-f
О
ЦГЕВА
ел
7/

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения температуры и механических усилий | 1982 |
|
SU1045006A1 |
| Измерительный частотно-импульсный преобразователь | 1985 |
|
SU1302149A1 |
| Устройство для измерения температуры и механических усилий | 1981 |
|
SU998874A1 |
| Двухпараметровый частотный измерительный преобразователь | 1980 |
|
SU900126A1 |
| Измерительный частотный преобразователь | 1982 |
|
SU1068739A2 |
| Пьезоэлектрический преобразователь | 1984 |
|
SU1262307A1 |
| Измерительный частотный преобразователь | 1979 |
|
SU879333A1 |
| Пьезоэлектрический преобразователь | 1979 |
|
SU777482A1 |
| ЦИФРОВОЙ ТЕРМОМЕТР | 2006 |
|
RU2328710C1 |
| Многоканальный цифровой термометр | 1982 |
|
SU1281924A1 |
ПЬЕЗОРЕЗОНАНСНЫЙ ДАТЧИК СИПЫ И ТЕШЕРАТУРЫ, содержащий два пьезоэлемента, укрепленных на упругом элементе и включеннгмх в схемы автогенераторов, соединенных с помощью преобразователей частота код с вычислительным блоком, связанным с блоком памяти, о т л и ч а ю П1 и и с я тем, что, с целью повышения точности путем учета взаимного влияния сило- и температурочувствительности пьезорезонаторов, в него введены привод возвратно-вращательного движения упругого элемента, два фиксатора и устройство управления, связанное с приводом, преобразователями частота - код и вычислительным блоком, при этом привод связан с упругим элементом, установленным с возможностью вращения на 180 вокруг своей оси между двумя фиксаторами, а пьезорезонаторы размещены параллельно оси вращения.
Фиг.1
1
}i3fiRporriiИР очиогится К Я1мс1;и - телыюй технякс и может Зьггь исг ользоялио для одионрсмсгитго ичмррекия силы и температуры, л также- приводимых к гим физических величин.
Извест Ы цяффереициал1,;ы( /f,лтчик силы, Содержлщнс дифферснгшалгзно включенные чупстпительные элементы :
Нед ос татками устроГтстп л яг1лякггся н е в о 3 мож i о с ть о д н о н р с и i (л с. : ; з м е рения двух параметроп, л гакж( недостаточная точность измеренпй .
Наиболее близким к изобрртен1чо по технической сущности янляется пьезорезо11а :снь(й ;;ат-;ик с;илг;1 и температуры, с одержащш : дг)а пьезоолемента, укрегле1ИП)1е нл упругом олементе и включенные з atrroieнераторон 5 с:ое;гине нн.ых с помочп ю преобразог ателей частота - код с Р1ычис.пито.,ным блоюм, снязанн1ям с блоком памяти 2 .
Не; IO с т а т ком и з и е с н о; о у с т р о i стпл является то, что оно не уч1-;тывает сопряже( 31|)4)екты чугк.тиител ностеГ.
UejnjKi изобретения ярзляется iioiihilUOHHe To4ntn in пусе-м учета лзаимноГО П-ПИЯНИЯ сило- и Te 1Пep TУp(5Чy Rс т ви т е.г f н (1 г т и п ь е з п ;п з о н а т о ; о н ,
Пень лостига(.л-ся тем, чтс з и,езрезонансный датчик сил) и TCMifliM-aTypi.i, со;1ержа1ций ,т,на .чемента , укрепленных на ynpyiON; элементе и включенн1,Х в схемь агггогеиерагорон, спсдине(игых с rioMcujiiiHi iipeooijajonaтелей часто.та - код е нычислитг:льны блоком, срязаньч м с б ;оКом памяти, введены п р и в (i д в о з нр- а т н сэ - н р а in. а т е л , него движения угфугого злемен-iM, два фиксатора и устроГитно управления, с)5язанно( с приводом,, преобразователями част(гга - ко,д и
вычислител И1ым блоком, 11Л1 :УГОУ привод связан, с: упругим зл емгчггом, установленнь7-; : возм( тью нпгицекия на 180 нокруг своей оси двумя ф iкcaтop,,И .
