(-г) VP при , p p 1C41 tt+2 номера признаков где m.rnj. ..fn которым производ поиск; номера групп, к торым относятся 1. объекты no соответствующим признакам, остальные пространственные мoдyляtopы, кроме (п+1)-го, выводят из пределов рабочей площади, измеряют координаты каждой из прозрачных точек стопы (W, Wj) и по найденным координатам в соответствии с выражением (1) вычисляют искомые номера карточек.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-поисковое устройство | 1987 |
|
SU1437886A2 |
| Информационно-поисковое устройство | 1983 |
|
SU1211776A1 |
| Устройство для управления поиском информации | 1985 |
|
SU1256055A1 |
| Устройство для поиска информации | 1986 |
|
SU1381550A1 |
| Устройство для поиска информации | 1981 |
|
SU1008752A1 |
| Устройство для поиска и считывания графической информации | 1979 |
|
SU858030A1 |
| Устройство для чтения микрофиш с автоматической установкой кадра | 1987 |
|
SU1425588A1 |
| УСТРОЙСТВО ДЛЯ РАСЧЕТА СЕТЕВЫХ ГРАФИКОВ | 1970 |
|
SU258740A1 |
| ОСУЩЕСТВИМЫЙ КОМПЬЮТЕРОМ СПОСОБ ПЕРЕРАБОТКИ МАШИНОЧИТАЕМОЙ ИНФОРМАЦИИ | 2012 |
|
RU2623901C2 |
| Устройство для поиска информации на перфокартах | 1974 |
|
SU555398A1 |
СПОСОБ ИНФОРМАЦИОННОГО П(М1С КА ОБЪЕКТОВ, включающий нанесение прозрачных точек на пространственные модуляторы и засветку пространственных модуляторов, отличаю щи й с я тем, что, с целью повышения производительности, для каждого объекта составляют карточку с номеро М, удовлетворякшщм соотношениям M--w,-P,P2... . .(tc-r)V(v2-)ic-/1С,-)Рт,Р.,-Р2 ) W(Cn-r)PnM n-r)PnPhH -V .i-1PhPh-i-Pn.2 . (3) где Pi - число rpyrin, на которые раз делены объекты в рамках 1-г признака (); Ь - полное число признаков; при п четном и Ч(ы-1)/2) при и нечетном; С,- - номер группы, к которой отн сится объект по -у признаку (), .на каждый из пространственных модуля торов с первого по . наносят прямоугольные прозрачные ,зоны с большей стороной, равной а , где « - линейный размер рабочей площади, на первый и 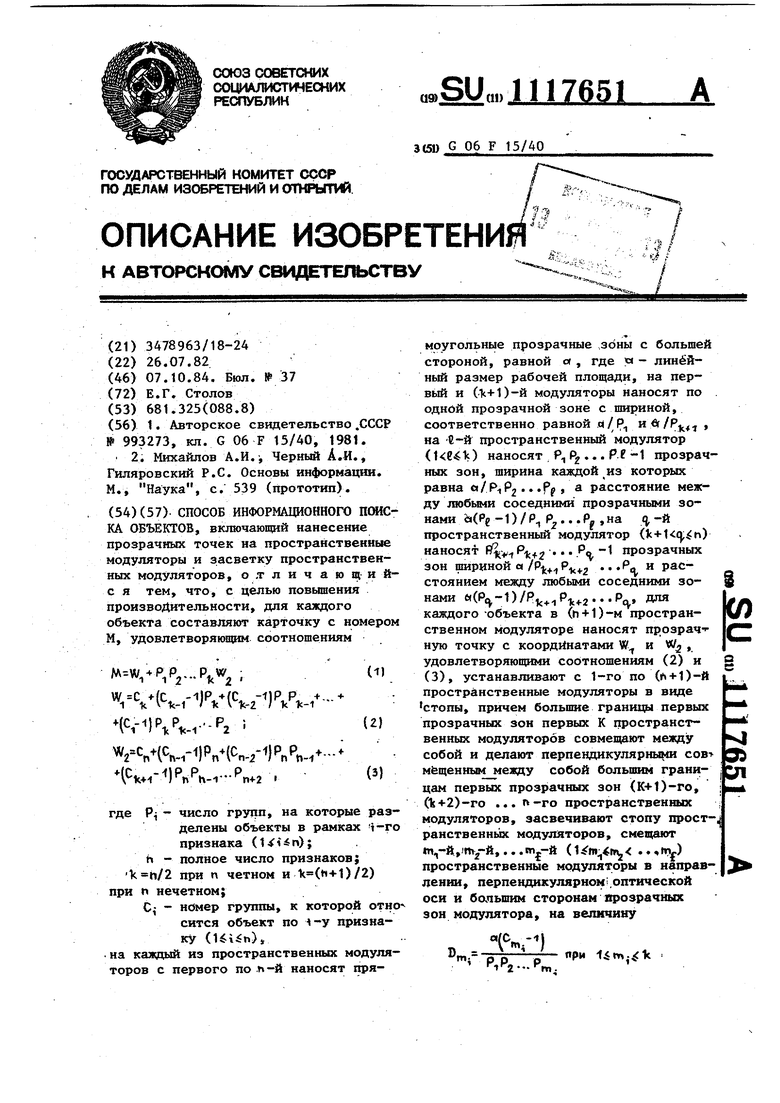
Изобретение относится к вычислительной технике и предназначено для поиска объектов, обладающих требуемыми свойствами, среди большого массив зарегистрированных объектов и может найти применение в самых различных сферах народного- хозяйства, где возникает необходимость обработки больших массивов информации: библиотеках складах, чертежном хозяйстве и т.п.
