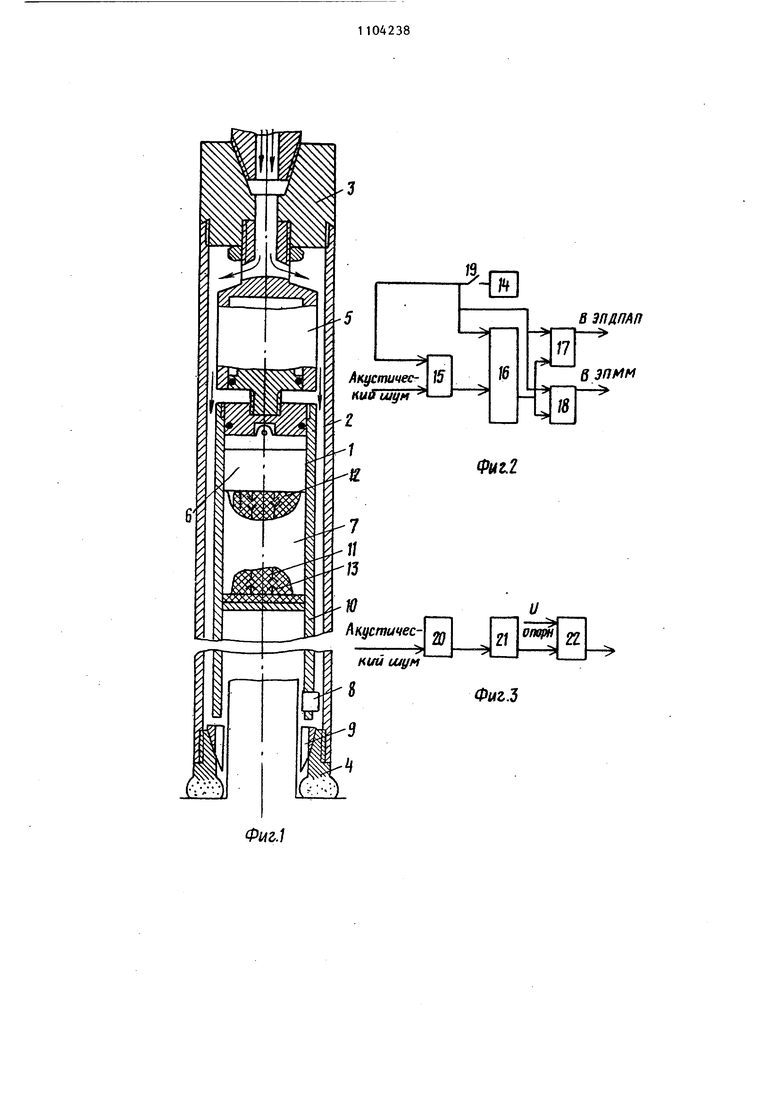
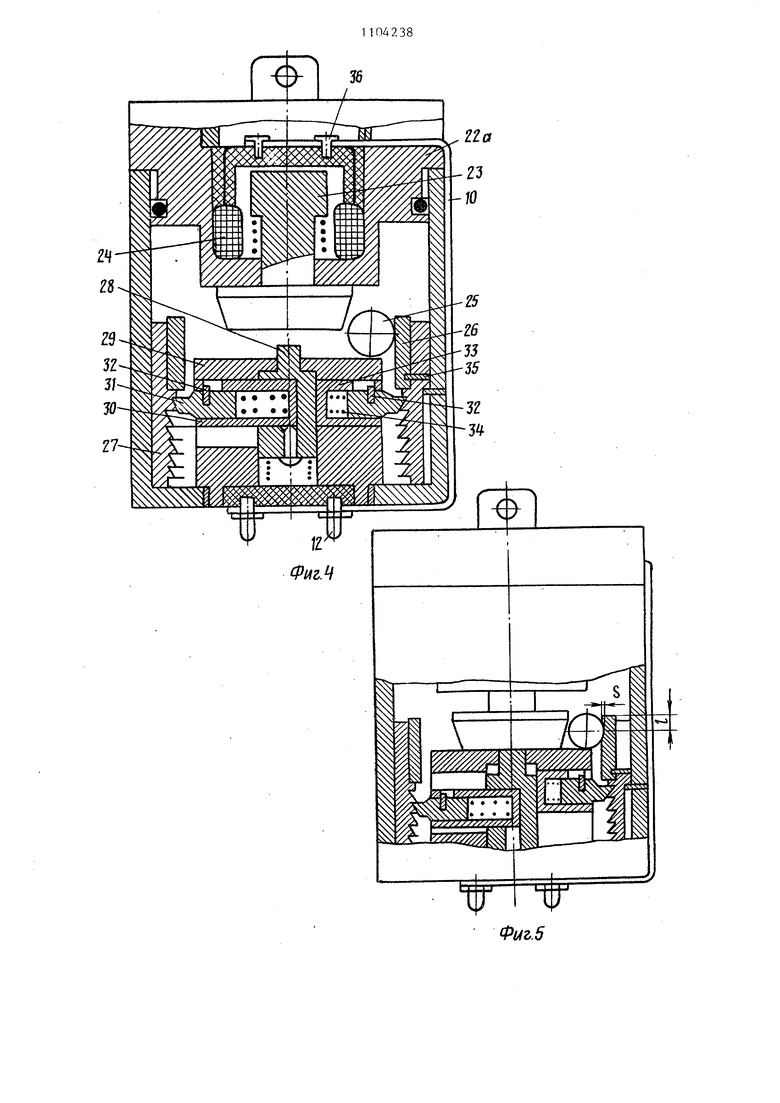
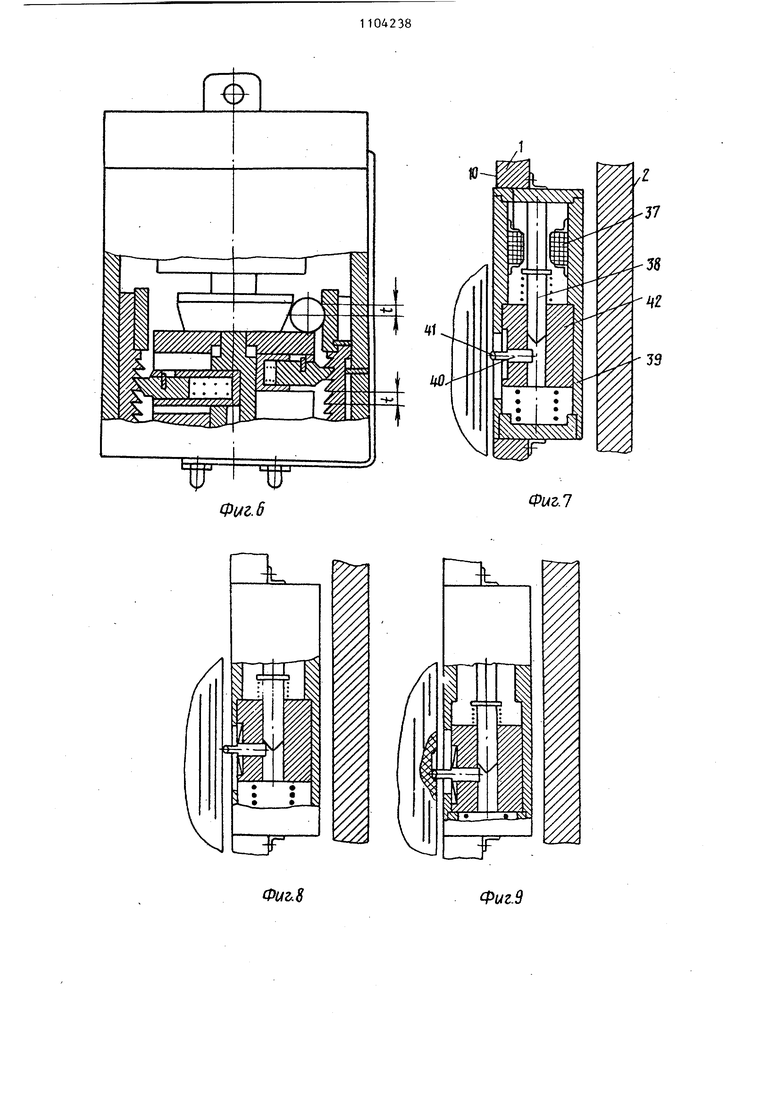
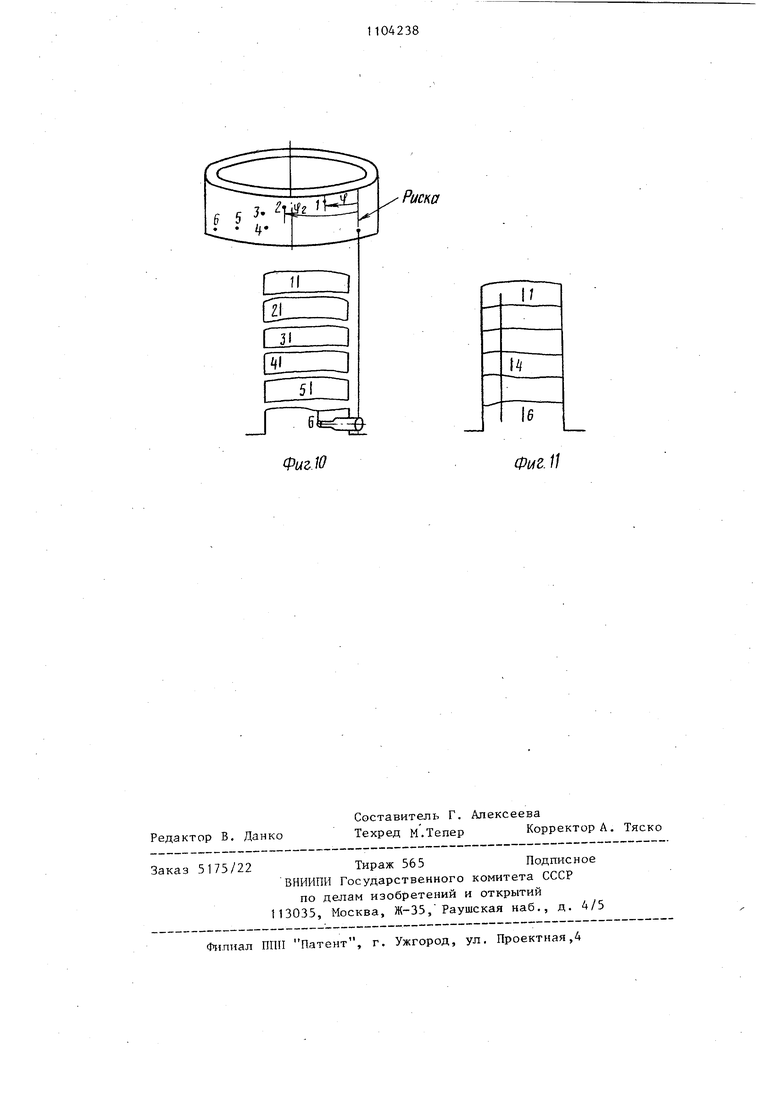
1 Изобретение относится к области горного дела, а именно к средствам для отбора ориентированного керна с многократным нанесением и регистрацией положения меток при колонковом бурении наклонных скважин. Известны устройства для ориентирования керна в течение рейса, содержащие наружную колонковую трубу с резцом для нанесения меток на керн и устройство для регистрации их положения относительно апсидальной плоскости, в которых используется ав тономное электропитание для привода движения фотопленки и включения осветительной лампочки, причем настрой ка на определенные интервалы срабаты вания этих элементов происходит до бурения, т.е. на поверхности 1 . К недостаткам устройств с настрой кой на поверхности следует отнести невозможность получения ориентирова ного, керна точно на заданной глубин (т.е. отсутствует оперативное управ ление керноориентатором), и, кроме того, существует риск холостых съемок во время случайных остановок бурового снаряда, так как приводной механизм фотоаппарата продолжает ра ботать. Известно устройство с механическ регистрацией положения апсидальной плоскости и метки, содержащее наруж ную трубу, внутреннюю керноприемную трубу с механизмом для нанесения метки на керн, перемещаемым действи ем давления промывочной жидкости, а также их регистрацией в датчике положения апсидальной плоскости, в ко тором пята, движущаяся от того же давления, вминает свободный шарик в регистрирующий элемент из мягкого металла 2 . i К недостаткам известного устройства следует отнести установку над внутренней трубой дроссельной втулк уменьшающей сечение канала для прохода промывочной жидкости, что необходимо для создания достаточного (причем значительного) перепада дав ления . При применении сравнительно вязких растворов это служит предпоСЫТ1КОЙ защламования нагнетательного канала и прекращения процесса бурения. Кроме того, в устройстве существует возможность несинхронности нанесения метки и ее регистра:ции, а пто способствует из-за радиаль2382ных флуктуации внутренней трубы при ее постепенной подаче неточному определению апсидальной плоскости. При этом увеличение расхода промывочной жидкости при операции регистрации приводит к усилению вибрации в датчике положения апсидальной плоскости, а значит также мешает шарику занять точное положение в апсидальной плоскости. Целью изобретения