Соединен с выходом элемента задерж ки, а входы компаратора соединены вторыми входами блока управления памятью. 3. Устройство по п. 1, о т л ичающееся тем, что блок согласования содержит три элемента И-НЕ и два ОК-триггера, первый вход блока согласования соединен с С-входом первого ЛК-триггера, через первый элемент И-НЕ - с С-входом второго JK-триггера и через второй элемент И-НЕ - с выхо дом данного блока, второй вход 1 блока согласования соединен с S-входами ЗК-триггеров, прямые входы которых подключены к первым выходам блока согласования, шнверсный выход первого JK-триггера соединен с одним из первых выходов блока согласования и через третий элемент И-НЕ - с одним первым выходом данного блока, прямой выход первого ОКтриггера подключен к второму входу первого элемента И-НЕ, а первые входы первого и второго jK-триггеров подключены к шине положительного потенциала.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения момента касания режущего инструмента с обрабатываемой деталью | 1983 |
|
SU1148769A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1990 |
|
RU2029688C1 |
| Коммутирующее устройство | 1986 |
|
SU1401592A1 |
| Устройство для моделирования вентильных преобразователей | 1983 |
|
SU1137491A1 |
| Устройство для возбуждения синхронной электрической машины | 1985 |
|
SU1387152A1 |
| Статический компенсатор реактивной мощности | 1982 |
|
SU1073841A2 |
| Устройство для автоматической настройки компенсации | 1987 |
|
SU1520626A1 |
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| Устройство для возбуждения синхронного электродвигателя | 1985 |
|
SU1288873A1 |
| Тиристорная система зажигания | 1989 |
|
SU1710816A1 |


1
Изобретение относится к машиностроению и предназначено для использования на металлорежущих станках в качестве устройства для определения момента касания режущего инстру- 5 мента с обрабатываемой деталью.
Известно устройство для определения момента касания инструмента с деталью, содержащее генератор механических колебаний, вибродатчик, tO усилитель и командоаппарат. Генератор возбуждает механические колебания в плоскости, перпендикулярной к плоскости обработки с частотой, лежащей вне спектра частот колеба- 15 НИИ станка. Вибродатчик фиксирует колебания в плоскости, параллельной плоскости обработки, возникающие в момент касания шлифовального круга с деталью 1 .20
Недостатками этого устройства являются значительная мощность генератора механических колебаний для тяжелых металлорежущих станков а также сложность конструктивного ис- 25 полнения и размещения, наладки и обслуживания генератора механических колебаний и вибоодатчика.
Наиболее близким к предлагаемому вляется устройство для измерения 30 гла сдвига между током и напряжеием в частотно-управляемых электрориводах, содержащее блоки формироания временного интервала, соответтвующезо иолупериоду напряжения 35
ячрйку формирования
инвертор;)
временного интервала дЪ , соответствующего углу сдвига фаз между током и напряжением инвертора интеграторы формирующие пилообразное напряжение, пропорциональное Т/2 и i ключи, ячейки памяти и схемы управления ими, ячейки согласования, делитель и сумматор 12.
В момент касания режущего инструмента с обрабатываемой деталью происходит изменение угла сдвига фаз между током и напряжением, по которому определяют момент касания. : Однак9 использование известного устройства в области мащиностроения на металлорежущих станках с частотно-управляемым электроприЛдом главного движения невозможно, так как оно работоспособно лишь при форме тока двигателя, близкой к синусоидальной, когда ток один раз
за период изменяет свой знак.
