о
N5 4
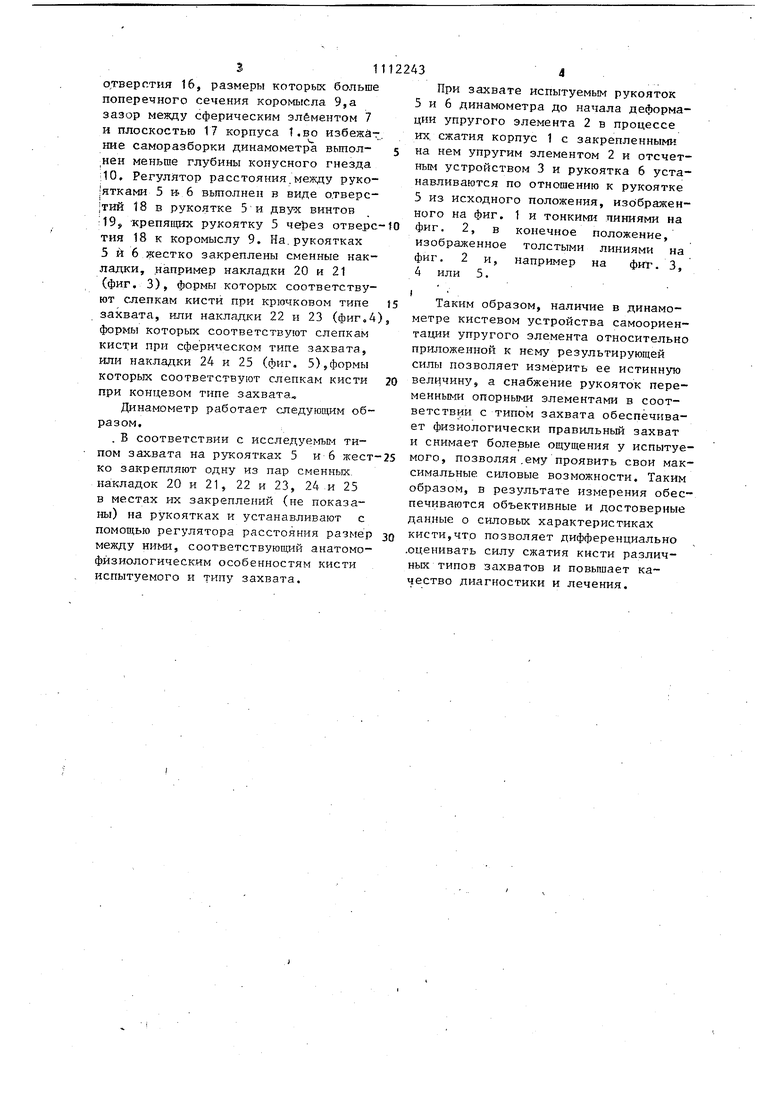
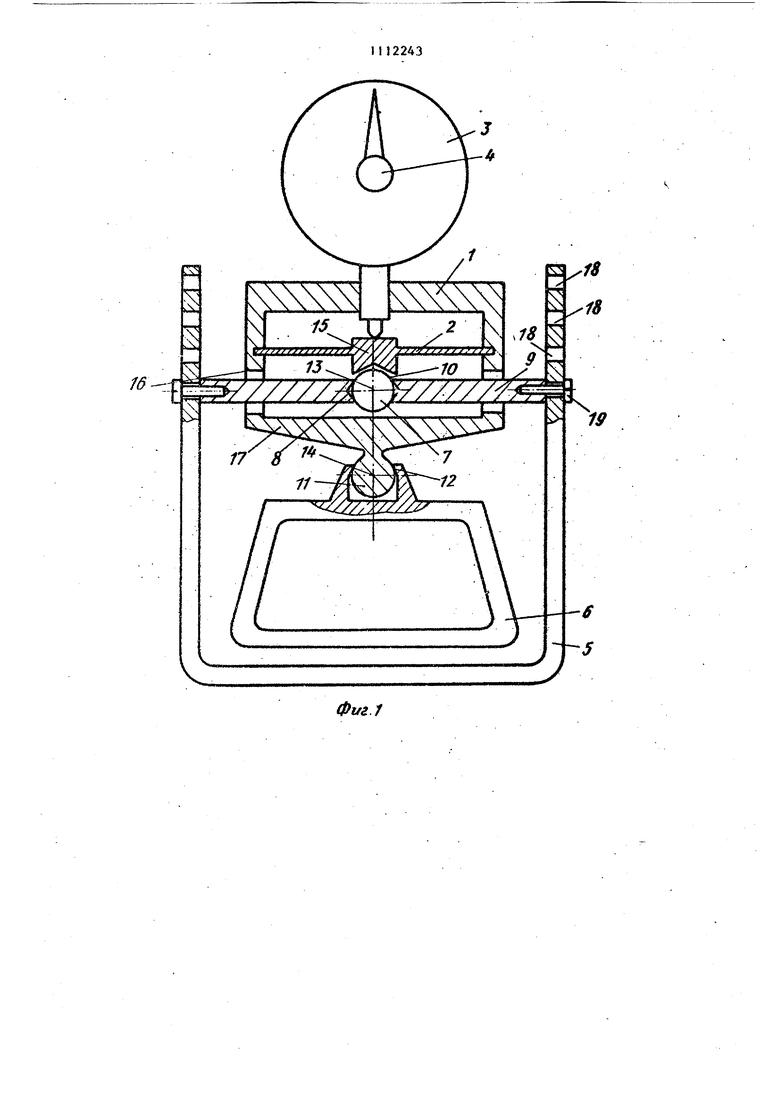
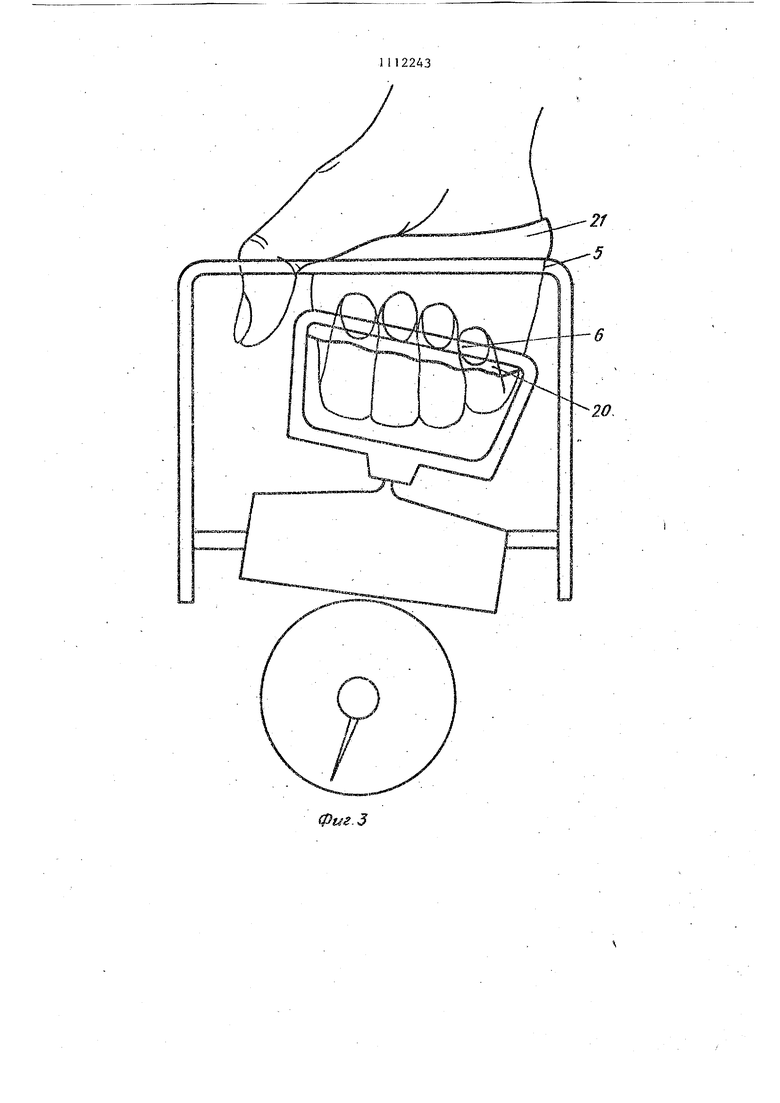
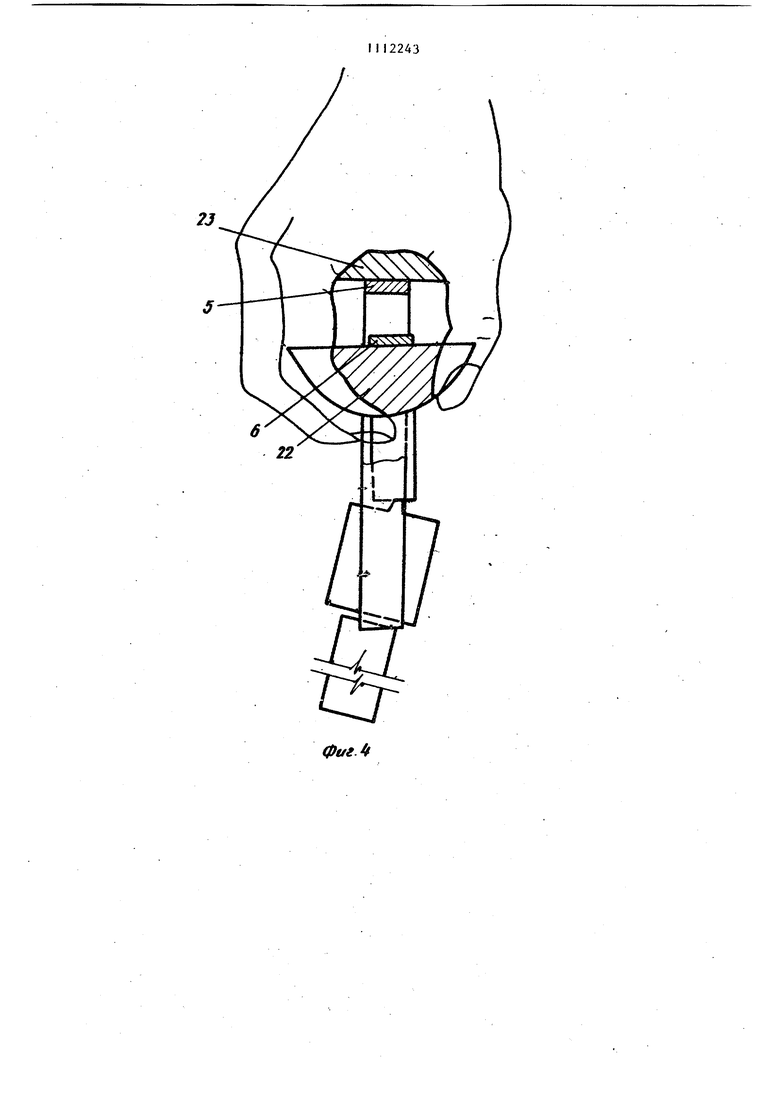
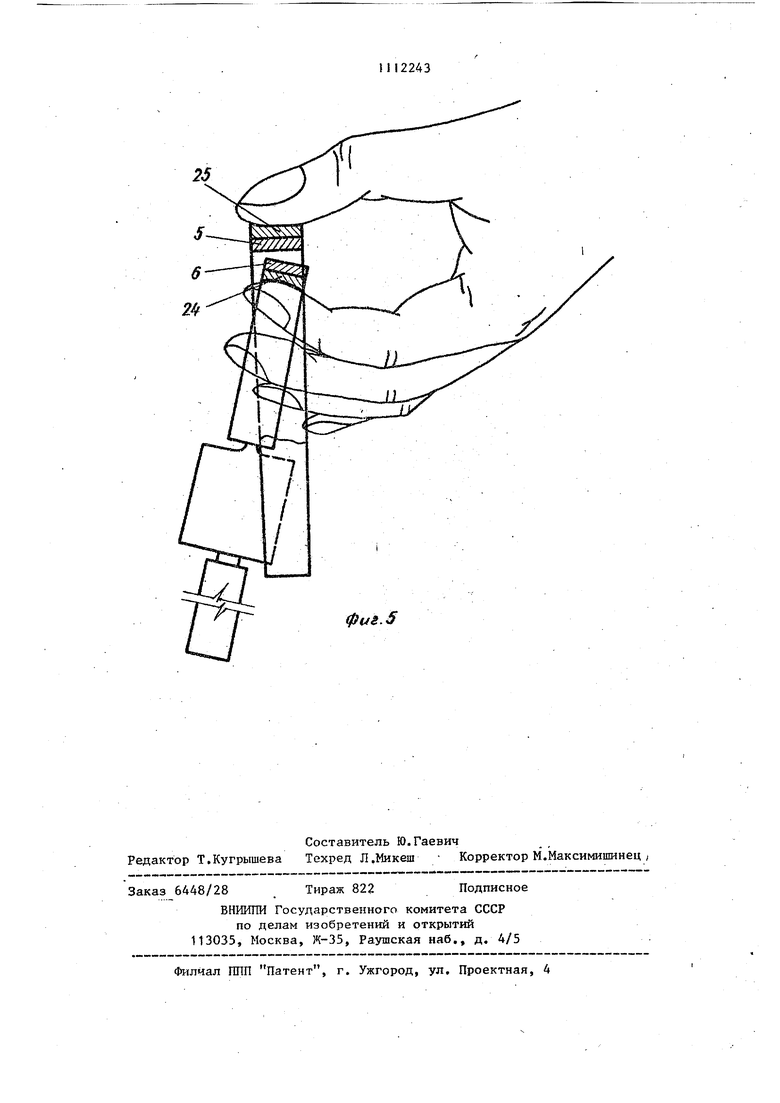
00 Изобретение относится к медицинской технике, а именно к устройствам для определения силовых характеристи руки, и может найти применение в . медицинской и спортивной практике. Известен динамометр модели ДПУ-012МК, являющийся кодификацией серийно выпускаемого динамометра общетехнического назначения Д11У-01-2 по . ГОСТ 13837 ЗИП, содержащий метиллический каркас с жестко закрепленными на нем динамометром ДПУ-01-2 и рукояткой для ладони, рукоятку для пальцев, которая с помощью серег свободно подвешена к динамометру, и регулятор расстояния между рукоятками. При проведении исследования рукоятка для пальцев самоустанавливается под действием результирующей силы мышц, участвующих в захвате, по отношению к рукоятке для ладони, улучшая условия эксперимента til. Недостатком этого устройства явля;ется жесткая связь рукоятки для ладони с упругим элементом динамометра ДПУ-01-2 через каркас, что часто приводит к несовпадению направления результирующей силы с градуировоч №1м направлением приложения силы к упругому элементу и измерению только соетавля ощей результирующей