является повышение точности и надежности работы керноориентатора. Указанная цель достигается тем, что керноориентатор многократного действия, содержащий наружную трубу, соединенную одним концом с переходником, вторым - с коронкой, внутреннюю керноприемную трубу с маркировочным механизмом и датчиком положения апсидальной плоскости с подвижной пятой, снабжен установленным во внутренней трубе под датчиком положения апсидальной плоскости конвейером с блоком управления датчика и маркировочного механизма, при этом блок управления включает автономньй источник питания, связанньй через выключатель с логическим блоком и с входом цифрового датчика режима, состоящего из последовательно соединенных электроакустического преобразователя, детектора и схемы сравнения, а выход ЦИФРОВОГО датчика режима подключен к логическому блоку, соединенному со связанными межцу собой схемами управления электромагнитными приводами датчика положения апсидальной плоскости и маркировочного механизма, к которым подключен через выключатель автономный источник питания. При этом маркировочный механизм выполнен в виде, размещенного во внутренней трубе корпуса с прорезью и полостью внутри, в которой размещены подпружиненный относительно втулки шток, подпружиненной относительно корпуса, при этом во втулке подвижно установлен отметчик, взаимодействующии со штоком, На фиг.1 Изображен керноориентатор, общий вид в разрезе; на фиг.2 блок управления датчика положения апсидальной плоскости; на фиг.З блок-схема цифрового датчика режимаJ на фиг.4 - датчик положения апсидальной плоскости в нерабочем положенин, разрез; на фиг.5 - то же, в момент получения первого отпечатка шарика в апсидальной плоскости на регистрирующем элементе; на фиг.6 - то же, в момент получения второго отпечатка; на фиг. 7 - марки ровочный механизм в нерабочем положении, разрез; на фиг. 8 - то же, в момент первого касания отметчиком керна; на фиг. 9 - то же, в положаНИИ после нанесения метки, на фиг.10 - схема взаимного расположения отпечатков, шарика в апсидальной плоскости на регистрирующем элементе и меток на керне, на фиг.11 образец ориентированного керна. Керноориентатор содержит (фиг.1) внутреннюю невращающуюся в. процессе бурения трубу 1, наружную трубу 2 с переходником 3 и коронкой 4. Труба 1 связана с переходником подшипниковым узлом 5 и содержит непроворачиваемые в ней датчик 6 положения апсидальной плоскости и контейнер 7 с блоком управления датчика положания апсидальной плоскости и маркировочного