял людей..
Известен стабнлограф,, содержащий ocFiOBy и подвижную панель f. мексу KOTOpbii iK смонтированы четыре эластичные опоры (металлические кольца ) и цактрирующие направляющие, l-la подвижкой панели обозначено место, где становится исследуемый,, К эластичным опорам прикреплены четыре электромахнитных преобразователя; (датчика )j связанных кабельными пучками с электронным блоком и регистриругощигу; устройством о
Известен также стабилограф, содержзддйй ОСнову и подвижнуга панель. между которыми смонтированы три Н.г-п четыре опоры с датчиками и олна или более центрируюмще направляюидквг
С; т а,б ил о Гр асон д е йо т н у ю т ел ед у ющим
Образом,
Ис; ;ладуе1лый становится на обозначзккое ;. на подвижной панели. Получет-1нкй ллектрический сигнал от датчиков иро;;Орпионален колебаниям центра тяжести пациента. Этот сигнал усилизается к обрабатывается электронныь-г блоком, после чего подается к регистрир; тощему устройству которое производит оценку неврологического и психологического состояния исслеуемого,.
Недостатками таких стабилографов являются (гевоэможность компенсации веса, наследуемого при сохранении одной i; той ;ae чувствительности подзкжьой панели и кевозможнооть исследованкя активности одного и того же Объекта ггри рэ.зхшчной чувствительности подвижной панели-.
Целью кэобретения является возможность ко1 итенсацяи веса исследуемого При сохранекии одной и той же чувствительности подвижной панели, а та.кже исследование посторографной i активности одного к того же объек7.а прк раэг:их4ной чувствительности подвижной панели
Целью изобретения является невоз локность компенсации веса исследуемого хтрк с:окраненки одной и той же
чувствительности подвижной панели, а также исследование просторографной активности одного и того же объекта при различной чувстБИтельности подвижной панели.
Эта цель достигается тем, что в стабилографе, содержащем основу и подвижную панель, между которыми . смонтированы регулируемые опоры и четыре индуктивных датчика, расположенных сиг/лузетрично на взаимно перпендикулярных осях, отдельно и независимо от регулируег/ ых опор, каждый датчик состоит из двух расположенных одна против другой катушек, прикрепленных с двух сторон к изоляционной подставкеf неподвижно прикрепленной к основе. Общий для индуктивных датчиков металлический диск закреплен регулируемыми винтами на нижней стороне подвижной панели,