Экспериментальные исследования
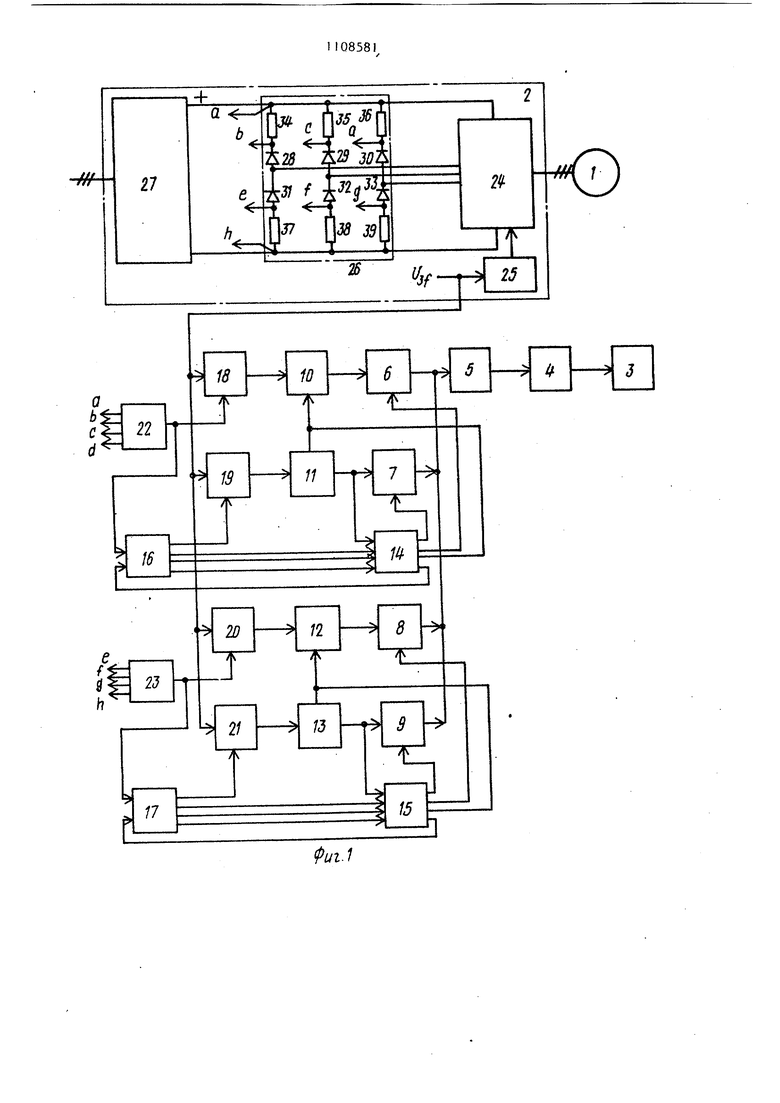
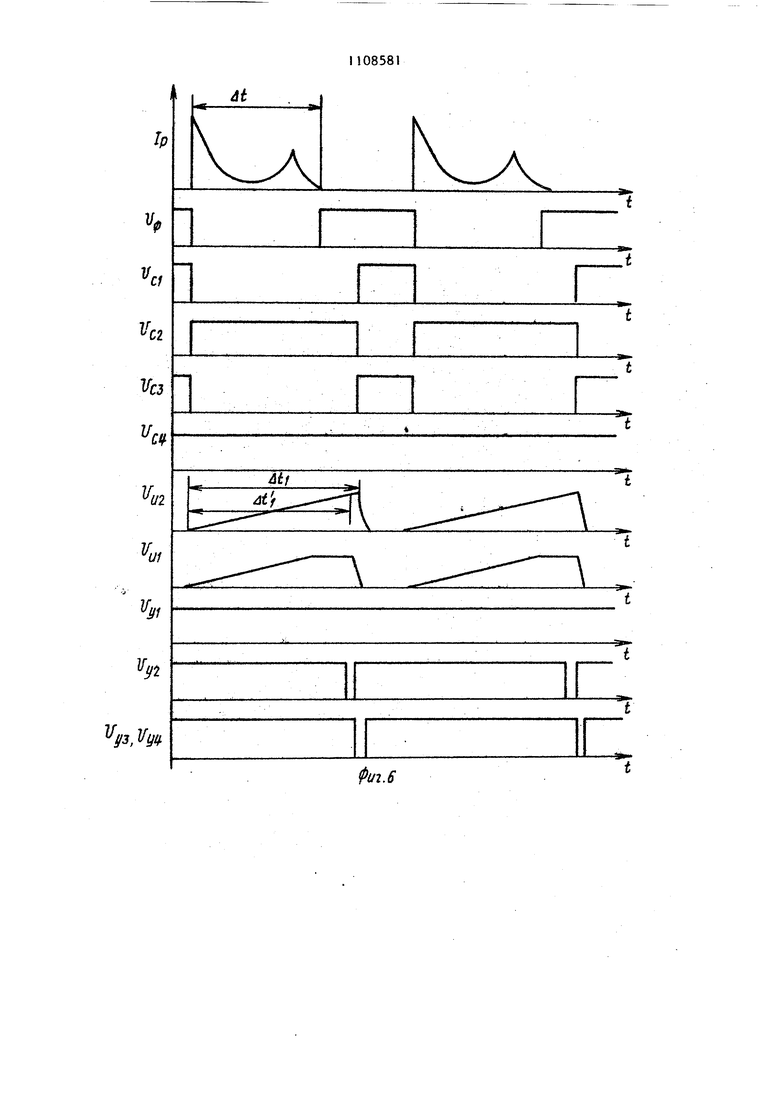
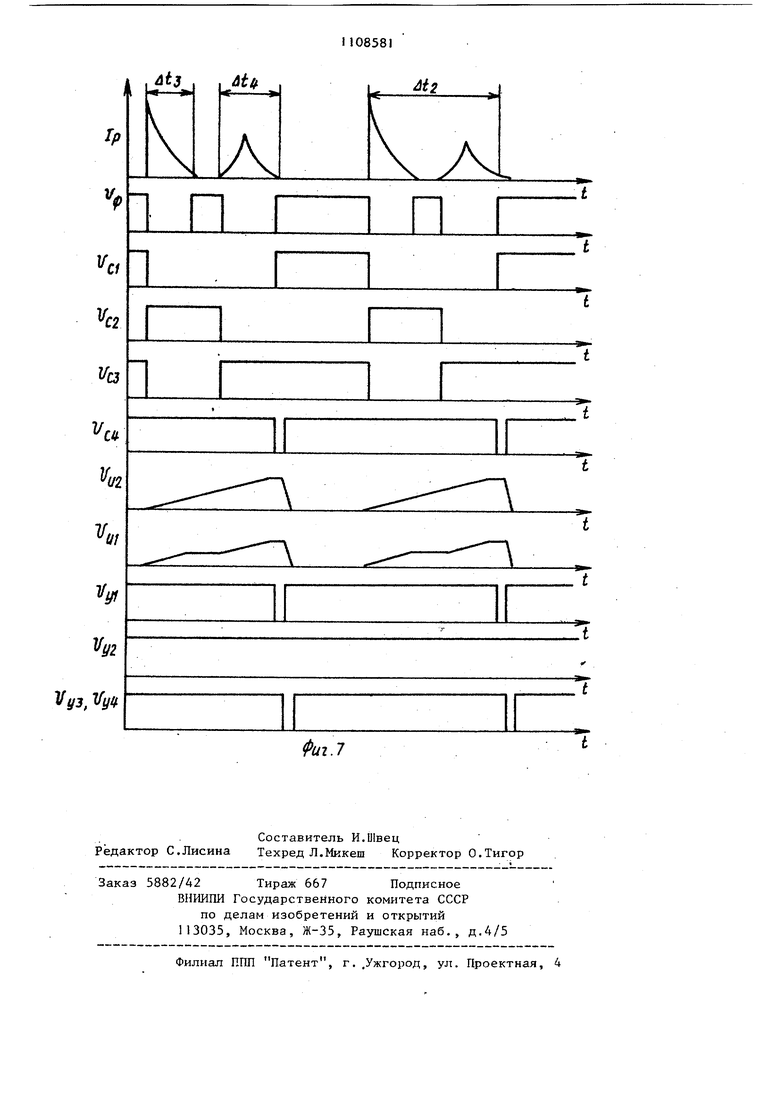
тока асинхронного двигателя 4А180М4УЗ( кВт; об/мин) при питании от тиристорного преобразователя частоты ЭКТ63/380У4 показывают, что такую форму ток двигателя имеет в двух режимах работы частотно-управляемого электроривода; при нагрузке холостого хода Р.у и нагрузке ,4 Рц , где; РН номинальная мощность двигате-ия. В диапазоне нагрузки P-t(), IJ ток двигателя AD,,ju,i меняет c.HtMt нак за время A-t, г(К)тнет :тпун)|ц(.( 3П углу сдвига фаз между током и напря жением, и устройство теряет свою работоспособность. При использовании устройства в системе регулирования угла сдвига фаз р между током и напряжением (для чего оно и предназначено) , угол tp поддерживают на постоянном уровне, равном номинальному значени и кривая тока двигателя имеет форму при которой обеспечивается работоспособность устройства. Диапазон .изменения нагрузки ,4 Pj . в котором устройство неработоспособно наиболее характерен для работы двигателя главного движения металло режущих станков перед врезанием в деталь(в частности для шлифовальных станков ,2 Pfj). Следовательно, устройство требует усовершенствоваНИН для применения его в области машиностроения. Усовершенствование устройства обеспечение его работоспособности в любых режимах позволя ет применить его не только в област электротехники, но и в области маши ностроения, т.е. расширить область применения устройства. Теоретические и экспериментальны исследования тока асинхронного двигателя при питании от инвертора напряжения показывают, что при незначительной нагрузке которая наибо лее характерна для работы двигателя главного движения металлорежущих станков на холостом ходу перед моме том касания кривая тока двигателя в течение времени л. меняет дважды свой знак. Формирователь временного интервала A.t формирует за время , соо ветствующее углу фаз между током и напряжением, два разных по ширине импульса. Устройство в таком режиме теряет свою работоспособность и не может служить датчиком момента каса ния режушего инструмента с обрабаты ваемой деталью. Цель изобретения - расширение области применения устройства для определения момента касания режущего инструмента с обрабатываемой деталью Указанная цель достигается тем, что в устройстве для определения момента касания режущего инструмента с обрабатываемой деталью, содержащем тиристорный преобразователь частоты блок памяти через дифференциатор соеди {ен с исполнительным механизмом, и дна кан;1Л.ч, каэддый ич ксггс рых содержит формирователь, импульсов, блок согласования и блок управления памятью, соединенный первым выходом с первыми входами первого и второго интеграторов, в каждый канал вве дены четыре ключа, блок формирования импульсов выходом соединен с первым входом блока согласования и через первый ключ - с вторым входом первого интегратора, выход которого через второй ключ подключен к входу первого блока памяти, первый и четвертый выходы блока согласования подключены к первому, третьему и четвертому входам блока управления памятью соответственно, второй выход через третий ключ - к второму входу второго интегратора, выход которого соединен с