2. Устройство контроля плотности грунта, содержащее зонд с конусным наконечником, связанный с датчиком усилия, и измерительный прибор, отличающееся тем, что, с целью повышения точности контроля, в него введены два измерительных блока, каждый из которых состоит из последовательно соединенных между собой компаратора и интегратора, блок измерения отношения, который состоит из последовательно соединенных между собой блоков деления, суммирования и элемента памяти, и блок управления, причем первый выход блока управления соединен с соответствуюндими входами интеграторов измерительных блоков, выходы которых соединены с соответствующими входами блока деления, второй и третий выходы блока управления соединены с одними входами компараторов измерительных блоков, другие входы которых соединены с датчиком усилия, выход компаратора второго измерительного блока соединен с входом блока управления, четвертый и пятый выходы блока управления соединены с соответствующими входами сумматора, щестой выход блока управления соединен с другим входом элемента памяти, выход которого подключен к измерительному прибору.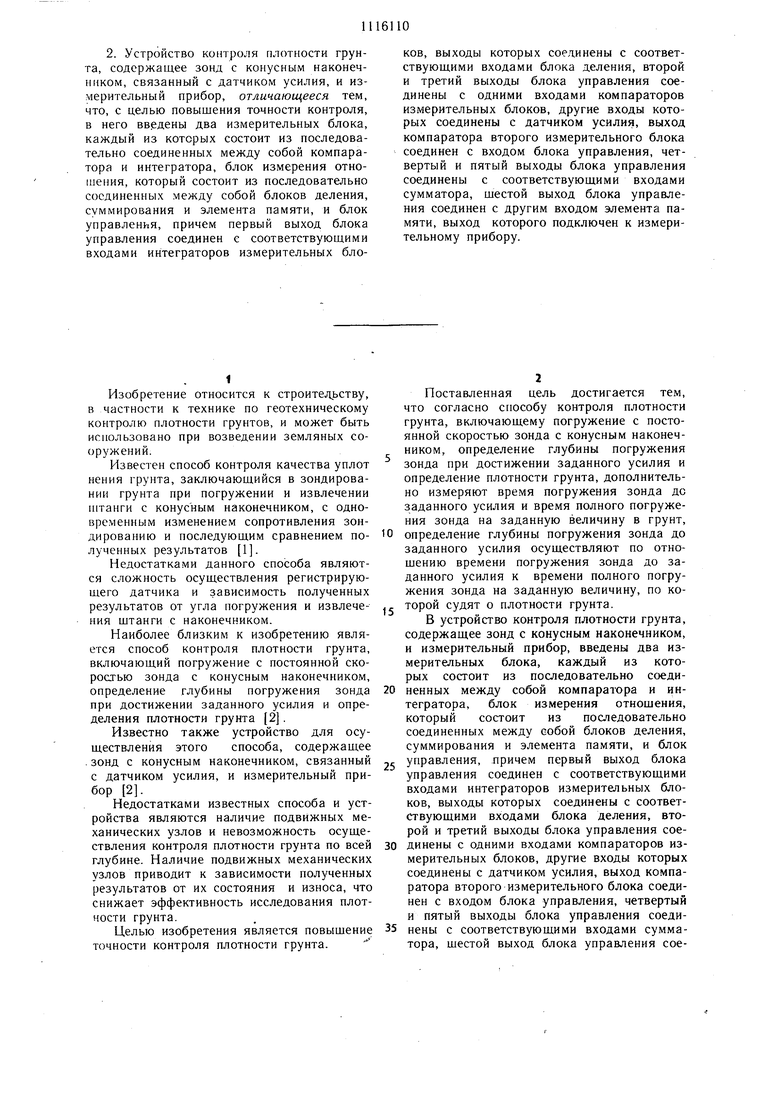
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для исследования грунта виброударным зондированием | 1976 |
|
SU737559A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕКВАДРАТИЧЕСКОГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ | 2000 |
|
RU2198410C2 |
| Измерительный преобразователь параметров емкостного датчика во временной интервал | 1990 |
|
SU1798734A1 |
| Измеритель скорости звука | 1991 |
|
SU1796918A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЛАЖНОСТИ СЫПУЧИХ МАТЕРИАЛОВ | 1992 |
|
RU2030739C1 |
| Устройство контроля степени уплотнения материала | 1986 |
|
SU1388512A1 |
| Аналого-цифровой преобразователь | 1986 |
|
SU1388987A1 |
| Устройство для измерения толщины задней стенки левого желудочка сердца | 1986 |
|
SU1389755A1 |
| Логарифмический аналого-цифровой преобразователь | 1990 |
|
SU1725397A1 |
| Устройство для измерения сопротивления изоляции сети постоянного тока | 1983 |
|
SU1128194A1 |
