Свеклоуборочные комбайны, у которых рабочие орггшы размещены на барабане, а также способ уборки свеклы по принципу теребления корней за ботву с помощью теребильных лап известны.
Основными недостатками существующих свеклоуборочных комбайнов являются: большая потребность в рабочей силе (3--1 человека на комбайн, включая тракториста), нростои. затрязненность готовой продукции, больщие потери ботвы, а также потери корней в почве и их повреждение.
Конструктивное рещение предлагаемого комбайна в целом, отдельных рабочих органов и их взаимодействия позволяет создать прогрессивную технологию уборки свеклы, лищенную указанных недостатков.
Отличительные конструктивные особенности описываемого комбайна состоят; а) в применении вращающегося на оси теребильного барабана, снабженного дискообразньпги боковинами, несущими рабочие органы и разделяющими барабан на камеры управления и рабочие камеры по числу обрабатываемых рядков; б) подпружиненных теребильных лап и подхватников, поворотно закрепленных в камерах управления у наружных стенок дискообразных боковин; в) невращающихся дисков, свобол;но монтированных на оси барабана в центре камер управления, снабженных двумя ведущими дорожками, по которым скользят ролики подхватников и теребильных лан; г) вырави1 вателей, щарнирнозакреиленных на осях в продолговатых отверстиях концов теребильных лап, осуществляющих предварительный захват ботвы в момент скольжения по ней ослабленных лап; д) внутренних транспортеров для удаления ботвы, размещенных в рабочих камерах.
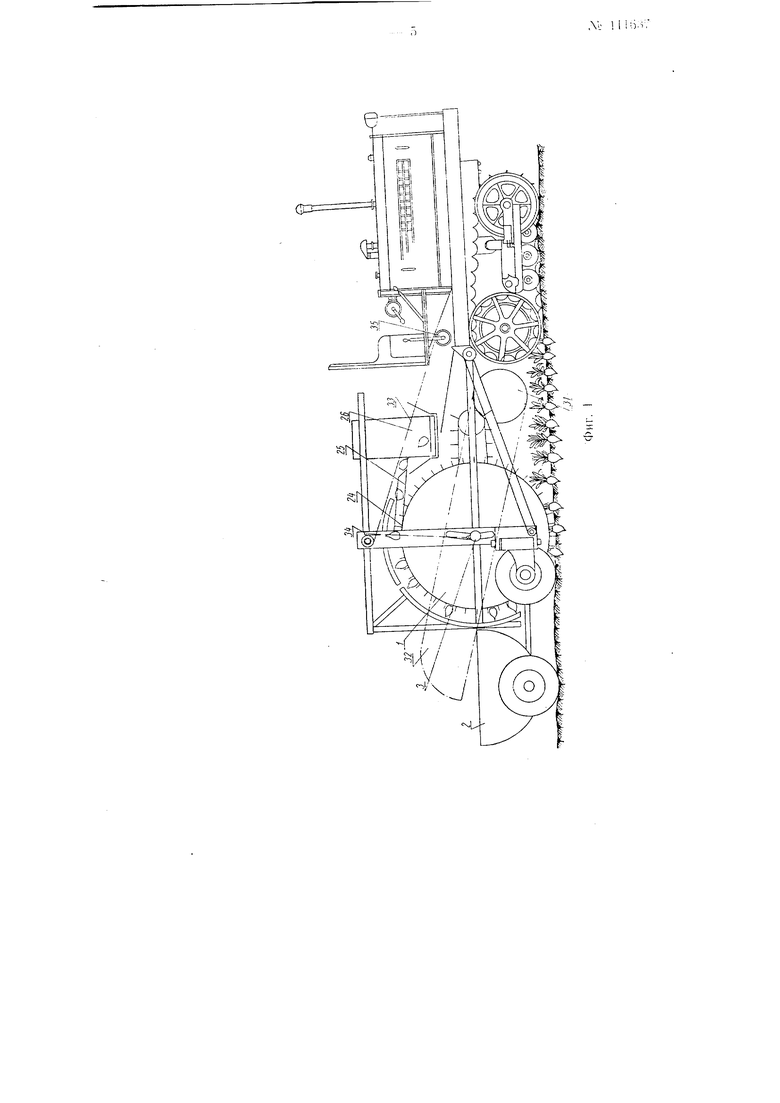
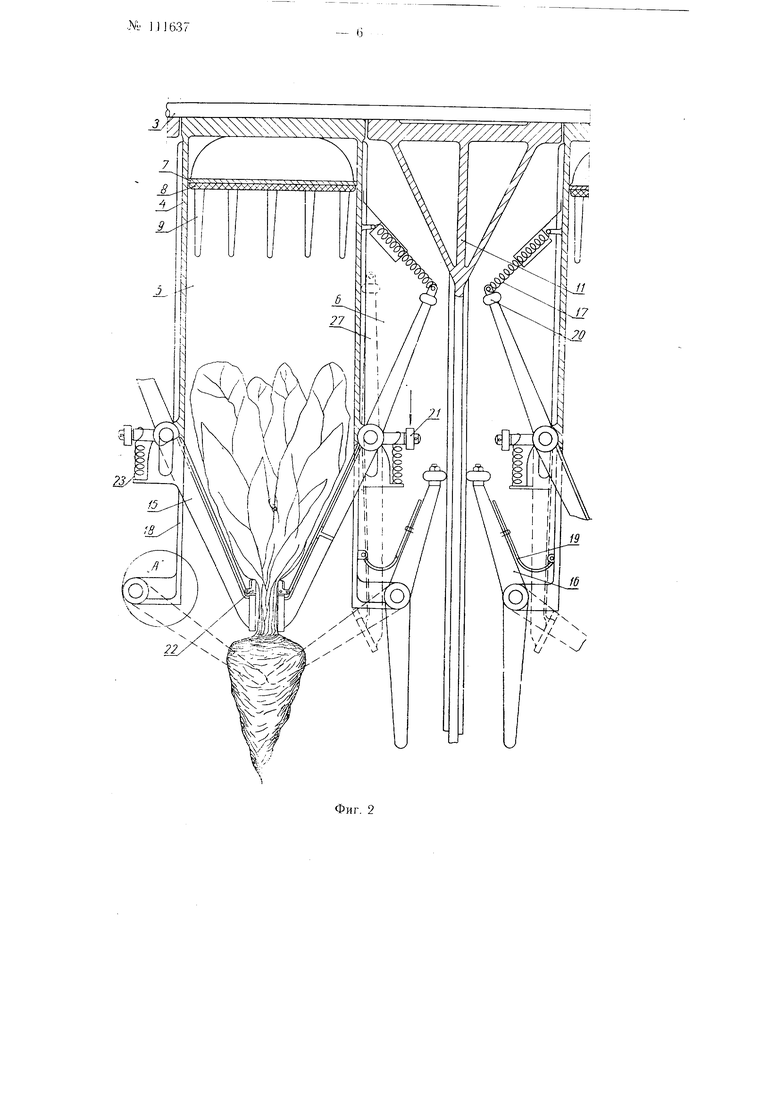
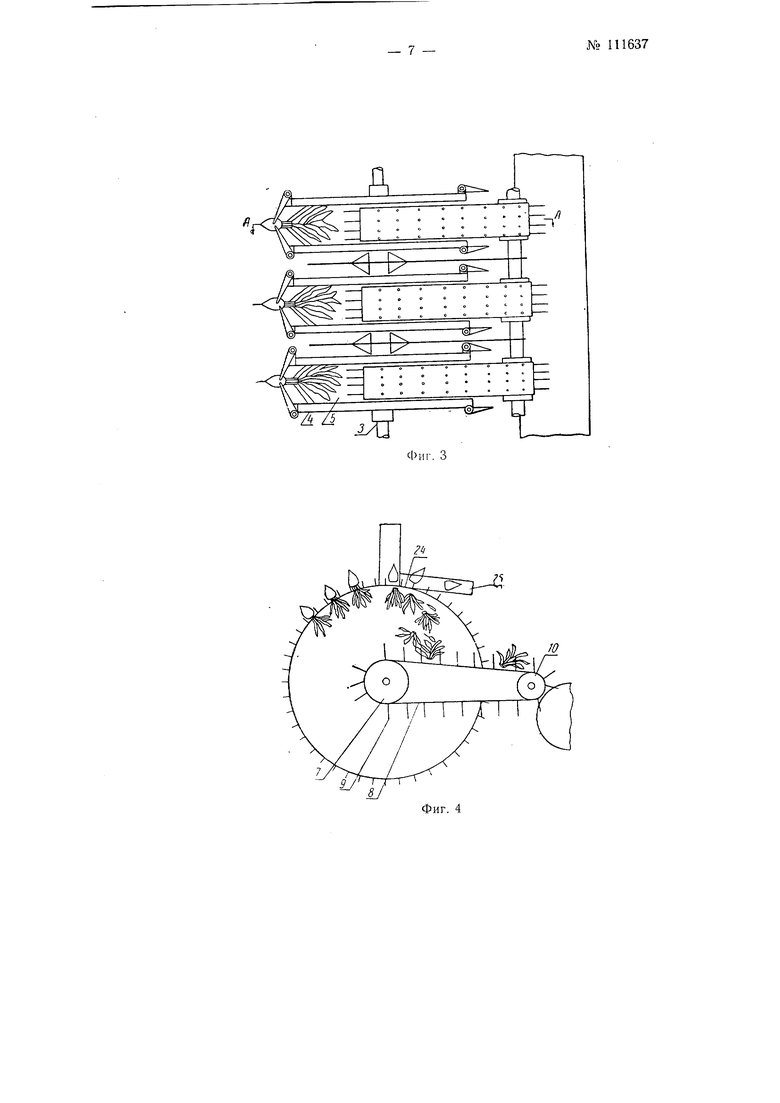