вторым входом блока управления памятью и через четвертый ключ - с входом второго блока памяти, второй выход блока управления памятью подключен к второму входу четвертого ключа, третий выход - к второму входу второго ключа, а четвертый выход - к второму входу блока согласования, первый выход тиристорного преобразователя частоты соединен с вторыми входами первого и третьего ключей, а входы формирователя прямоугольных импульсов соединены с соответствующими вторыми выходами тиристорного преобразователя частоты. Кроме того, блок управления памятью содержит элемент задержки, пять элементов И-НЕ и последовательно соединенные компаратор, первый и второй формирователи импульсов, выход второго формирователя импульсов соединен с первым выходом блока управления памятью и через первый и второй элементы И-НЕ - с вторым выходом данного блока, выход первого формирователя импульсов подключен через третий элемент И-НЕ к первому входу четвертого и пятого элементов И-НЕ, выходы которых соединены с третьим и вторым выходами блока управления памятью соответственно, вторые входы четвертого и пятого элементов И-НЕ подк;ги1чены к первым входам блока управления памятью, второй вход первого элемента И-НЕ соединен с выходом элемента задержки, а входы компаратора соединены с вторыми входами О. управления памятью. Блок согласования содержит три элемента И-НЕ и два DK-триггера, первый вход блока согласования соединен с С-входом первого jK-три гера, через первый элемент И-НЕ - с С-входом второго JK-триггера и через второй элемент И-НЕ - с выходо данного блока, второй ьу.од блока согласования соединен с 5 -входами JK-триггеров, прямые входы которых подключены к первым выходам блока, согласования инверсный выход первого JK-триггера соединен с одним из первых выходов блока согласования и через третий элемент И-ПЕ - с одним первым выходом данного блока, прямо выход первого JК-триггера подключе к второму входу первого элемента И-НК, а первые входы первого и втор го К-триггеров подключены к шине положительно1о потенциала. На фиг. 1 представлена функциональная схема предлагаемого устройс вЙ для определения момента касания режущего инструмента с обрабатываюа;ей деталью; на фиг. 2 - функциональ ная схема первого формирователя импульсов; на фиг. 3 - функциональная схема второго формирователя импульсо на фиг. 4 - функциональная схема блока согласования; на фиг. 5 функциональная схема блока управлени памятью; на фиг. 6 - диаграмма сосг тояния элементов устройства в первом режиме работы; на фиг. 7 - диаграмма состояния элементов устройства во втором режиме работы. На фиг. 6 и 7 введены следующие обозначения: реактивный ток Зр в цепях диодов анодной группы (или .катодной группы юста 26 возвратног тока; напряжение OCR на выходе первого или второго формирователей импульсов; напряжение 14: на первом вьсходе первого (ИЛИ второго)блока согласования; напряжение V на второ выходе первогоСили второго)блока согласования; напряжение YC на трет ем выходе первого(лли второго блока согласования; напряжение , на четвертом выходе первого(или второго блока согласования; напряжение Уцл на выходе nepBoio (или третьего) интег ратора; напряжение U44 }:п выходе второго{ или четворго1о)иито1ратора; напряжение Ои, )i,-i riepBOM ныходе порно го(и.