1. Способ контроля плотности грунта, включающий погружение с постоянной скоростью зонда с конусным наконечником, определение глубины погружения зонда при достижении заданного усилия и определение плотности грунта, отличающийся тем, что, с целью повышения точности контроля, дополнительно измеряют время погружения зонда до заданного усилия и время полного погружения зонда на заданную величину в грунт, определение глубины погружения зонда до заданного усилия осуществляют по отношению времени погружения зонда до заданного усилия к времени полного погружения зонда на заданную величину, по которой судят о плотности грунта. (Л (Si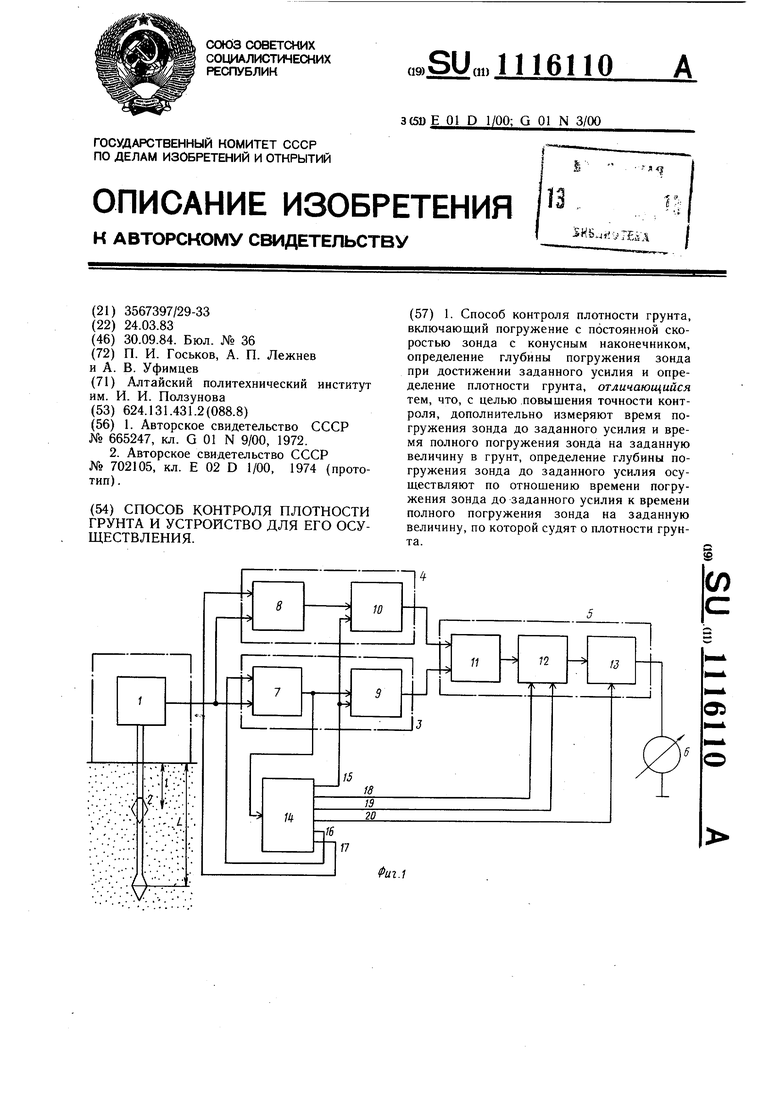
f
Изобретение относится к строител эству, в частности к технике по геотехническому контролю плотности грунтов, и может быть иснользовано при возведении земляных сооружений.
Известен способ контроля качества уплот нения грунта, заключающийся в зондировании грунта при погружении и извлечении Н1танги с конусным наконечником, с одновременным изменением сопротивления зондированию и последующим сравнением полученных результатов 1.
Недостатками данного способа являются сложность осуществления регистрирующего датчика и зависимость полученных результатов от угла погружения и извлечения щтанги с наконечником.
Наиболее близким к изобретению является способ контроля плотности грунта, включающий погружение с постоянной скоростью зонда с конусным наконечником, определение глубины погружения зонда при достижении заданного усилия и определения плотности грунта 2.
Известно также устройство для осуществления этого способа, содержащее . зонд с конусным наконечником, связанный с датчиком усилия, и измерительный прибор 2.
Недостатками известных способа и устройства являются наличие подвижных механических узлов и невозможность осуществления контроля плотности грунта по всей глубине. Наличие подвижных механических узлов приводит к зависимости полученных результатов от их состояния и износа, что снижает эффективность исследования плотности грунта.
Целью изобретения является повышение точности контроля плотности грунта.
Поставленная цель достигается тем, что согласно способу контроля плотности грунта, включающему погружение с постоянной скоростью зонда с конусным наконечником, определение глубины погружения зонда при достижении заданного усилия и определение плотности грунта, дополнительно измеряют время погружения зонда дс заданного усилия и время полного погружения зонда на заданную величину в грунт,
определение глубины погружения зонда до заданного усилия осуществляют по отношению времени погружения зонда до заданного усилия к времени полного погружения зонда на заданную величину, по ко- торой судят о плотности грунта.