механизма 8. В конической расточке 4 находится рвательное кольцо 9. Датчик положения апсидальной плоскости и маркировочный механизм соединены подводяи91ми приводами 10 с контактными гнездами 11 контейнера соответственно через контактны штыри 12 и 13, причем последние заделаны в изоляционную прокладку, укрепленную на переборке трубы 1, и защищены от попадания жидкости. Пары штырь-гнездо служат для создания общей электрической цепи сборки: датчик положения апсидальной плоскости, контейнер, маркировочный механизм. Блок управления в контейнере 7 (фиг.2) включает в себя автономный источник 14 пита|1пя,цифровой датчик 15 режима (ДР),логический блок 16,схемы управления электромаг нитными приводами датчика положения апсидальной плоскости 17 и маркировочного механизма 18, а также кнопк 19 с замь1кающим контактом,выступающ над верхним торцом контейнера (жирные линии показывают энергетическую, а тонкие - информационную цепь). Цифровой датчик режима собран, например, по следующей схеме (фиг.З электроакустический преобразователь 20j детектор 21 и схема 22 сравнения . Датчик положения апсидальной плоскости содержит (фиг.4) крышку 22 Q, подпружиненную пяту 23 с конической (например, под углом З) нижней частью, катушку 24 электромагнитного привода (совокупность пяты 23 и катушки 24 представляет собой электромагнитный привод датчика положения апсидальной плоскости) . Ниже катушки пята выполнена из, немагнитного материала. Датчик положения апсидальной плоскости содержит также свободный шарик 25, съемный регистрирующий элемент 26 из мягкого металла, имеющий риску (фиг.10), и механизм рассредоточения отпечатков шарика на регистрирующем элементе, включающий цилиндрический держатель 27, на внутренней поверхности которого с равным шагом t по высоте выбрано заданное число канавок (для простоты показано 6), подпружиненную тягу 28, стойку 29, связанный с тягой подвижный фиксатор, включающий обойму 30 и подвижную собачку 31, удерживаемую от проворота штифтом 32 с возможностью ее движения в продольной прорези обоймы, и связанньш со стойкой 29 неподвижный фиксатор, .включающий обойму 33, собачку 34 и аналогичный предьщущему штифт 32. Собачки 31 и 34 установлены с возможностью взаимсздействия с канавками держателя 27. Штифты 35 для держателя и элемента 26 обеспечивают постоянное нахождение риски последнего в одной плоскости с наносимыми на керн метками. Подводяшле провода 10 подсоединяются к заизолированным клеммам 36 катушки 24 и (с некоторой слабиной) к штырям 