т1и пторпго О.чока у1:равления плмятыо и сия:;;1Ч К)м с мим управляющем нход1 in .П1 четвертого) 816 ключа; напряжение Uy, на втором выходе первого(или второго)блока управления/ памятью и связанном с ним управляющем входе первого или третьего ключа); напряжение третьем выходе первого (или второгоi блока управления памятью и связанными с ним входах обнуления первого, второгоСили третьего, четвертого)интеграторов; напряжение Uu, на четвертом вькоде первого или второго блока управления памятью и связанном с ним втором входе первого (или второго)блока согласования. Устройство для определения момента касания режущего инструмента с обрабатываемой деталью содержит асинхронный электродвигатель I привода главного станка, подключенный к тиристорному преобразователю 2 частоты, исполнительный механизм 3, подключенный к выходу дифференциатора 4, вход которого подключен к выходу блока 5 памяти, вход которого подключен к выходам ключей 6 и 9, интеграторы 10 - 13, управляющие входы ключей подключены к выходам блоков 14 и 15 управления памятью соответственно, блоки 16 и 17 согласования, ключи 18 - 21, блоки 22 и 23 формирования прямоугольных импульсов. Тиристорный преобразователь 2 частоты содержит автономный инвертор 24 напряжения, блок 25 управления инвертором, мост 26 возвратного тока и источник 27 напряжения. Мост 26 возвратного тока выполнен на диодах 28 - 30(анодная группе); (катодная группа)и резисторах 34 39. Блок 22 формирования прямоугольных импульсов (фиг. 2)содержит диоды 40 - 42, катоды объединены в общую точку, которая подключена к аноду светодиода оптопары 43, катод которого является входом блока 22 формирования. Выход оптопары подключен к входу нуль-органа 44,выход которого подключен к катоду стабилитрона 45 и является выходом блока 22 формирования. Анод стабилитрона 45 подключен к нулевой шине источника питания. Блок 23 формирования прямоугольных импульсов сОиг . JJco/Hp nc диоды 46 - 48. АНОД1.1 оС1 сдинены в общую точку, KOlOp;iH ПОХ1КЛК)Ч(М1;1 к к,полу снекчдиода огпоп.чры 4., .nro.i ко пгрого является входом блока 23 форми рования. Выход оптопары подключен к входу нуль-органа 50, выход которого подключен к катоду стабилитрона 51, Анод стабилитрона 51 подключ к нулевой шине источника питания. Каждый блок 16vl71 согласования Сфиг. 4)состоит из Зк-триггеров 52 53 и элементов 54 - 56 И-НЕ. Блок .4 (1 51 управления памяти (фиг. 5)состоит из компаратора 57, первого формирователя 58 импульсов, элемента 59 И-НЕ, второго формирователя 60, импульсов, элементов 61-63 И-НЕ,элемента 64 задержки, элемента 65 И-НЕ. Работа устройства рассматриваетс в двух режимах. Первый режим. Кривая тока двигателя в течение времени At , соответ ствующего углу сдвига между током и напряжением, не меняет свой знак что определяется режимом холостого хода двигателя. Второй режим. Кривая тока двигателя в течение времени At дважды меняет свой знак. Устройство в первом режиме работ ет следующим образом. При движении инструмента к обрабатываемой детали асинхроиньй двига тель 1 привода главного движения станка работает в режиме холостогЪ хода. При st-OM в цепях диодов 28 30 анодной группы и 31 - 33 катодной группы моста 26 возвратного тока тиристорного преобразователя 2 частоты поочередно через Т/3 протекают однопо.