В устройство контроля плотности грунта, содержащее зонд с конусным наконечником, и измерительный прибор, введены два измерительных блока, каждый из которых состоит из последовательно соеди0 ненных между собой компаратора и интегратора, блок измерения отношения, который состоит из последовательно соединенных между собой блоков деления, суммирования и элемента памяти, и блок
г управления, причем первый выход блока управления соединен с соответствующими входами интеграторов измерительных блоков, выходы которых соединены с соответствующими входами блока деления, второй и третий выходы блока управления сое0 динены с одними входами компараторов измерительных блоков, другие входы которых соединены с датчиком усилия, выход компаратора второго измерительного блока соединен с входом блока управления, четвертый и пятый выходы блока управления соеди5 нены с соответствующими входами сумматора, шестой выход блока управления соединен с другим входом :)лемемта памяти, выход которого подключсп к измерительному прибору.
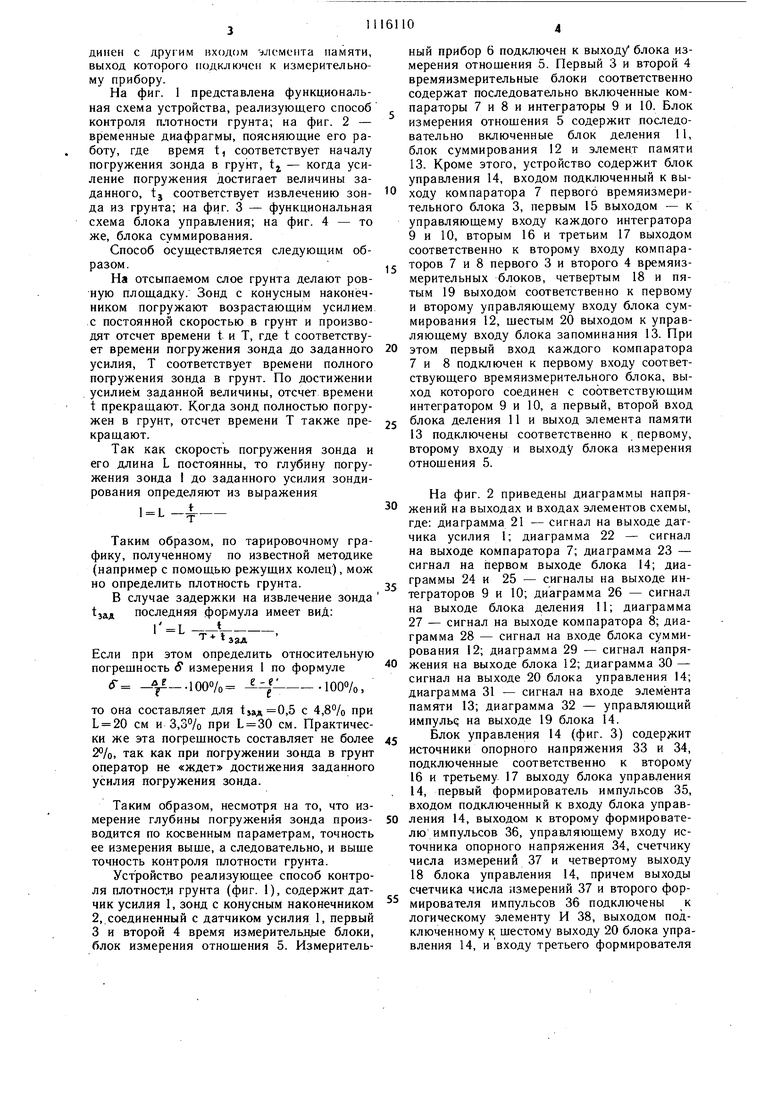
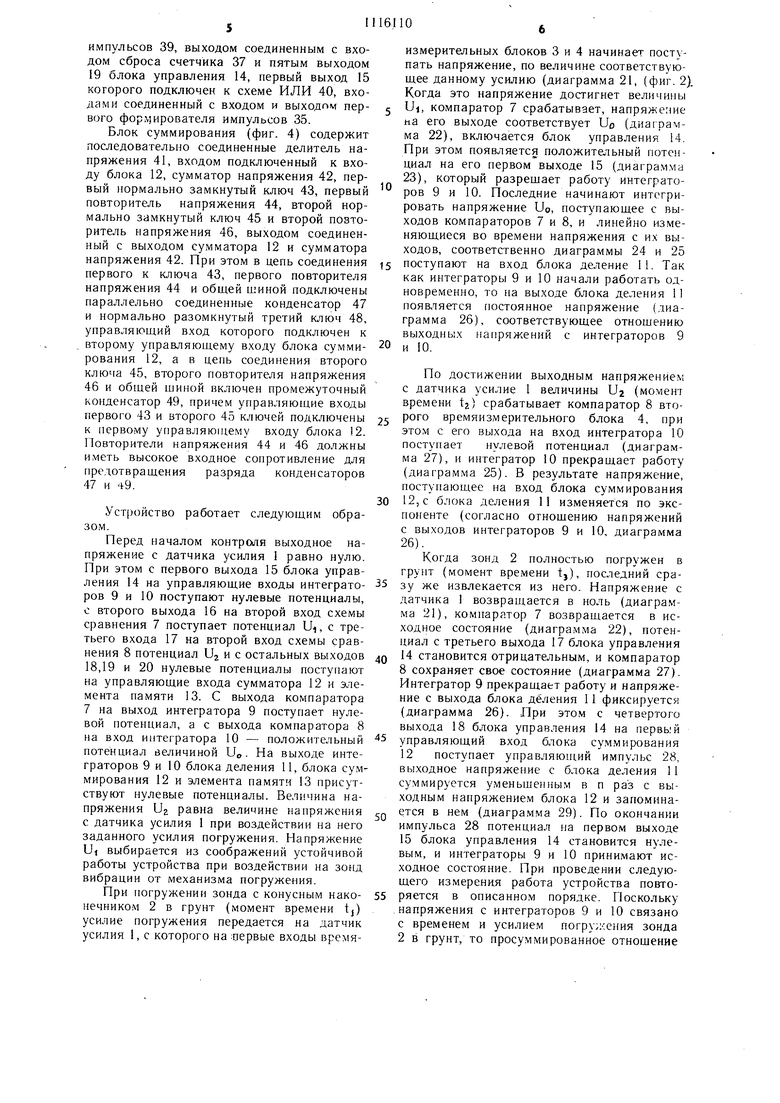
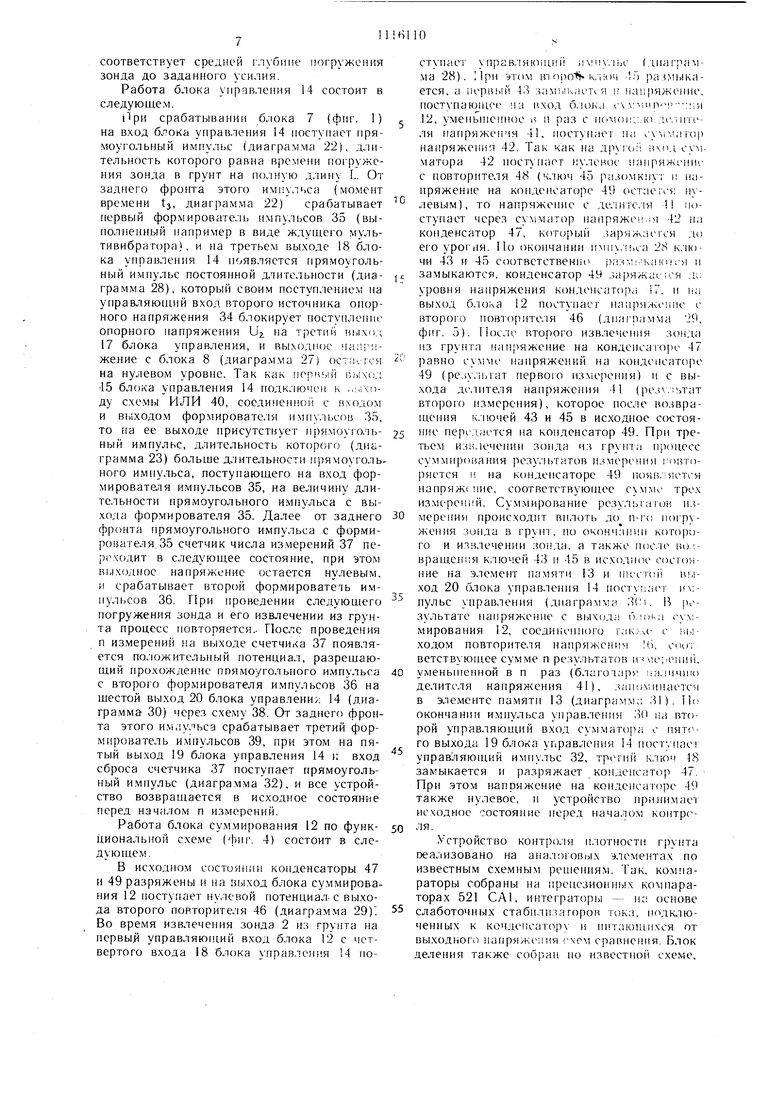
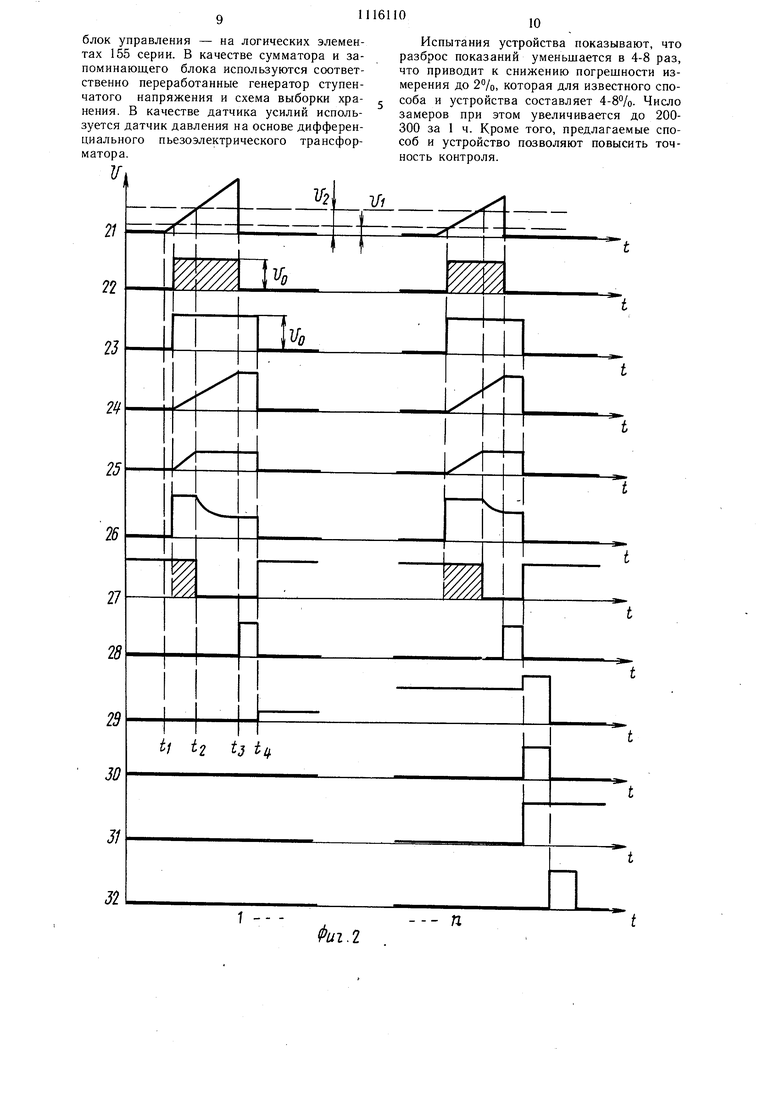
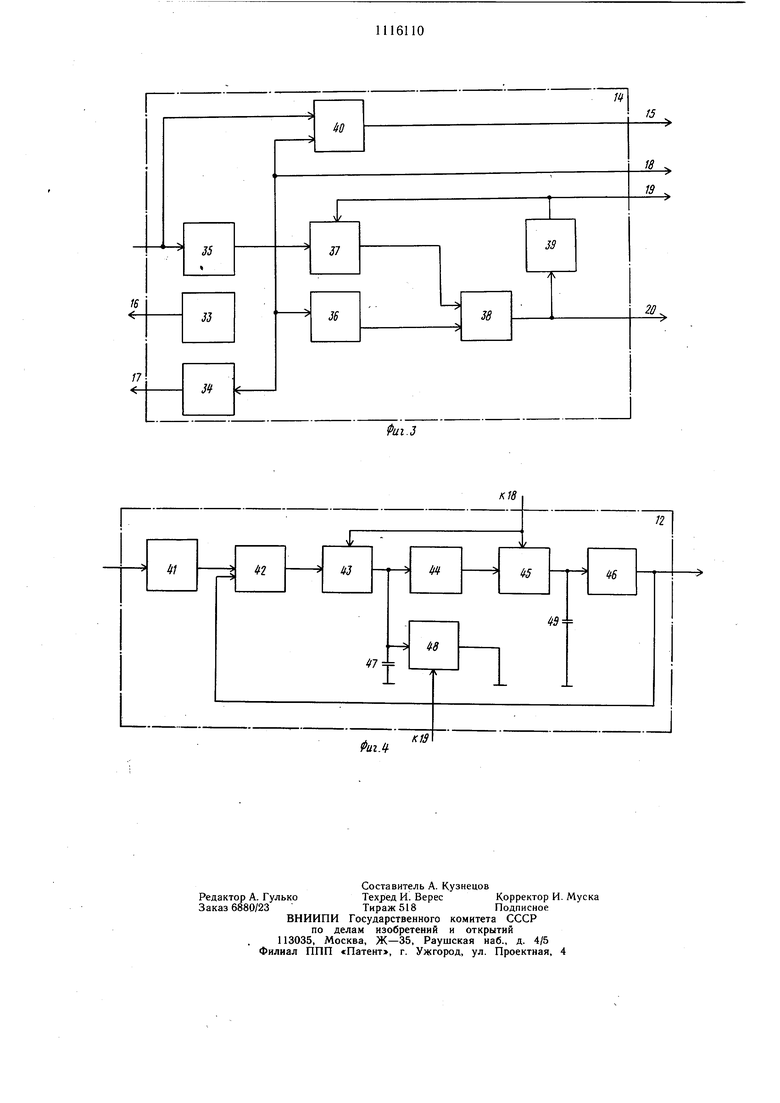
На фиг. 1 представлена функциональная схема устройства, реализующего способ контроля плотности грунта; на фиг. 2 - временные диафрагмы, поясняющие его работу, где время t, соответствует началу погружения зонда в грунт, tj - когда усиление погружения достигает величины заданного, tj соответствует извлечению зонда из грунта; на фиг. 3 - функциональная схема блока управления; на фиг. 4 - то же, блока суммирования.
Способ осуществляется следующим образом.
На отсыпаемом слое грунта делают ровную площадку. Зонд с конусным наконечником погружают возрастающим усилием с постоянной скоростью в грунт и производят отсчет времени t и Т, где t соответствует времени погружения зонда до заданного усилия, Т соответствует времени полного погружения зонда в грунт. По достижении усилием заданной величины, отсчет времени t прекращают. Когда зонд полностью погружен в грунт, отсчет времени Т также прекращают.