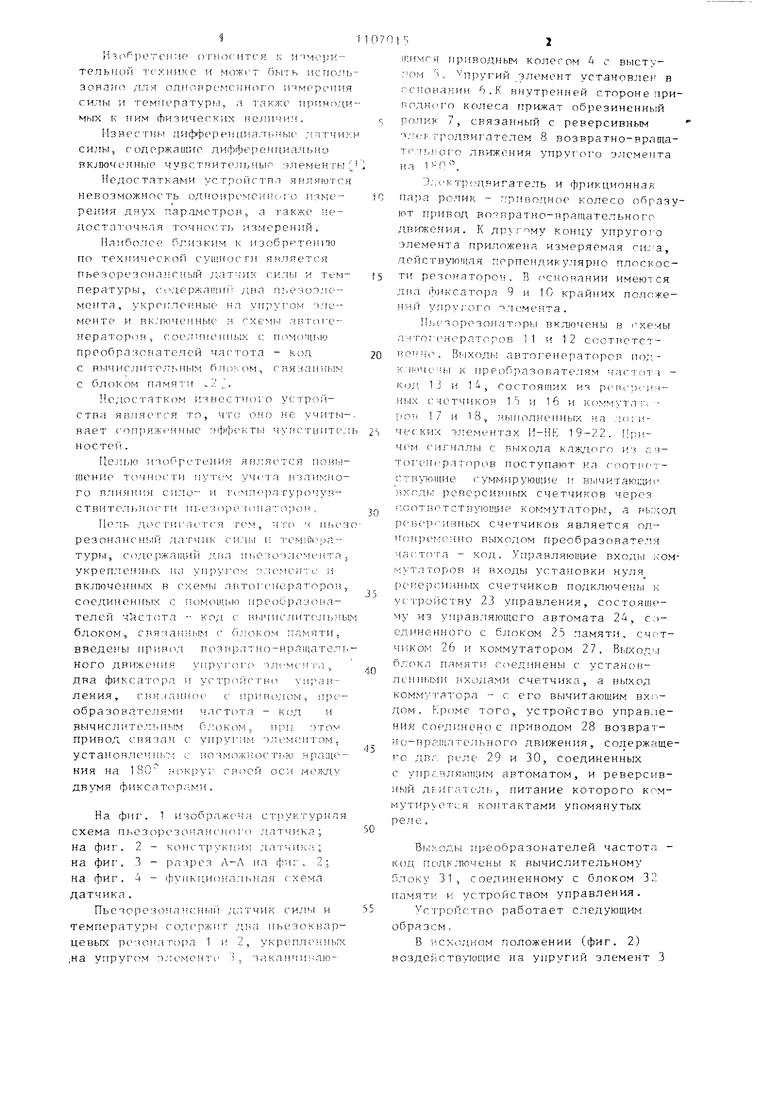
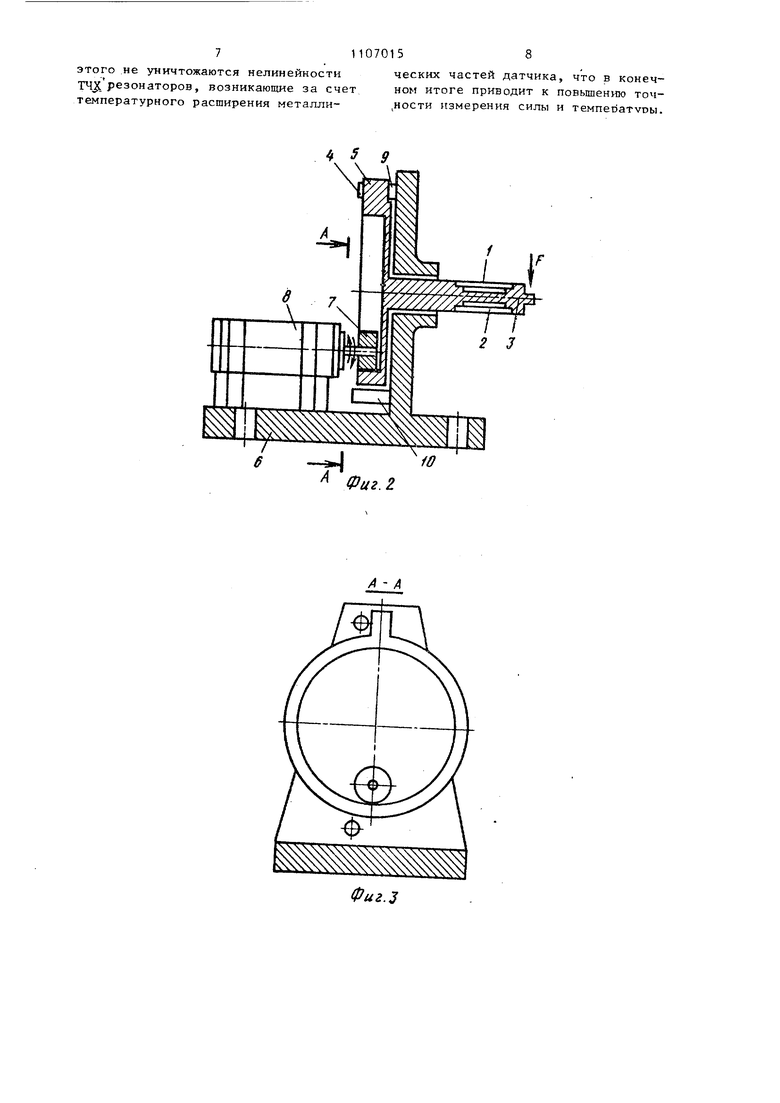
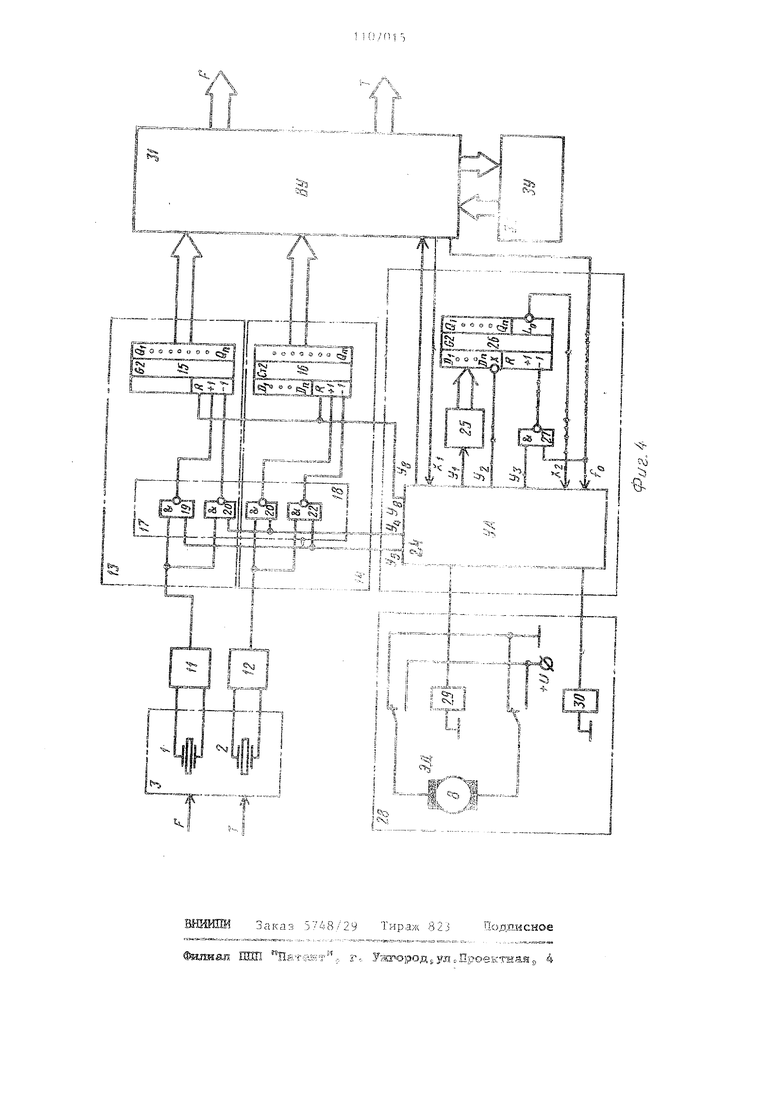
На фиг. 1 изображеь:а. етруктурь.ая схема пьезс резонанснсио датчика; на фиг. 2 - конструкция датчика; на фиг. 3 - разрез Л-Л на ф-ir. 2; на фиг, 4 - | Ункгл1о: :ал1,ная схема датчика.