чярные импульсы реактивного тока JP (фиг. 6). Импульсы тока Ор в цепях диодов 28 - 30 анод ной 1руппы сдвинуты по отношению к импульсам в цепях диодов катодной группы 31 - 33 на Т/6. Время протекания л каждого импульса реактивного тока JP, по диодам моста возвратного тока однозначно определяется углом сднига ф между током и напряж нием дилгате.чя I . Угол (р можно О1:редели. Сй-ойдтЬ О) -2згГ, где 63 - Idrf - у г.поная частота напряж ния инвертора; f - частотп няпряжепия ин ш ргора. Во время отсутствия импульса реактивного тока СЗп состояние элементов устройства полностью определяется точкой начала координат диаграммы состояния элементов устройства(фиг. 6), При протекании по одному из резисторов 34 - 39 реактивного тока Jp на выходе первого 22(или второго 23) блоков формирования и связанных с ними управляющем входе пятого 18 (или седьмого 20)ключа и первом входе первого 16(или второго 17) блоков согласования появляется логический 0(иу. В результате отрицательного перепада потенциала на первом входе, на первом выходе первого I6(или второго 171 блоков согласования появляется логический О , на втором выходе - логическая ) третьем выходе - логический 0(и°(, состояние четвертого выхода не меняется {U(,V Ключи 18 и 19 {или 20 и 2Поткрываются, п результате чего интеграторы 10 и I1(или 12 и 13)подключаются к напряжению задания Ugfчастоты тиристорного преобразователя 2 частоты. Начинается интегрирование напряжения Ujf , Сигнал на выходе интеграторов 10 (.или и, , i1 (ИЛИ 131- . 1 А-Ь Jur йс J U;,-Pcfi, -f где I , С - сопротивление и емкость цеши интеграторов; &t;, - время интегрирования интегратора 1Iiили 3, Задающий генератор блока 25 управления инвертором имеет линейную характеристику, т.е. U,f W где К - коэффициент пропорциональности между частотой и напряжением задания частоты. При работе двигателя I на определенной частоте вращения постоянно. При изменении частоты Г в переходных режимах приращение частоты f за время интегрирования ut мало, что позволяет считать с достаточной степенью точности ОЗУ за время интегрирования постоянным. Тогда С2) можно записать 2.ЖС 9При выборе таких значений и и чтобы их произведение равнялось К/27 уравнение 4 принимает вид СопостапиЕ О) и (3 , можно записать , т.е. максимальное на пряжение интегратора 10(или 12; за период интёгрированияг д-Ь определя ется углом ф . По истечении времен д-Ь , на выходе первого 22 (или вто рого 23)блоков формирования и связ ных с ним управлякщем входе 18 (или 20)ключа и первом входе перво 16 (или второго 17)блоков согасован появляется логическая (Jq)- Б результате этого ключ 18(или 20) закрывается и интегратор 10(,или 12 отключается от напряжения ( Напряжение на выходе интегратора 10 (или 1 2) . соответствует действительному значению ф . Положительны перепад потенциала на первом входе не приводит к изменению состояния первого выхода первого 16 (или втор го 17 блоков согласования, где остается логический 0(Uc/i) интегра тор 1 1 (,лли 13) продолжает интегрировать напряжение U3f Когда напря жение Уц на выходе интегратора 11 (или 13) и спязанном с ним первом входе первого 14 (или второго 15) блоков памяти превышает напряжение Uc/; на четвертом входе первого 14 