На фиг. 1 представлен общий вид комбайна с трактором; на фиг. 2- частичный продольный разрез нижних головок камер управления и рабочих камер с рабочими органами; на фиг. 3 - рабочее положение подхватников; па фиг. 4-удаление ботвы н корней, разрез по .4.4 на фиг. .3:
Л1Ь 1116372
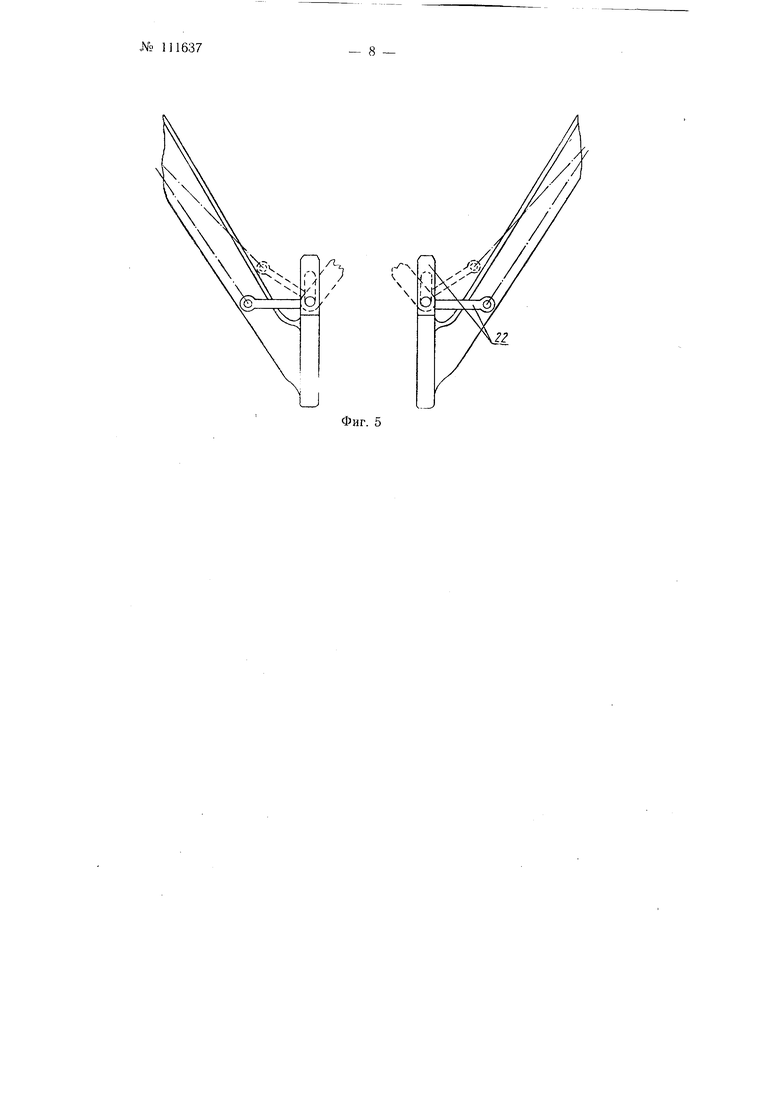
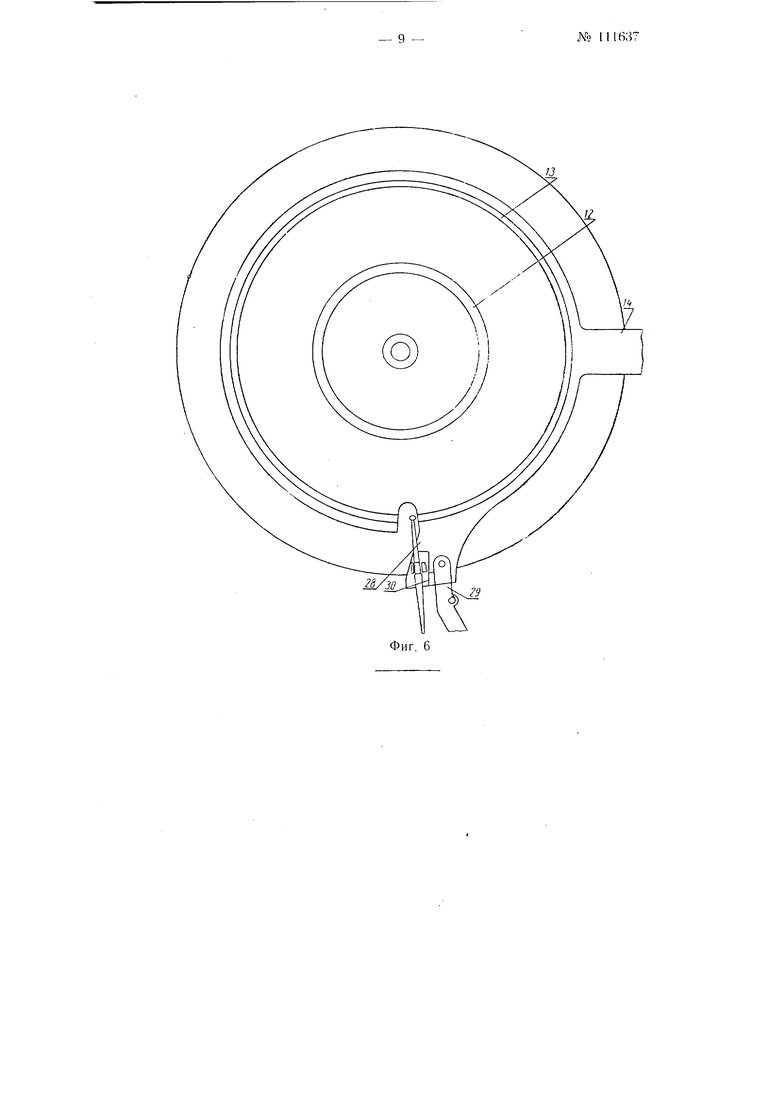
ма фиг. 5 - вид спереди на ведущие и-лечи теребильных лап с выравнивателями; на фиг. 6 - вид сбоку на невращающийся диск с дорожками.
Комбайн состоит из теребильного барабана /, полунавешенного на трактор, и бункера 2 для ботвы, прицепленного сзади. Все управление процессом теребления сосредоточено у тракториста, который одновременно является и комбайнером.
Комбайн рассчитан на обработку тре.х рядков одновременно. В соответствии с этим на одной общей его оси , на щлицах насажены щесть дискообразных боковин 4, образующих попарно три рабочие камеры 5 и три камеры управления 6. Последние предопределяют рабочий процесс, а первые его воспроизводят.
Внутри рабочих камер заодно с боковинами вращаются щкивы 7 с перекинутыми через них транспортерными лентами S с пальцами 9 для удаления ботвы. Другие шкивы Ю этих лент установлены за пределами камер.
Внутри камер управления (У, на общей оси 3, свободно насажены невращающиеся диски //, снабженные с обеих сторон ведущими дорожками 12 и 13 для подхватников и теребильных лап, ролики которых скользят по этим дорожкам. От вращения эти диски удерживаются своими стопорными выступами /, закрепленными за пределами барабана. Теребильиые лапы 15 только лишь смыкаются между собой в рабочей камере 5, расположены же они в камере управ.пения 6. Там же укреп.лены и подхватники 16.