12, закрепленным на изоляционной прокладке. За цикл срабатывания датчика положения апсидальной плоскости принимается опускание и подъем пяты, при опускании которой до соприкосновения с верхним торцом стойки 29 шарик может вдавливаться во внутреннюю поверхность элемента на заданную глубину отпечатка S (фиг.5). Маркировочный механизм (фиг.7) содержит катушку 37 электромагнитного привода и подпружиненный шток 38 (совокупность штока 38 и катушки 37 представляет собой электромагнитный привод маркировочного механизма) . Ниже катушки шток вьшолнен из немагнитного материала. Маркировочный механизм содержит также корпус 39 с прорезью, в которой может перемещаться, подпружиненный (например плоской пружиной) механический отметчик 40 с режущей вершиной 41 (например, в виде зачеканенного керна алмаза), закрепленный в юдпружиненной втулке 42, причем пружина послед ней имеет большую жесткость, чем жесткость пружины штока 38. Устройство работает следующим об разом. После сборки с контейнером (постоянно находящимся в трубе 1, пока не источится питание) кнопка 19 утап ливается и включает аппаратуру упра ления, логическая схема 16 устанавли вается в исходное состояние, т.е. н ожидание команды на срабатывание датчика положения апсидальной плоскости и маркировочного механизма. Взаимное расположение в сборке контактных пар штырь-гнездо обеспечива постоянное нахождение в одной плоскости отметчика 40 и риски на регис рирующем элементе 26. В операции бурения на преобразов тель 20 поступает акустический шум от работающих механизмов бурового станка, бурового насоса, трения коронки о забой и т.д. Преобразовател преобразует этот шум в переменное электрическое напряжение, поступающее на детектор 21, где оно выпрямл ется. Уровень вьшрямленного постоян ного напряжения на выходе детектора 21 пропорционален уровню акустического шума. Это напряжение поступает на схему 22 сравнения, на другой вход которой подается опорное напря жение , причем схема датчика режима настроена так (регулировкой опорч Ь что при работающих станке и насосе напряжение на выходе де тектора всегда больше опорного, и датчик режима выдает сигнал логичес кого О, что свидетельствует о режиме бурения. Операция нанесения метки (срабаты вание маркировочного механизма) и регистрации для нее положения апсидальной плоскости (срабатывание датч fca положения апсидальной плоскости) происходит по команде, которая представляет собой совокупность, например, следующих действий выключение двигателей насоса и станстический шум, включение этих двигателей, повторное их выключение. Все эти действия должны выполняться в течение определенного времени, например 1 мин. Срабатывание маркировочного механизма и датчика положения апсидальной плоскости происходит через некоторое время, например 30с после подачи команды, т.