силы. Недостатком устройства также является наличие неизменной формы рукоятки, что приводит при исследовании силовых характеристик различных типов захватов к физиологически неправильному захвату и появлению болевых ощу щений, что не способствует проявлению испытуемым своих максимальных возможностей. Наиболее близким по технической сущности и достигаемому эффекту к изобретению является прибор для изме рения @илы мьш1ц, содержащий две рукоятки с регулятором расстояния между ними и связанный с ними корпус с закрепленными в нем упругими элементами и отсчетн.ым устройством с фиксатором его показаний С 21. Недостатками известного прибора являются жесткая связь упругого элемента с рукояткой для ладони и наличие в корпусе направляющих, ограничивающих подвижность рукоятки для пальцев. Это приводит к тому, что прибор фиксирует только часть резуль тирующей силы мышц. Кроме гтого, выпо нение рукояток определенной формы и размеров при определении силовых характеристик кисти при различных типах захватов не обеспечивает физиологически правильный захват, что не позволяет испытуемому произвести захват с максимальной силой. Целью изобретения является определение достоверных и объективных силовых характеристик кисти при различных типах захватов. Поставленная цель достигается тем, что динамометр кистевой, содержащий две рукоятки с регулятором расстояния между ними и связанный с ними корпус с закрепленными в нем упругим элементом и отсчетным устройством с фиксатором его показаний, снабжен устройством самоориентации упругого элемента в направлении результирующей силы, выполненным в виде двух шарниров, один из которых расположен между конусным гнездом в теле упругого элемента и первой рукояткой, а другой - между корпусом и второй рукояткой, причем центры шарниров и ось конусного гнезда расположены на одной прямой. На фиг. 1 представлена конструктивная схема динамометра} на фиг.2 схема работы устройства самоориента|ЦИи упругого элементаJ на фиг. 3 пример исследования крючкового типа зах.вата1 на фиг. 4 - пример исследования сферического типа захвата на фиг. 5 - пример исследования концевого типа захвата. Динамометр кистевой содержит корпус 1 с жестко закрепленными в нем упругим элементом 2 и отсчетным устройством 3 с фиксатором 4 его показаний, первую рукоятку 5 и вторую рукоятку 6. Динамометр снабжен устройством самоориентации упругого элемента, вьшолненным в виде одного шарового щарнира, состоящего из сферического элемента 7, установленного в конусном отверстии 8 коромысла 9 и конусом гнезде 10 в теле упругого-эл мента 2, другого щарового