Пьсзорезона и:ны) датчик силы и температуры содержит пьезокв;5рцевьгх резонатора 1 и 2, укреплснньп ;На упругом 5, заканни; Лю07015J
||;имгн Г1ривод)1ым колесом 6 с высту.ом ., пругий элемент установлеь- в сс;;она: ии 6,К внутре}И1ей стороне дриводн(го KOJseca прижат обрезиненный ч ро.чик /, связанньд с реверсивным
- лел--гродпигатедем 8 возвратно-вращаТРЛ1,-:ого движения упругчпо элемента на 1-f.
Э::ек трс-Дяигатедь и фрикционная О riapa ро.дик - приводное колесо с бразуют привод возвратно-вращательного д.вижения. К дрхгпму кошху упругого элемента приложена измеряемая си::а действующая перпендикулярно плоскости резонаторов. В основании имеются дгка фиксатора 9 и 10 крайних положеН.Й ynpvroro о.чемента.
1 ьезорезо1 аторы вклзочены в схемы ач то г с-н ораторов Н и 12 соответст1 С1;;о. Выход, автогенераторов иг);-кл 1че-Ь.| к нреобразоватслям ь:;и-1-отз код 1J и 14 J состоящих из р(Ли-;)С:нН г счетчиков 1; и 16 и .лмт.; ГО 17 и 18, выполненных а лсиилеских э.:ементах И-НЕ 19-22. ри4i M сигналы с вь1хода каж/ioro из азтотенсраторов поступаьпт на соотпетсгвую1цие суммируюии е i; В)1читаю 1;и (,; реверсивных счетчиков через cooTBi:-TCTBy oiJ e коммутаторы, а 1 ь:;;од рсгир.л.ганьк счетчиков является одноИттемслпю выходом преобразователя fficTo-ra - код, Уггравдяющие входьл комN-jyTa торов и входы установки нуля реверсивных счетчиков подключен)1 к ус |-ройству 23 управления, состоящему из управляюи1его автомата 24, соединс;НН(зго с блоком 25 памяти, счптчпком 26 и коммутатором 27. Выходы б л еж а соединены с установленными Г5ходами счетчика, а выход коммутатора - с его вычитающим в.ходом. Кро.ме того, устройство управ.чения соединено с приводом 28 возвратно-вращателы.шго движения, содержащего дпг. реле 29 и 30, соединенных с унр,:.-1ля;о11;им автоматом, и реверсивный дЕИ -;ггель, питание которого коммутируетс;я контактами упомянутых реле,
Вь:ходы преобразователей частота код пс1дк;тючены к вычислительному блоку 31, с оеди1;енному с блоком 32 памяти и устройством управления.
Устройство работает следующим образсм,
В нсхо.дном положении (фиг. 2) воздействующие на упругий элемент 3
с укрепленными на нем резонаторами 1 и 2 параметры сила F и температура
i приводят к изменению частот автогенераторов 1 1 и 1 2
f| .f.o + а„ (т-т,) - a,(F-F,),(1) г 70+ а.ЛТ-Т„) a.CF-F), (2)
где а , - коэффициенты преобразования по температуре; л коэффициенты преобразования по силе; TQ, FP - координаты реперных точек по температуре и силе;
хо начальные частоты автогенераторов, в..