е. после повторного выключения двигателей. Блик управления в операции нанесения и регистрации метки работает следуюш 1м образом. Уровень напряжения на выходе детектора 21 при пропадании акустического шума от агрегатов и связанных с ними шумов на забое резко уменьшается, становясь меньше (могут остаться лишь случайные шумы, однако они не окажут влияния на работу схемы 22 .сравнения, так как опорное напряжение выбрано заведомо большим, чем напряжение на выходе детектора, соответствующее любым шумам, не связанным с работой агрегатов) , и схема 22 вырабатывает в схему 16 сигнал логической 1, что свидетельствует об отсутствии режима бурения. По появлении этой 1 схема 16 начинает ожидать вторичного появления 1 с датчика режима (которая формируется при включении и выключении двигателей) в течение некоторого времени, например 1 мин (повторение сигнала с датчика режима нужно, чтобы отстроиться от исчезновения шума, не связанного с командой нанесения и регистрации, например из-за внезапного отключения электроэнергии на буровой и т.д.). Если в течение 1 мин с датчика режима 1 не поступит, логическая схема возвращается в исходное состояние. При поступлении же 1 (т.е. повторном включении и выключении двигателей) логический блок с некоторой задержкой, например 30с (это время необходимо для успокоения шарика 25 в датчик положения апсидальной плоскости после снятия вибраций, причем в течение 30с логическая 1 с датчика режима не должна сниматься, т.е. не должны включаться двигатели, в противном случае схема 16 переходит в исходное состояние), вырабатывает сигнал в блоки 17 и 18 управления. посылающие по этому сигналу импульс тока в катушки 37 и 24, что позволя соответственно нанести метку на кер и зарегистрировать для нее положени апсидапьной плоскости. Метод кодирования команды Для ло гического блока 16 практически искл чает ложное срабатывание маркировоч ного механизма и датчика положения апсидальной плоскости (в том числе и после первоначальной подачи питания) при управлении работой керноориентатора с поверхности. Маркировочный механизм производи нанесение метки на керне следующим образом. Шток 38 (фиг.7) под действием электромагнитных сил