шарнира, состоящего также из сферического элемента 11, закрепленного на корпусе 1 , и конусного гнезда 12, выполненного в рукоятке 6, причем центры 13 и 14 соответственно сферических элементов 7 и 11 и ось 15 конусного гнезда 10 расположены на одной линииj совпадающей с градуировочным направлением приложения силы к упругому элементу 2. В корпусе 1 быполнены 31 отверстия 16, размеры которь Х больше поперечного сечения коромысла 9,а зазор между сферическим элементом 7 и плоскостью 17 корпуса 1.во избежание саморазборки динамометра вьшол нен меньше глубины конусного гнезда ;10. Регулятор расстояния.между руко|ятками 5 и- 6 вьтолнен в виде отверс|тий 18 в рукоятке 5и. двук винтов :19s крепянщх рукоятку 5 через отверс тия 18 к коромыслу 9. На.рукоятках 5 и 6 жестко закреплены сменные накладки, например накладки 20 и 21 (фиг. 3), формы которых соответствуют слепкам кисти при крючковом типе захвата, или накладки 22 и 23 (фиг,4 формы которых соответствуют слепкам кисти при сферическом типе захвата, или накладки 24 и 25 (фиг. 5),формы которых соответствуют слепкам кисти при концевом типе захвата. Динамометр работает следующим образом. . В соответствии с исследуемым типом захвата на рукоятках 5 и 6 жест ко закрепляют одну из пар сменных, накладок 20 и 21, 22 и 23, 24 и 25 в