Для смыкания между собой под действием пружин П полови 1ки лап должны пройти через щели 18 в боковинах 4. разделяющих камеры. У подхватников такое с.мыкание, под действие.м пружин 19, происходит за пределами рабочей камеры. Точки поворота последних расположены по Г-образной кромке «А (фиг. 2), к()то)ая с.тужит также п ободком прочности боковины.
Операция выравнивания начинается, не доходя 10 градусов до верхней точки барабана и длится по времени около 2 секунд. За этот период ролик 20 лапы, набегая на кулачок дорожки, должен отклонить лапу и ослабить зажатую ботву. Одновременно с этим обе половинки лапы при помощи роликов 21 получают движепие от центра к периферии, как показано стрелкой на фиг. 2. Ослабленные лапы свободно скользят по ботве до упора в головку корня, где вновь смыкаются. Пропуская по себе лапу, сама ботва остается неподвижной, ее удерживает на месте специальное устройство или выравниватель .25 (фиг. 5).
Выравниватель является продолжением лапы и действует как ее деталь. Каждая из половинок лапы как бы срезана на одну треть своей длины и снова присоединена к пей уже на шарнире с продолговатым отверстием для соединяющей оси. С тыльной стороны к поворачивающейся части приваривается под прямым углом рычаг, соединенный гибким тросом с боковиной у линии поворота лапы и соосно с ней так, что радиусы их, в состоянии покоя, соразме шы. Когда же радиус лапы удлиняется, длина троса остается постоянной, вследствие чего выравниватель поворачивается вокруг своей оси, зажимая ботву. Сама лапа беспрепятственно движется, б.лагодаря продолговатому отверстию для оси в ее теле.
Пружина 23 ставит лапу в исходное положение.
Операция обрезки ботвы начинается на самой верхней точке барабана. Нож 24 закреплен под углом к вертикали у этой точки, с наклоном по ходу движения нережущей его плоскости с таким расчетом, чтобы отрезанные корни, подталкиваемые друг другом, могли бы скатываться по этой плоскости ножа вниз на транспортер 26. Для этой цели наклонная плоскость ножа 25 делается в виде лотка.
Нож закрепляется неподвижно, режущая кромка его имеет форму клина.
Корень надвигается на нож будучи зажатым за ботву теребильной лапой под ножом и сверху - подхватниками.
Последние, миновав режущую кромку, наталкиваются на развилку, которая, расширяясь, приподнимает их все больше и больще, преодолевая сопротивление пружин, пока не приведет в плоскость боковин, где они и блокируются собачкой на весь путь по второй по.:1уокружности. Ролики их снова остаются в бездействии. Состояние покоя лапы длится на пути половины круга. Она в это время находится в своем гнезде, расположенном в камере управления, куда проникает через щель в боковине и, проникая, очищается от приставщей ботвы.
Операция обрезки длится на дуге около 10-15 или около 150 мм, после чего ботва окажется над движущимся транспортером S. Под действием ведущей дорожки лапа в этот момент раскроется, заняв положение 27 (фиг. 2). Освободивщаяся ботва, падая на транспортер, выносится им за пределы барабана (фиг. 4).
Такое же иолоисение и у роликов подхватников на этом пути.
Операция извлечения корня из грунта начинается на подход е к нему. Первыми вонзаются подхватники, которые в этот период играют роль шпор. Они входят в землю вертикально на расстоянии 100 мм от центра рядка каждый. Но лапы смыкаются у ботвы первыми. Этому предшествует снятие стопора собачки (па чертеже не показано) и тогда, под действием отжимающих пружин 17, они сомкнутся и зажмут между собой ботву, подготовленную ботвоподъемником. В этот же момент pa.iблокировываются и подхватники, находящиеся в земле. Под действием своих пружин 19, подталкиваемые бровками (на чертеже не показаны), ведущие плечи подхватника проваливаются в выемку невращающегося диска и устанавливаются в положение подхвата (фиг. 2 и 3). Подталкивающие бровки при этом, действуют на очень коротком отрезке, почти илшульсио, преодолевая сопротивление грунта. Подхватники прижимаются к корню только при помощи пружин.