Сили второго 15)блоков управления памятью происходит изменение состо ния элементов устройства. Напряжение определяется состоянием четвертого выхода первого 16 (или второго 17 блокг) согласования (в данном случае там присутствует логическая 1)и выбирается таким образом, чтобы в соответствии с (6) УСЛ 85° Это объясняется тем, что в режиме холостого хода угол сдвига между током и напряжением двигателя не превьшшет 85°. Следовательно, если в течение времени , , соответствующем ф 85, в кривой реактивного тока р не появляется второй импульс, его появление в дальнейшем исключено и может быть дана команда на перевод информации о действитель ном э-начении из интегратора 10 (.чли 12) в блок 5 памяти. Блок памят может быпл реализован, например, в В1ще Konaefic.jTopa, Когда U(j становится больше Uci,., на втором выходе (в слум;.1е присупствия на втором вхо логической I, что в данном случае 81 соблюдается)первого второго 15)блоков управления памятью кратковременно появляется логический О lUQ, поступающий с второго выхода ,на управляющий вход ключа 6(или 8). В результате этого ключ 6(или 8.. открывается, интегратор 0(или 12) подключается к блоку 5 памяти и происходит передача информации о значении угла ф с интегратора 10 (или 12) в блок 5 памяти. Время открытого состояния ключа 6(или 8 выбирается достаточным для передачи информации от интегратора 10 (или 12) В блок 5 памяти. Как только на втором выходе первого 14(или второго 15)блока управления памятью устанавливается l(-Uujb ключ 6 (или 8) запирается и интегратор 10(или 12) отключается от блока 5 памяти. В этот момент на выходах первого 14 (или второго 15 блоков управления памятью кратковременно появляется логический O(UI,,ULJ) , поступающий с выхода на вход обнуления интегратора 10 и 1 I (или 12 и 13)|, а также , на вход первого 16(или второго 17) блока согласования. В момент появления логического OtUyJ на входе первого 16 (или второго 1 7) блока согласования состояние его выходов изменяется. На первом выходе и связанном с ним управляющем входе клюЛ 19 (или 2 О появляется ло.гическая l(Ut/(} на втором выходе логический 0( ) третьем выходе - яйгическая 1(ийл) состояние четвертого выхода не меняется ( УсД Появление на управляющем входе ключа 19 (или 20 логической 1 приводит к его закрыванию и отключению интегратора 11(или 13) от напряжения задания Djf . Время присутствия логического О на третьем и четвертом выходах первого 14(или второго 15)блоков управления памятью одинакового и выбирается достаточным для обнуления интеграторов 1 1 (или 1 3)i Послепоявления на третьем и четвертом выходах первого 14 (или второго 15 блоков управления памятью логической 1 цикл одного измерения окончен и схема готов а к следующему измерению. В момент касания режущего инструмента с деталью нагрузка двигателя 1 возрастает, угол ф уменьшается, что приводит к уменьшению напряжения в блоке 5 памяти. Момент уменьщения напряжения блока 11 5 фиксируется дифференциатором 4, на выходе которого появляется импульс, вызывающий срабатывание исполнительного механизма 3 и прекращение движения режущего инструмента. Исполнительный механизм 3 может быть реали зован, например, в виде электропривода подачи режущего инструмента с системой управления. Устройство