Так как скорость погружения зонда и его длина L постоянны, то глубину погружения зонда I до заданного усилия зондирования определяют из выражения
Таким образом, по тарировочному графику, полученному по известной методике (например с помощью режущих колец), мож но определить плотность грунта.
В случае задержки на извлечение зонда зад последняя формула имеет вид:
.
т+ t
зад
Если при этом определить относительную погрещность У измерения 1 по формуле
то она составляет для ,5 с 4,8% при 1 20 см и 3,3% при L 30 см. Практически же эта погрещность составляет не более 2%, так как при погружении зонда в грунт оператор не «ждет достижения заданного усилия погружения зонда.
Таким образом, несмотря на то, что измерение глубины погружения зонда производится по косвенным параметрам, точность ее измерения выще, а следовательно, и выще точность контроля плотности грунта.
Устройство реализующее способ контроля плотности грунта (фиг. 1), содержит датчик усилия 1, зонд с конусным наконечником 2, соединенный с датчиком усилия 1, первый 3 и второй 4 время измерительдые блоки, блок измерения отнощения 5. Измерительный прибор 6 подключен к выходу блока измерения отнощения 5. Первый 3 и второй 4 времяизмерительные блоки соответственно содержат последовательно включенные компараторы 7 и 8 и интеграторы 9 и 10. Блок измерения отнощения 5 содержит последовательно включенные блок деления 11, блок суммирования 12 и элемент памяти 13. Кроме этого, устройство содержит блок управления 14, входом подключенный к выходу компаратора 7 первого времяизмерительного блока 3, первым 15 выходом - к управляющему входу каждого интегратора 9 и 10, вторым 16 и третьим 17 выходом соответственно к второму входу компара5 торов 7 и 8 первого 3 и второго 4 времяизмерительных блоков, четвертым 18 и пятым 19 выходом соответственно к первому и второму управляющему входу блока суммирования 12, щестым 20 выходом к управляющему входу блока запоминания 13. При
0 этом первый вход каждого компаратора 7 и 8 подключен к первому входу соответствующего времяизмерительного блока, выход которого соединен с соответствующим интегратором 9 и 10, а первый, второй вход
5 блока деления 11 и выход элемента памяти 13 подключены соответственно к первому, второму входу и выходу блока измерения отнощения 5.
На фиг. 2 приведены диаграммы напря0 жений на выходах и входах элементов схемы, где: диаграмма 21 - сигнал на выходе датчика усилия 1; диаграмма 22 - сигнал на выходе компаратора 7; диаграмма 23 - сигнал на первом выходе блока 14; диаграммы 24 и 25 - сигналы на выходе интеграторов 9 и 10; диаграмма 26 - сигнал на выходе блока деления 11; диаграмма 27 - сигнал на выходе компаратора 8; диаграмма 28 - сигнал на входе блока суммирования 12; диаграмма 29 - сигнал напря0 жения на выходе блока 12; диаграмма 30 - сигнал на выходе 20 блока управления 14; диаграмма 31 - сигнал на входе элемента памяти 13; диаграмма 32 - управляющий импульс; на выходе 19 блока 14.
, Блок управления 14 (фиг. 3) содержит источники опорного напряжения 33 и 34, подключенные соответственно к второму 16 и третьему 17 выходу блока управления 14, первый формирователь импульсов 35, входом подключенный к входу блока управ0 ления 14, выходом к второму формирователю импульсов 36, управляющему входу источника опорного напряжения 34, счетчику числа измерений 37 и четвертому выходу 18 блока управления 14, причем выходы счетчика числа измерений 37 и второго фор мирователя импульсов 36 подключены к логическому элементу И 38, выходом подключенному к шестому выходу 20 блока управления 14, и входу третьего формирователя
импульсов 39, выходом соединенным с входом сброса счетчика 37 и пятым выходом 19 блока управления 14, первый выход 15 когорого подключен к схеме ИЛИ 40, входами соединенный с входом и выходом первого фор1мирователя импульсов 35.
Блок суммирования (фиг. 4) содержит последовательно соединенные делитель напряжения 41, входом подключенный к входу блока 12, сумматор напряжения 42, первый нормально замкнутый ключ 43, первый повторитель напряжения 44, второй нормально замкнутый ключ 45 и второй повторитель напряжения 46, выходом соединенный с выходом сумматора 12 и сумматора напряжения 42. При этом в цепь соединения первого к ключа 43, первого повторителя напряжения 44 и обшей шиной подключены параллельно соединенные конденсатор 47 и нормально разомкнутый третий ключ 48, управляюший вход которого подключен к второму управ пяюшему входу блока суммирования 12, а в цепь соединения второго ключа 45, второго повторителя напряжения
46и обшей шиной включен промежуточный конденсатор 49, причем управ.чяюшие входы первого 43 и второго 45 ключей подключены к 1ервому управляющему входу блока 12. Повторители напряжения 44 и 46 должны иметь высокое входное сопротивление для предотврашения разряда конденсаторов
47и 49.
Устройство работает следуюшим образом.