Невращающяйся диск, устаноБ,1енный в центре камер управ.чсния, ИлМеет в нижней своей части специальный выступ 28 для крепления подкапывающей лапы 29 (фиг. 6). Последняя крепится к нему шарнирно. В рабочем положении она опирается на упор 30, установленный сзади лапы, ниже подвеса. Спереди к лапе, тоже ниже подвеса, крепится uiapнирно тяга, другой конец которой соединен с мотылем вала у трактора. Поворотом вала на определенный угол все три лапы одновременно мо1ут быть выведены и.ш введены в действие.
Извлеченные за ботву и подта,1киваемые подхватниками сзади корни будут продолжать свое движение по кругу снизу вверх, подвергаясь счистке от грунта на длине полуокружности барабана, вплоть до выравкнвания (170).
Ботва, иослс выноса из барабана, попадает сначала в двухсторонний шнек 31, а из него в бортовые транспортеры 32 и в бункер. Схема пути ее движения от захвата до бункера показывает, что ботва не загрязняется в процессе теребления и полностью сохраняется.
Регулирование барабана по высоте установки его над головками корней осуществляется подъемом или опусканием при помощи троса 5,, ролика 34 и барабана 35.
№ 111637
П р е д м е т и з обре т е н и я
1.Свеклоуборочный полунавесной комбайн с подкапывающими органами и транспортерами, опирающийся на два самоустанавливаюшиеся копирующие колеса, отличающийся тем, что, с целью более надежной работы, повыщения производительности и качества уборки свеклы, с минимальными потерями корней в почве, в нем применен вращаю, щийся на оси теребильный барабан,-снабженный дискообразными боковинами, несущими рабочие органы ч разделяющими барабаны на камеры управления и рабочие камеры, но числу обрабатываемых рядков.
2.Форма выполнения барабана по п. 1, о т л и ч а ю щ а я с я тем, что, с целью обеспечения базирования корней и выполнения в одном цикле операций извлечения, очистки, выравнивания, обрезкн и передачи корней и ботвы на транспортеры, в нем применены подпружиненные теребильные лапы и подхзатникл, новирошо закрепленные на наружных стенках дискообразных боковин в камерах управления, осуществляющие технологические операции в рабочих камерах.
3.Форма выполнения барабана по по. 1 и 2, отличающаяся тем, что, с целью обеспечения смыкания и размыкания подпружиненных теребильных лап и подхватников, в нем применены невращающиеся диски, свободно монтированные на оси барабана в центре камер управления, снабженные двумя ведущими дорожками, по которым скользят ролики подхватников и теребильных лап.
4.Форма выполнения барабана по пп. 1-3, о т л и чаю щ. а я с я тем. что, с целью выравнивания корней относительно центра барабана, в радиальном положении и предварительного захвата ботвы для обеспечения возможности продвижения ослабленных .лап вдоль ботвы для последующего зажима ее с выравненными корнями, в нем применены выравнители в виде угловых двуплечих рычагов, снабженных тягами и шарнирно закрепленных на осях в продолговатых отверстиях концов теребильных лап.
5.Форма выполнения барабана по пи. 1-4, отличающаяся тем, что, с целью удаления ботвы за пределы барабана без потерь, в рабочих камерах размещены транспортеры.
Ih. Ib
| название | год | авторы | номер документа |
|---|---|---|---|
| Свеклоуборочная машина | 1960 |
|
SU132452A1 |
| Свеклоуборочный комбайн | 1958 |
|
SU122974A1 |
| Свеклоуборочный комбайн теребильного типа | 1961 |
|
SU148625A1 |
| Свеклоуборочный комбайн для поливных и переувлажненных почв | 1959 |
|
SU125434A1 |
| Свеклоуборочная машина | 1935 |
|
SU51071A1 |
| Сепаратор барабанного типа для картофелеуборочного комбайна | 1957 |
|
SU116073A1 |
| Комбайн для уборки корнеплодов | 1983 |
|
SU1127539A1 |
| Приспособление к свеклоуборочным и тому подобным машинам для очистки от марлей | 1938 |
|
SU58157A1 |
| Свеклоуборочный комбайн | 1975 |
|
SU538680A1 |
| Комбайн для уборки сахарной свеклы | 1960 |
|
SU131999A1 |
0