В положении, показанном на фиг.2, действующая сила F создает такой момент в консольно-закрепленном чувствительном элементе 3, что верхний резонатор 1 испытывает деформацию растяжения, а нижний 2 - сжатия. Поэтому коэффициенты силовой чувствительности в уравнениях (1) и (2) взяты с противоположньми знаками, причем знак - соответствует деформации растяжения.
Коэффициенты силовой и температурной чувствительности зависят от текущих значений F и Т.
(3)
at, СиКл, (F - FO) ; (4) CH-Kiid - То) ,
а1г
где К, - силовой коэффициент термочувствительности;т К - температурный коэффициент
тензочувствительности;
а°. , ау, - коэффициенты сило- и термочувствительности в репеной точке;
,2 - номер пьезорезонатора. Подставив выражения (3) и (4)
в (1) и (2), приняв Fg и TO равными
нулю и раскрыв скобки, получаем
ff f,, +а°, Т - а- F - (а; Kf, +
(5)
+ а°, KJ )Р.Т
f ,дв тц-я F+ С я 11 о f 1
(6)
КТ 1F т - 1.
Если с помощью привода возвратно-вращательного движения 28 развернуть упругий элемент 3 на 180 вокруг оси,перпендикулярной приложенной силе F так, чтобы резонатор 2 оказался вверху, а резонатор 1 снизу, то частоты на выходах автогенераторов 11 и 12 изменятся и будут соответственно равны
f-- f,. + а;; Т + а;;„ F + (а;; К + )-рТ;-(7)
f,
а, Т -. а, F - (а, К,
2i5 (8)
)F. Т,
где, Т и F - те же текурдие значения параметров, что и в уравнениях (5) и (6). В таком положении резонатор 2 испытывает деформадию растяжения, а резонатор 1 - сжат;;я, поэтому соответственно изменились знакипри коэффициентах.
Вычитая из уравнения (7) уравнение (5), а из уравнения (6) уравнение (8), получаем
.+
fV- fr + 2(а к, + + а К )TF,(9)
)
- 2а°2Р + 2(а°, К.Г,
+ K)TF
(10)
Уравнения (9) и (10) линейны относительно силы F и произведения силы и температуры TF. Их можно решить относительно этих величин, а затем вычислять температуру и силу.
Фиг. 3 иллюстрирует практическую реализацию алгоритма получения урав5 нений (9) и (10).
Последовательность работы устройства задается управляющим автоматом (УА) 24.
Устройство запускается сигналом X , - Пуск от вычислительного блока 31. До поступления сигнала х,
I УА находится в состоянии ожидания,
чувствительный элемент 3 с пьезорезонаторами 1 и 2 находятся в исход ном положении (фиг.2). На выходе автогенераторов 11 и 12 действуют информационные частоты f и f.
При поступлении сигнала Пуск на 0первом шаге УА обнуляет реверсивные счетчики 15 и 16, сформировав сигнал q , и подготавливает формирователь временных интервалов, состоящий из блока 25 памяти и счетчика 26, произг водя запись константы п„ из блока памяти в счетчик. Константа п, задает длительность временного интервала Т, в течение которого на соответствующие ВХОД1.1 реверсивных счетчиков 15 и 16 будут постуг-ать информационные частоты fГи f В то же время УА начинает формировать сигнал Чр J запрепаюшнй обрлщение к устройству во время измерения.