местах их закреплений (не показаны) на рукоятках и устанавливают с помощью регулятора расстояния размер между ними, соответствующий анатомофйзиологическим особенностям кисти испытуемого и типу захвата. 34 При захвате испытуемым рукояток 5 и 6 динамометра до начала деформацрш упругого элемента 2 в процессе их. сжатия корпус 1 с закрепленными на нем упругим элементом 2 и отсчетным устройством 3 и рукоятка 6 устанавливаются по отношению к рукоятке 5 из исходного положения, изображенного на фиг. 1 и тонкими пиниями на фиг. 2, в конечное положение, изображенное толстыми линиями на фиг, 2 и, например на фиг. 3, А или 5. Таким образом, наличие в динамометре кистевом устройства самоориентации упругого элемента относительно приложенной к нему результирующей силы позволяет измерить ее истинную величину, а снабжение рукояток переменными опорными элементами в соответствии с типом захвата обеспечивает физиологически правильньй захват и снимает болевые ощущения у испытуемого, позволяя .ему проявить свои максимальные силовые возможности. Таким образом, в результате измерения обеспечиваются объективные и достоверные данные о силовых характеристиках кисти,что позволяет дифференциально .оценивать силу сжатия кисти различных типов захватов и повьппает качество диагностики и лечения.