во втором режиме рабо ет следующим образом. В этом случае в цепях диодов 28 - 30 анодной группы и 31 - 33 катодной группы моста 26 возврата тока тиристорного преобразователя 2 частоты поочередно через Т/3 протекают по два однополярных импульса реактивного тока 0р. Во время между парами импульсов реактивного тока Зр состояние элементов схемы полностью определяется точкой Нс1чала координа диаграммы состояния элементов устройства (фиг. 7). Пары импульсов тока Ор в цепях диодов 28 - 30 анодной группы сдвинуты по отношению к парам импульсов в цепях диодов катодной группы 31-33 на Т/6. Время Afc2.oT начала протекания первог из пары импульсов до окончания втор го импульса реактивного тока Зр по диодам моста, возвратного тока одно значно определяется углом сдвига .между током и напряжением двигателя :1. Угол (f (6). При протекании по одному из .резисторов 34 - 39 первого из пары импульсов реактивного тока CJp на ы-Аоде первого 22 (или второго 23) блока формировани. и связанных с ним управ; яющем входе 18(или 20) ключа и 16(или 17Яблока согласоиани появляется логический О ( UcS ) В результате отрицательного перепада потенциала на первом входе, на перв выходе первого 16(или второго 17) блоков согласования появляется логический 0(и), на второ.м выход логическая ( третьем вы) , состоя ходе - логически ; НС меняется ние четвертого выхода Ключи 18 и 19(,или 20 и 21) открываются, в результате чего интегр торы 10 и 11(или 12 и 13)подключают ся к Мапряжелию задания Ui,J . Начин ется интегрирование напряжения (г Сигнал на выходе интеграторов 10 (или 12)-Uu, , 1.1 (или 12) - 81 , Uu.4. где Д-Ц ,Л-Ьч - время протекания первого и второго в паре импульсов реактивного тока Ор соответственно. Аналогично выщеописанному можно показать, что Uy WAtj. и т.е. максимальное напряжение интегратора 11(или период интегрирования Ai: определяется углом if . По истечении времени Atj,, т.е. по истечении первого из пары импульсов реактивного тока Jp, на выходе первого 22{или второго 23)блоков формирования и связанных с ним управляющем входе 18 (или 20) ключа и входе первого 16 (или второго 17)блоков согласования появляется логическая l(Llcp- В результате этого ключ 18 (или 20) закрывается и интегратор 1 О (или 12)отключается от напряжения U-jf . Положительный перепад потенциала на первом входе не приводит к изменению состояния выходов первого 16(или второго 17)блоков согласования, на первом выходе которого присутствует логический О ( Интегратор И(или I3) продолжает интегрировать напряжение Uj . При протекании по одному из резисторов 34 - 39 второго из пары импульсов реактивного тока Jp на выходе первого 22 (или второго 23) блока формирования и связанных с ним управляющем входе 18(или 20 ключа и первом входе первого 16 (или второго 17) блоков согласования присутствует логический 0(«(J ) . В результате отрицательного перепада потенциала на первом входе, на первом выходе первого 16(или второго 17)блока согласования остается логический О ( и), на втором выходе появляется логический 0((j° ) , на третьем выходе появляется логическая 1 /ид,), на четвертом выходе остается логическая 1 (). Ключ 19(или 21)остается открытым, и интегратор 1 1 (или 13) продолжае-г интегрирование напряжения Uif Ключ 18 или 20 вновь открывается, и интегратор 10(или 12 подключается к напряжению УОЛ. По истечении времени Airi , т.е. по истечении второго из пары импуль