На следующем шаге УА формирует
о т к рыв а ющи н ключ 2 7
сигнал
vs
частота опорного генератора из вычислительного блока 31 поступает на вычитающий счетчика 26 /ю тех пор, пока содержимое счетчика не станет равным нулю. В этот момент формируется сигнал х,. прекращаюпшй формирование временного интервала Ti. Одновременно, в течение интервала Т л , УА форг-)ирует сигнал L| , открывающий ключи 20 и 21 коммутаторов 17 н 18 и частота поступает на вычитаюпщй вход ренерсивного счетчика 15, а f.; - на суммирутосций вход pesepcpiBHoro счетчика 16. Б результате к концу интервала Tj в счетчиках соответственно будут записаны числа
(+1
N
1)
-s-l
«20 Т, ff
Затем УА подготавливает формирователь временных интервалов к формированию интервала То, переписывая константу П2 из блока 25 памяти в счетчик 26.
На следующем шаге формируется временной интервал Т аналогично тому.
В текак формировался интервал
УА формирует сигчение интервала
нал ц , от которого срабатывает реле 29 и подает напряжение питания соответствующей полярности на реверсивньиЧ двигатель 8 привода 28 возвратно-вращательного движения.
Реверсивный двигатель разворачивает чувствительный элемент 3 с укрепленными на нем пьезорезонато -рами 1 и 2 на 180 вокруг оси перпендикулярной приложенной силе -fтак, чтобы резонатор 2 оказался сверху а резонатор 1 - снизу. В результате изменяются частоты на выходах автогенераторов 11 и 12 соответственно f,- и f.
9
Затем УА вновь формирует интервал Т,
только теперь
течение
интервала формируется сигнал цу, который открывает ключи 19 и 22 коммутаторов 17 и 18. Частота поступает на суммир тощий вход реверсивного счетчика 15, а частота
г j - j-:a шачитающии вход реверсияноге- сче7чикл 16, В результате к кониу формирования интервала в счетчиках 15 и 16 будут с0(1тпетстве1-но записаны коды
f + I ,
N, Т, (ff
- f, );
N5 - fz
Затем УА
тсчергке интервала формирует СИ Ц|,, от действия которого срабать /. реле 30, по
дающее соответствующук-:- о-олярность н
1пряжения питания на реверсивный
: вигатель 8 привода 28 возвратно-ир
э1дятг-льн(1Го дниж.ения5 который воз
|фагцает упругий элемент 3 с укрепле
ча Н(;м резонат-орами 1 и 2 в исхо
:;ное голокение фиг. 2),
По окончании интервала Т2 пре
ращается -также формирование сигнал , отсутствие которого яЕзляется кало. для вычислительного блока о том, что продесс измерения зак чей. УА 24 переходит в состояние Дания.
Вычкслительный блок 31 считыьпет КЗ реверсивных счетчиков 15 и 16 коды N. и Мл. решает систему ypariяения (9) (10) относительно пара :етров F fi FT, а затем определяе тэкпературу Т и силу F.
В результате взаи-мно -о уничтожения гьлчальных частот автогенератгро снижается относите. погрешног гь измерения и отпадает необходимое -j в периодической аттестадии и калибровке нуля датчика. В результате учета взагечиого влияния коэф-фидие :тов сило- - и тензочувствитедьности друг на друга повышена точность и:;;мерения, В итоге уходы указанных к тэффгщие1- тов зависят только от старения резокаторон.
Кроме того, достоинством предлагаемого ус-гройства является то, в -результате вычитания фактически Бзаимко-уикчтожается зависимость частоты пьезорезонаторов от температуры j поэтому не играет роли - линейна она и.;и кет. Это дает возможность использовать резонаторы не только LC-среза, но и других, с нелинейньй П 1-емпературно-частотны1-:и характеристиками, ijanpHwep, АТ-среза, и Б то же время значительно снижает технологические требования к используемым резонаторам. В силу
711070158
этого не уничтожаются нелинейности ческих частей датчика, что в конечТЧДрезонаторов, возникающие за счет ном итоге приводит к повышению точтемпературного расширения металли- ,ности измерения силы и темпеоатуоы.
-т1
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Малов В.В | |||
| Пьезорезонансные датчики | |||
| М., Энергия, 1978, с | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пьезоэлектрический преобразователь | 1979 |
|
SU777482A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