Перед началом контроля выходное напряжение с датчика усилия 1 равно нулю. При этом с первого выхода 15 блока управления 14 на управляюш.ие входы интеграторов 9 и 10 поступают нулевые потенциалы, с второго выхода 16 на второй вход схемы сравнения 7 поступает потенциал Ui, с третьего входа 17 на второй вход схемы сравнения 8 потенциал Uj и с остальных выходов 18,19 и 20 нулевые потенциалы поступают на управляюшие входа сумматора 12 и элемента памяти 13. С выхода компаратора 7 на выход интегратора 9 поступает нулевой потенциал, а с выхода компаратора 8 на вход интегратора 10 - положительный потенциал величиной Up. На выходе интеграторов 9 и 10 блока деления 11, блока суммирования 12 и элемента памяти 13 присутствуют нулевые потенциалы. Величина напряжения Уг равна величине напряжения с датчика усилия 1 при воздействии на него заданного усилия погружения. Папряжение и выбирается из соображений устойчивой работы устройства при воздействии на зонд вибрации от механизма погружения.
При погружении зонда с конусным наконечником 2 в грунт (момент времени tj) усилие погружения передается на датчик усилия 1, с которого на :первые входы времяизмерительных блоков 3 и 4 начинает поступать напряжение, по величине соответствуюшее данному усилию (диаграмма 21, (фиг. 2). Когда это напряжение достигнет величины Ui, компаратор 7 срабатывает, напряжение на его выходе соответствует Uo (диаграмма 22), включается блок управления 14. При этом появляется положительный потенциал на его первом выходе 15 (диаграмма 23), который разрешает работу интеграто ров 9 и 10. Последние начинают интегрировать напряжение Uo, поступаюшее с выходов компараторов 7 и 8, и линейно изменяюшиеся во времени напряжения с их выходов, соответственно диаграммы 24 и 25
5 поступают на вход блока деление И. Так как интеграторы 9 и 10 начали работать одновременно, то на выходе блока деления 11 появляется постоянное напряжение (диаграмма 26), соответствуюшее отношению выходных напряжений с интеграторов 9
0 и 10.
По достижении выходным напряжением с датчика усилие 1 величины V (момент времени i срабатывает компаратор 8 вто5 рого времяизмерительного блока 4, при этом с его выхода на вход интегратора 10 поступает нулевой потенциал (диаграмма 27), и интегратор 10 прекращает работу (диаграмма 25). В результате напряжение, поступаюшее на вход блока суммирования
0 12,с блока деления 11 изменяется по экспоненте (согласно отношению напряжений с выходов интеграторов 9 и 10, диаграмма 26).
Когда зонд 2 полностью погружен в грунт (момент времени tj), последний сра5 зу же извлекается из него. Напряжение с датчика 1 возвращается в ноль (диаграмма 21), комнаратор 7 возврашается в исходное состояние (диагра.м.ма 22), потенциал с третьего выхода 17 блока управления
0 14 становится oтpицaтeJ ьным, и компаратор 8 сохраняет свое состояние (диаграмма 27). Интегратор 9 прекращает работу и напряжение с выхода блока деления 11 фиксируется (диаграмма 26). При этом с четвертого выхода 18 блока управления 14 на первый
5 управляюший вход блока су.ммирования 12 поступает управляюший импульс 28, выходное напряжение с блока деления 11 суммируется уменьшенным в п раз с выходным напряжением блока 12 и запоминад ется в нем (диаграмма 29). По окончании импульса 28 потенциал на первом выходе 15 блока управления 14 становится нулевым, и интеграторы 9 и 10 принимают исходное состояние. При проведении следующего измерения работа устройства повто5 ряется в описанном порядке. Поскольку напряжения с интеграторов 9 и 10 связано с временем и усилием погру;хеиия зонда 2 в грунт, то просуммированное отношение
соответствует средней глубине погружения зонда до заданного усилия.
Работа блока управления 14 состоит в следующем.
ilpH срабатывании блока 7 (фиг. 1) на вход блока унравлеиия 14 ностунает прямоугольный имнульс (диаграмма 22), длительность которого равна времени погружения зонда в грунт на полную длину L. От заднего фронта этого им1 ульса (момент времени tj, диаграмма 22) срабатывает первый формирователь импульсов 35 (выполненный например в виде ждущего мультивибратора), и на третьем выходе 18 блока управления 14 появляется пря.моугольный имнульс постоянной длительности (диаграмма 28), который свои.м ноступление.м на управляющий вход второго источника опорного напряжения 34 блокирует поступлеьие опорного напряжения U на третий ().i 17 блока управления, и выходное Haiir;;жение с блока 8 (диаграмма 27) оста-гея на нулевом уровне. Так как первый iis.ixo.i 15 блока управления 14 нодк;|ючеп к ,,:.;.:)ду схе.мы ИЛИ 40, соединенной с входом и выходом формировате.1я импульсов 35, то на ее выходе присутствует прямоугольный импульс, длительность которо1Т) (диаграмма 23) больше д.чительности прямоугольного импульса, постунаюш,его на вход формировате,;1я импульсов 35, на величину длительности прямоугольного импульса с выхода формирователя 35. Далее от заднего фронта прямоугольного импульса с формирователя. 35 счетчик числа измерений 37 переходит в следующее состояние, при этом выходное напряжение остается нулевым, и срабатывает второй фор.мироватеть имnyл)Coв 36. При проведении следующего погружения зонда и его извлечении из грунта процесс повторяется.. После проведения п из.мерений на выходе счетчика 37 появляется по.южительный потенциал, разрешающий прохождение прямоугольного импульса с второго формирователя импульсов 36 на шестой выход 20 блока управления 14 (диаграмма 30) через схему 38. От заднего фронта этого имлульса срабатывает третий формирователь импульсов 39, при этом на пятый выход 19 блока управления 14 к вход сброса счетчика 37 поступает прямоугольный импульс (диаграмма 32), и все устройство возвращается в исходное состояние перед началом п измерений.