движется вниз, отодвигая своей конической частью от метчик 40 в сторону до упора последнего своей вершиной 41 в цилиндричес кую поверхность керна (фиг.8). Дпина отметчика выбрана такой, что даже при максимальном его ходе (л, мм) он своей тыльной частью застопорит ход штока в подпружиненной втулке 42, которая в момент указанного стопорения (до этого она стояла на месте из-за большей жесткости своей пружины, чем штока) также начинает вместе с отметчиком движение вниз до упора в ограничитель корпуса 39 (фиг.9). Величина хода втулки 7 мм Срабатывание маркировочного меха- низма позволяет нанести на поверхности керна метку в виде неглубокой царапины. После нанесения меток все подвижные элементы маркировочного механизма под действием своих пружин возвращаются в исходное положение. Регистрация в датчике положения апсидальной плоскости нанесенной метки происходит следующим образом. Под действием электромагнитных сил пята 23, опускаясь до упора в верхний торец стойки 29, своей конической частью вдавливает шарик в элемент 26 на расстояние от его верхнего края (фиг.5),а нижней плоскостью утапливает выступающий конец тяги 28 на величину, несколько большую шага t. При этом в связанном с тягой подвижном фиксаторе собачка 31, утопленная в исходном положении в первой сверху канавке держателя 27 (фиг.4), испьп-ывает на своем скосе (например, под углом АЗ) силу, отодвигающую ее к продольной оси датчика, в результате 388 чего собачка перескакивает в следующую нижележащую канавку держателя. Штифт 32, закрепленный в собачке и движущийся в прорези обоймы 30, сохраняет неизменным взаимное положение канавки и скоса собачки. После получения отпечатка пята под действием своей пружины поднимается в исходное положение, тяга 28 своей пружиной также перемещается, вверх, и при этом собачка 31, упираясь в верхнюю плоскость второй сверху канавки, поднимает на шаг дед)жатель, а вместе с ним и эяемент 26. Собачка 34 неподвижного фиксатора при движении держателя вверх своим скосом (например, под углом 45 ) отодвигается к продольной оси датчика, затем перескакивает в следующую нижележащую канавку и фиксируется пружиной в этом положении. При новом цикле нанесения метки находяш гйся в апсидальной плоскости шарик вдавливается в элемент 26 на высоте В +t от его верхнего края (фиг.6). Кинематика последуюи(их циклов повторяется (третий отпечаток наносится на высоте Е+2t и т.