Регулируемые опоры могут быть пневматическими, гидравлическими или в виде сильфоноБ, расположенных в гнездахf прикрепленных к основе и к подвижной панели, причем они связаны с системой с регулируемым давлением.
Индуктивные датчики связаны посредством кабельных пучков с электронным блоком к регулирующим устройством, Катуижи датчиков могут быть выполнены в виде печатных катушек с намоткой в виде спирали.
Предложенный стабилограф позволяет компенсирЪвать вес исследуемого при сохранении одной и той же чувствительности подвижной панели, а также ксследовать посторографную Елтивность одного И того же объекта при различной чувствительности подвижной панели без точной регулировки прикрепления подвижной панели к основе о При увеличении количества опор увеличивается собственная резонансная частота подвижной механической системы,
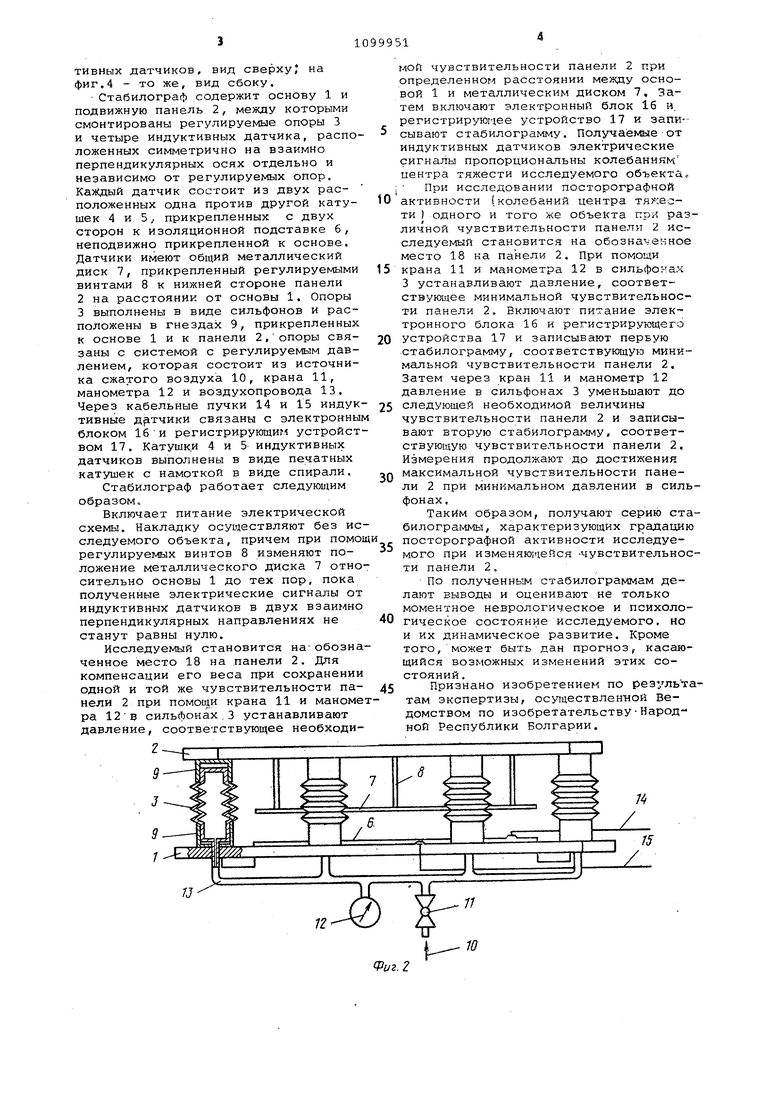
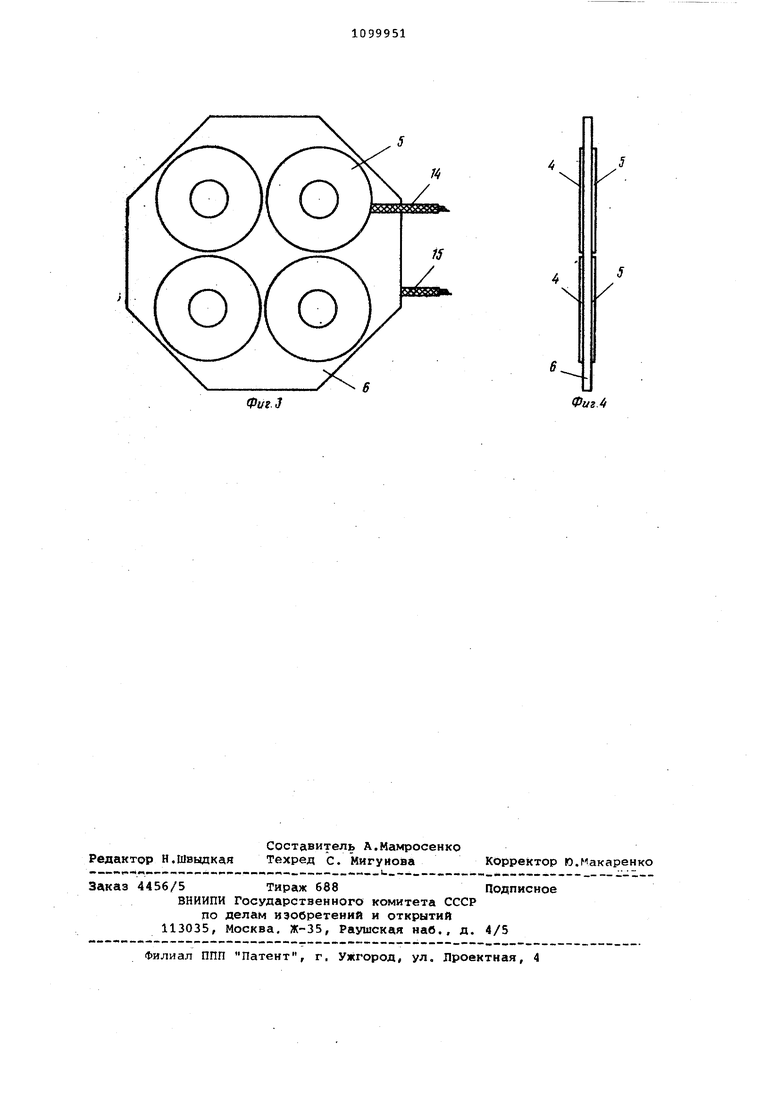
На фиг,1 представлена схема предложенного стабилограЛа, вид сверху с частичными разрезами; на фиг.2 тс же, вид сбоку с частичным поперечньм разрезом; на фиг,3 - изоляционная -Подставка с катушками индуктивных датчиков, вид сверху на фиг.4 - то же, вид сбоку. Стабилограф содержит основу 1 и подвижную панель 2, между которыми смонтированы регулируемые опоры 3 и четыре индуктивных датчика, распо ложенных симметрично на взаимно перпендикулярных осях отдельно и независимо от регулируемых опор. Каждый датчик состоит из двух расположенных одна против другой катушек 4 и 5, прикрепленных с двух сторон к изоляционной подставке б, неподвижно прикрепленной к основе. Датчики имеют общий металлический диск 7, прикрепленный регулируемыми винтами 8 к нижней стороне панели 2на расстоянии от основы 1. Опоры 3выполнены в виде сильфонов и расположены в гнездах 9, прикрепленных к основе 1 и к панели 2,опоры связаны с системой с регулируемым давлением, которая состоит из источника сжатого воздуха 10, крана 11, манометра 12 и воздухопровода 13. Через кабельные пучки 14 и 15 индук тивные датчики связаны с электронны блоком 16И регистрирующим устройст вом 17. Катушки 4 и 5 индуктивных датчиков выполнены в виде печатных катушек с намоткой в виде спирали. Стабилограф