Работа блока суммирования 12 по функциональной схеме (фиг. 4) состоит в следуюнхем.
В исходном состоянии конденсаторы 47 и 49 разряжены и на выход блока суммирования 12 ноступает нулевой потенциал-с выхода второго повторителя 46 (диаграмма 29) Во время извлечения зонда 2 из грунта на первый управляюп1ий вход блока 12 с четвертого входа 18 блока управления 14 поступает управ.чяюпии шипмьс ( 28). При этом вп ,;н)ч In ра.и п ается, а первый 43 зам1,пч;1ст1 я if п;и:ряжепие, гюст паюн1ее на вход б.ижа , -12, уменьшенное п раз с пс;АИ),;;К1 лс.ипчля папряжепчя 41, ноступает п;: -учр.кггор напряжения 42. Так как на )Г: HVO.I сумматора 42 ноступает нулевое напряжепиг с повторителя 48 (ключ 45 разомкнут и напряжение на конденсаторе 49 остае; - ; н левым), то напряжение с де/пгге.пя поступает через сумматор напряжен,iM 42 на конденсатор 47, KOToj bnt ларяж.аегся .чо его урогня. По окончании пмпу.чьса 28 ключи 43 и 45 соответственно |), ;-1Мька(1Чя н замыкаются, конденсатор 49 заряжавюя д;: уровня напряжения конденсатора i7, н ii;i выход блока 12 поступаег напрян еппс с второго повторителя 46 (диаграмма 29, фиг. 5). После второго извлечения зонда из грунта напряжение на конденсагоре 47 равно сумме нанряжений на конденсаторе 49 (pe.iV.nnaT первою измерения) и с выхода делителя напряжения 41 (|1ез.ьтат второго измерения), которое носле возвращения ключей 43 и 45 в исходное состояние передается па конденсатор 49. При третьем изилечении зонда из групта процесс суммиро1 ания резу.чьтатов измерения говторяется 11 на конденсаторе 49 появ.яетея напряж1 пие, соответствуюп1ее ( трех измерений. Суммирование результатов, H.Iмерения происходит вплоть до n-io погружения зонда в грунт, но окончании которого и извлечении зонда, а также после во.;врашеипя ключей 415 п 45 в исходное состояние на элемент памяти 13 и liiecroii шлход 20 блока управления 14 noci yiiai-r п ;пульс управления (диаграм ;а ЗГ:;. В результате напряжение с выходи б.юка -ух;мирования 12, соединеппо1Ч) гак;,и- е iii,.iходом повторителя напрях енич Ki, ооог ветствуюигее сумме п результатов 1г ме;еппй, уменыиенной в п раз (благотар5 па.чичпю делителя напряжения 41), зап-лмипаетси в элементе памяти 13 (диаграмм;: 31). П{ окончании имиульса управления iid па второй управляющий вход сумматора е пятого выхода 19 блока управления 14 пост;л1ает управляющий импульс 32, трегий к.1юч 48 замыкается и разряжает конденсатор 47. При этом напряжение на конденсаторе 49 также нулевое, и устройство принимает исходное состояние перед началом контроля.
Устройство контр();1я н.ютности грунта оеализовано на аналоговых элементах по известным схемным решениям. Так, ко.мпараторы собраны на прецезионнь х компараторах 521 СА1, интеграторы - на основе слаботочных стабилизаторов тока, подключенных к конденеатс1ру и питающихся от выходного напряж1 ;1пя ехем сравнсрнт. Блок деления также собран но известной схеме.
блок управления - на логических элементах 155 серии. В качестве сумматора и запоминающего блока используются соответственно переработанные генератор ступенчатого напряжения и схема выборки хранения. В качестве датчика усилий используется датчик давления на основе дифференциального пьезоэлектрического трансформатора.
-If2
Ifn
Мп
1
1 iz tj i
Фиг.2
Испытания устройства показывают, что разброс показаний уменьшается в 4-8 раз, что приводит к снижению погрешности измерения до 2%, которая для известного способа и устройства составляет 4-8%. Число замеров при этом увеличивается до 200300 за 1 ч. Кроме того, предлагаемые способ и устройство позволяют повысить точность контроля.
t
- n
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения плотности материала | 1977 |
|
SU665247A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ исследования плотности грунта и устройство для его осуществления | 1978 |
|
SU702105A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