д.),причем взаимодействие подвиж)1ого и неподвижного фиксаторов с держателем обеспечивает его последовательньй ход (с шагом t) только вверх (ход вниз стопорится неподвижным фиксатором) . В заключительном цикле срабатывания фиксаторы выходят из самой нижней канавки. После срыва керна, осуществляемого подачей снаряда вверх с заклиниванием рвательного кольца в конической проточке коронки, керноориентатор поднимается на поверхность. При рассоединении датчика положения апсидальной плоскости и контейнера кнопка 19 обесточивает блок управления. Из атчика положения апсидальной плоскости извлекается держатель с регитрирующим элементом. Для нанесения на выбуренном поднятом на поверхность керне слеа апсидальной плоскости скважины о отдельным меткам и соответствуюим им отпечаткам на элементе 26 еобходимо замерить, например по асовой стрелке, углы q,- Cf между иской на элементе и центрами отпеатков и последовательно отложить х на кусках, керна в том же направении (фиг.10). 911 Для подготовки устройства к следующему отбору ориентированного керна специальным стаканом (не показан), надеваемым на стойку 29, с внутренней конической расточкой и прорезями для фиксаторов утапливают собачки последних к центру датчика.Потом держатель с новым элементом 26 опускается до упора в дно датчика положения апсидальной плоскости.Стакан извлекают, собачки расходятся и входят в верхнюю канавку держателя.После нав чивания крышки 22 а датчика подводящие провода 10 закрепляются на соответствующих контактах штыря 12. Датчик положения апсидальной плоскости сочленяется с контейнером, и керноориентатор подготовлен к новому циклу отбора ориентированного керна. Исключение дроссельной втулки на внутренней трубой, необходимой для создания значительного перепада дав 8 Ленин в операциях нанесения меток и срыва керна, устраняет риск зашламования нагнетательного канала и остановки процесса бурения из-за включения керноориентатора в состав бурового снаряда, а следовательно, повьшает надежность работы самого прибора. Практически синхронное нанесение метки и регистрация ее в датчике жения апсидальной плоскости из-за отсутствия движения внутренней трубы и мгновенного срабатывания обоих электромагнитных проводов, а также снижение вибрации в момент регистрации метки благодаря вык.-.очению станка и насоса повышает точность определения положения апсидальной плоскости. При этом повьшгается эффективность применения керноориентатора, что позволяет бурить меньшее количество скважин, чем достигается большой экономический эффект.
В ЗПЛПАП
Ф(г,.6
1
-37
-5в -Ц2
NH
39
§
Фиг.1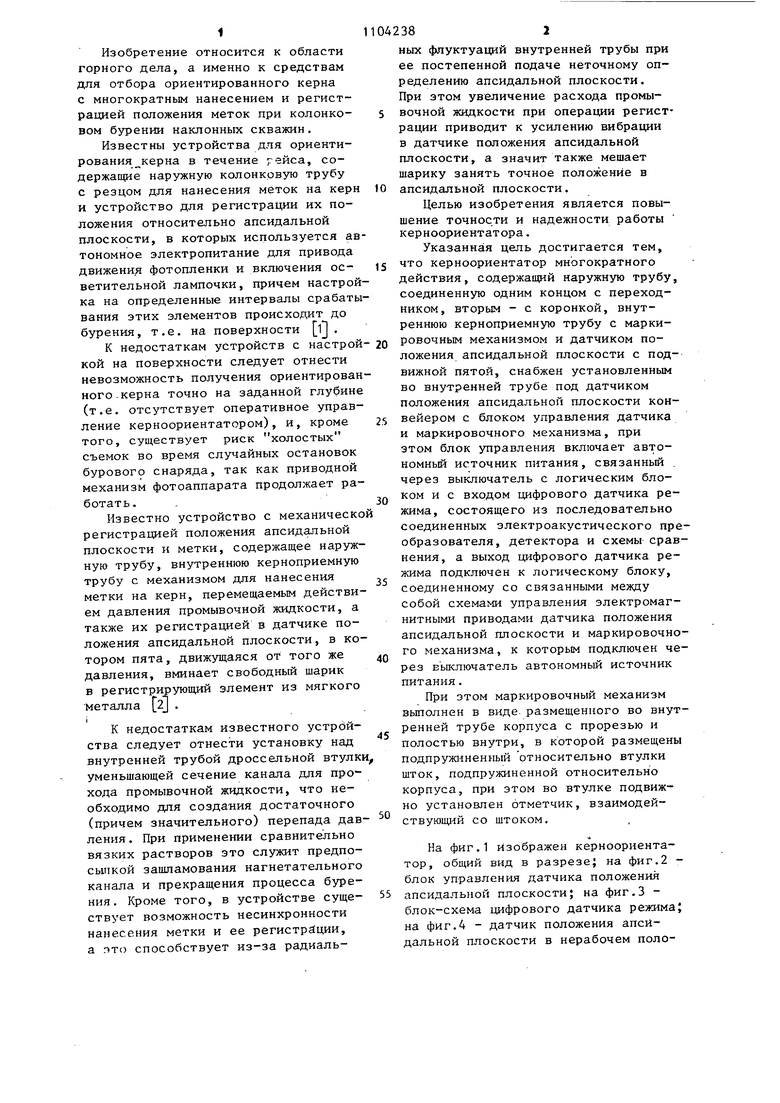