W
Фш1
25
6 2fy
фи$.3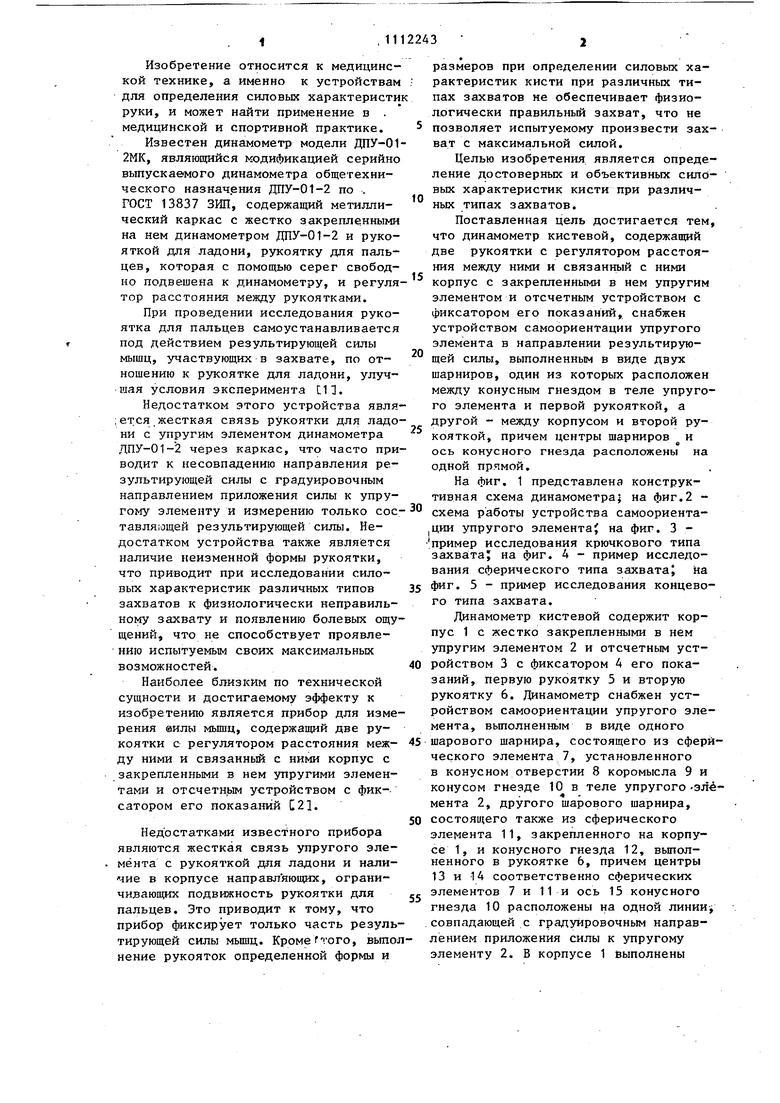
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УСИЛИЯ СЖАТИЯ КИСТИ | 2002 |
|
RU2218086C1 |
| Кистевой динамометр | 1990 |
|
SU1723465A1 |
| Способ определения силы сжатия кисти | 1982 |
|
SU1090338A1 |
| Реверсивный динамометр | 1984 |
|
SU1222244A1 |
| КИСТЕВОЙ ЭСПАНДЕР | 2022 |
|
RU2797733C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РАКЕТКИ ДЛЯ НАСТОЛЬНОГО ТЕННИСА НА ОСНОВЕ 3D ИЗОБРАЖЕНИЯ, С ТАКТИЛЬНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2012 |
|
RU2525767C2 |
| Устройство для опоры, используемое преимущественно космонавтом в скафандре в реальных и моделируемых условиях гипогравитации на поверхности Луны и Марса | 2018 |
|
RU2708133C1 |
| Тензометрический кистевой динамометр | 1988 |
|
SU1706651A1 |
| КИСТЕВОЙ ЭСПАНДЕР | 2022 |
|
RU2797730C1 |
| Кистевой эспандер | 1987 |
|
SU1493269A2 |
ДИНАМОМЕТР КИСТЕВОЙ, содержащий две рукоятки .с регулятором расстояния между ними и связанный с .1 $й«.. -S.fy ми корпус с закрепленными в нем упругим элементом и отсчетным устройством с фиксатором его показаний, о тличающийся тем, что, с целью повьппения точности замера силовых характеристик кисти при различньк типах захватов путем измерения полной результирующей силы мышц, участвующих в захвате, динамометр снабжен устройством самоориентации упругого элемента в направлении результирующей силы, выполненным в виде двух шарниров, один из которых расположен между гнездом в теле упругого элемента и первой рукояткой, а другой - между корпусом и второй рукояткой, причем центрм шарниров и (Л ось конусного гнезда расположены на одной прямой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Здравоохранение, Кишинев, 1981, № 2, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для измерения силы мышц | 1972 |
|
SU454441A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