сов реактивного тока Лр , на выходе первого 22(или второго 23 блока формирования появляется логическая l(Ucp) Ключ 18(или 20) закрывается и интегратор 10(или 12)отключается от напряжения . В результате появления логической 1 на первом входе, на первом выходе первого
16(или второго 17)блока согласования появляется логическая ,i) которая, поступая на управляющий вход ключа 19{или 21), приводит к его закрыванию и отключению интегратора 1 Кили 13)от напряжения задания
УЗ Напряжение выходе интегратора 13)соответствует действительному значению (р . На выходе первого 16(или второго 1 7) блока согласования остается логический О(Uo2 чэ третьем выходе остаетс логическая 1 / U,i) , на четвертом выходе появляется логический О (). Появление на четвертом выходе логического 0(иач) приводит к тому, что напряжение (Jc на четвертом ёходе первого 14 (или второго 15)блока управления памятью становится равным нулю. В результате этого, напряжение Уцо на выходе интегратора I 1
или 13 и связанном с ним первом входе первого i4 (или второго 15) блока управления памятью превышает напряжение Ul 0. Это приводит к тому, что на первом выходе(в случае присутствия на третьем входе логической 1, что в данном случае соблюдается)первого 14 (или второго 151 блока управления памятью кратковременно появляется логический О (0° ) Г1сзс1уиающий с первого выхода па управл гю1цнй вход ключа 7 (или 9). Ключ 7(или 9)открывается, интегратор 11(или 13)подключается к блоку 5 памяти, и происходит передача информации о значеьгии угла f с интегратора И(или 13)в блок 5 памяти. Как только на первом выходе первого 14 или второго 15)блока управления памятью установится логичкская 1 (uu) , ключ 7(или 9) запирается и интегратор 11(или 13)отключается от блока 5 памяти. В этот момент на третьем и четвертом выходах первого 14 (или второго 15)блока управления
памятью кратковременно появляется
iQ
логический Q((0ui поступающий с третьего выхода на входы обнуления интеграторов 10 и 1 Кили 12 и 13), а с четвертого - на второй вход первой
16(или второй 17)ячейки согласования. Интеграторы 10 и 11(или 12 и 13)обнуляются, на четвертом выходе первого 16(или второго 17)блока согласования восстанавливается логическая 1
( После появления на третьем и четвертом выходах первого 4(или второго 15)блока управления памятью ; ргической I (Uy-, Uu) , цикл одного измерения окончен и схема готова к
следующему измерению (р . В момент касания режущего инструмента с деталью нагрузка двигателя 1 возрастает, угол Р уменьшается, что приводит к уменьшению напряжения в
блоке 5 памяти. Момент уменьшения напряжения в блоке 5 памяти фиксируется дифференциатором 4, на выходе которого появляется импульс, вызывающий срабатывание исполнительного механизма 3 и прекращение движения
режуи;его инструмента.
Использование предлагаемого изобретения позволяет по сравнению с JQ , базовым объектом повысить быстродейст,вие устройства путем уменьшения постоянной времени. В результате умень:Шается вспомогательное .время при обработке изделий на металлорежущих
станках.
a
/) c d
,
-4D
}-о +
IP
V,
ci Vci Vc3
V,
иг
V.
ui
цз, Vytf.