| название | год | авторы | номер документа |
|---|---|---|---|
| Керноориентатор многократного действия | 1983 |
|
SU1154432A1 |
| Устройство для отбора ориентированного керна | 1980 |
|
SU883321A1 |
| Устройство для отбора ориентированного керна из скважины | 2002 |
|
RU2225495C2 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ОРИЕНТИРОВАННОГО «ЕРНА. | 1979 |
|
SU825883A1 |
| Разметочное устройство для керноориентатора | 1981 |
|
SU996717A1 |
| Устройство для отбора многократноориентированного керна | 1983 |
|
SU1087652A1 |
| БУРОВОЙ СНАРЯД ДЛЯ ОТБОРА ОРИЕНТИРОВАННОГО КЕРНА | 2003 |
|
RU2250981C1 |
| Керноориентатор | 1988 |
|
SU1559099A1 |
| Устройство для отбора ориентированного керна | 1984 |
|
SU1219780A1 |
| БУРОВОЙ СНАРЯД ДЛЯ ОТБОРА ОРИЕНТИРОВАННОГО КЕРНА | 2003 |
|
RU2253006C1 |
1. КЕРНООРИЕНТАТОР МНОГОКРАТНОГО ДЕЙСТВИЯ, содержащий наружную трубу, соединенную одним концом с переходником, другим - с воронкой, внутреннюю керноприемную трубу с маркировочным механизмом и датчиком положения апсидальной плоскости с подвижной пятой, отличающийся тем, что, с целью повышения точности и надежности в работе, он снабжен установленным во внутренней трубе под датчиком положения апсидальной плоскости контейнером с блоком управления датчика и маркировочного механизма, при этом блок управления включает автономный источник питания, связанный через выключатель с логическим блоком и входом цифрового датчика режима, состоящего из последовательно соединенных электроакустического преобразователя, детектора и схемы сравнения, а выход цифрового датчика режима подключен к логическому блоку, соединенному со связанными между собой схемами управления электромагнитными приводами датчика положения апсидальной плоскости и маркировочного механизма, к которым подключен i через выключатель автономный источник питания. (Л .2. Керноориентатор по п.1, о тличающийсй тем, что маркировочный механизм выполнен в виде размещенного во внутренней трубе корпуса с прорезью и полостью внутри, в которой размещен подпружиненный относительно втулки, подпружиненной относи.ельно корпуса, шток при этом во втулке подвижно установлен от4 ND метчик, взаимодействующий со штоком. 00 00
Фиг,. 8
Фиг.9
//yfw
HI 1
onz::
г 31 1
-J
ii
ста
&I
we./
I/
U
16
W2. //
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3450216, кл | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР П.О заявке № 3211659/22-03, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