работает следующим образом. Включает питание электрической схемы. Накладку осуществляют без ис следуемого объекта, причем при помо регулируемых винтов 8 изменяют положение металлического дмска 7 отно сительно основы 1 до тех пор, пока полученные электрические сигналы от индуктивных датчиков в двух взаимно перпендикулярных направлениях не станут равны нулю. Исследуемый становится на- обозна ченное место 18 на панели 2. Для компенсации его веса при сохранении одной и той же чувствительности панели 2 при помощи крана 11 и маноме ра 12В сильфонах.3 устанавливают давление, соответствующее необходимой чувствительности панели 2 при определенном расстоянии между основой 1 и металлическим диском 7. Затем включают электронный блок 16 и. регистрирую11ее устройство 17 и запи-сывают cтaбилoгpaм ty. Получаемые от индуктивных датчиков электрические сигналы пропорциональны колебаниям центра тяжести исследуемого объекта, ; При исследовании посторографной активности (колебаний центра тя -сести ) одного и того же объекта при различной чувствительности панели 2 исследуемый становится на обозначенное место 18 на панели 2. При помощи крана 11 и манометра 12 в сильфонах 3 устанавливают давление, соответствуюь-дее минимальной чувствительности панели 2. Включают питание электронного блока 16 и регистрирующего устройства 17 и записывают первую стабилограмму, соответствующую минимальной чувствительности панели 2. Затем через кран 11 и манометр 12 давление в сильфонах 3 уменьшают до следующей необходимой величины чувствительности панели 2 и записывают вторую стабилограмму, соответствующую чувствительности панели 2, Измерения продолжают до достижения максимальной чувствительности панели 2 при минимальном давлении в сильфонах. Таким образом, получают серию стабилограг 1мы, характеризующих градацию посторографной активности исследуемого при изменяющейся -чувствительности панели 2. По полученным стабилограммам делают выводы и оценивают не только моментное неврологическое и психологическое состояние исследуемого, ко и их динамическое развитие. Кроме того, может быть дан прогноз, касающийся возможных изменений этих состояний . Признано изобретением по результатам экспертизы, осуществленной Ведомством по изобретательству - Народной Республики Болгарии.
Фиг 3
Фиг4