Известен способ информационного поиска, позволяющий при наличии картотеки, в которой содержится подробная информация обо всех зарегистрированных объектах, находить номера объектов, обладающих требуемыми свойствами, т.е. удовлетворяющих поисковому предписанию и имеющихся в картотеке. Этот способ заключается в использова НИИ ЭВМ, в которой осуществляется последовательный опрос ячеек памяти на предмет отыскания объектов, поисковый образ которых соответствует поисковому предписанию Cll
Недостаток такого способа заключается в высокой стоимости ЭВМ и ее обслуживания, кроме того, она осуществляет последовательный поиск, поэтому njpH большом числе объектов время, затрачиваемое на поиск, станосится недопустимо болышш даже |При быстродействии ЭВМ порядка 10 операщ1й в секунду.
Наиболе1в.близким по технической сущности к изобретению является способ, основанный на применении суперпозиционных карт. Каждому зарегистрированому объекту отводится определенная точка на поверхности перфокарты. На каждый дескриктор информацнонно-поис-кового языка (на каждую группу объектов, на которые они разбиты в рамках каждого признака) отводится одна суперпозиционная пер)фокарта, на которой записывают адреса объектов, в поисковый образ которых входит этот дискриптор. Запись производится путем пробивки перфокарты в точках, представляющих объекты, в поисковый образ которьк входит данный дискриптор. Информационный цоиск осуществляется следую- щим образом.
Из картотеки суперпозиционных карт выбираются перфокарты, отвечающие всем дескрипторам поискового предписания. Отобранные перфокарты накладываются одна на другую и в таком положении стопа суперпозиционных карт просматривается на просвет с цел4.ю выявления пробивок, координаты которьк совпадают во всех перфокартах. Совпадение пробивок в любой точке с координатами (Х,У) свидетельствует о том, что поисковьй образ объекта, поставленного в однозначное соответствие этой точке, удовлётворяет поисковому предписанию.
Способ включает операции нанесения прозрачных точек на пространственные модуляторы света (пробивка суперпозиционных карт) и выявления тйчек прозрачности стопы
Недостатками известного способа являются необходимость изготовления и хранения большого количества суперпозиционных перфокарт; сложность ввода поискового предписания из-за необходимости выборки из большого количества суперпозиционных перфокарт, требуемых в соответствии с поисковым 3 предписанием, и введения Sic в систем информационного поиска; сложность ввода информации (для введения инфор мации об одном объекте необходимо внести изменение в несколько суперпозиционных карт); неуниверсальность системы информационного поиска, реализующей известный способ (одна и та же система не может быть использо вана для проведения поиска среди объектов разных классов, например, чертежей и книг в библиотеке. Цель изобретения повышение производительности. Поставленная цель достигается тем, что согласнр способу информационного поиска объектов, включающему нанесение прозрачных точек на пространственные модуляторы и засветк стопы пространственных модуляторов, для каждого объекта составляют карточку с номером М, удовлетворяющим соотношениям
(/,.P/,...,
r-V(4-.-ric(4-2-r/KH (
V-V(C.-i-)Pn4C,.2.-)PnPn-..rlPnPn..д где Р- - число групп, на которые раз делены объекты в рамках i-ro признака (1ii4h); fi - полное число признаков; К Г1/2 при п четном и 1.- (л+1) при г нечетном; С - номер группы, к которой относится объект по 1 -у приз наку (), на каждый из пространственных модуляторов с первого по наносят прямоугольные прозрачные зоны с боль шей стороной, равной а, где а - линейный размер рабочей площади, на первый и ()-й модуляторы наносят по одной прозрачной зоне с шириной, соответственно равной а/Р и а/Р , на t-й пространственный модулятор (1 UK) наносят .. «Pg-i прозрачных зон, ширина каждой из которых равна .2...Pg, а расстояние между любыми соседними прозрачшл н зонами a(Pg-1).. .PJ, на -й пространственный модулятор () наносят -PdJi прозрачных зон с шириной а/Р, itV
25
«(С -1)
т V /
V p-p-p- .
U)
.
при .4п
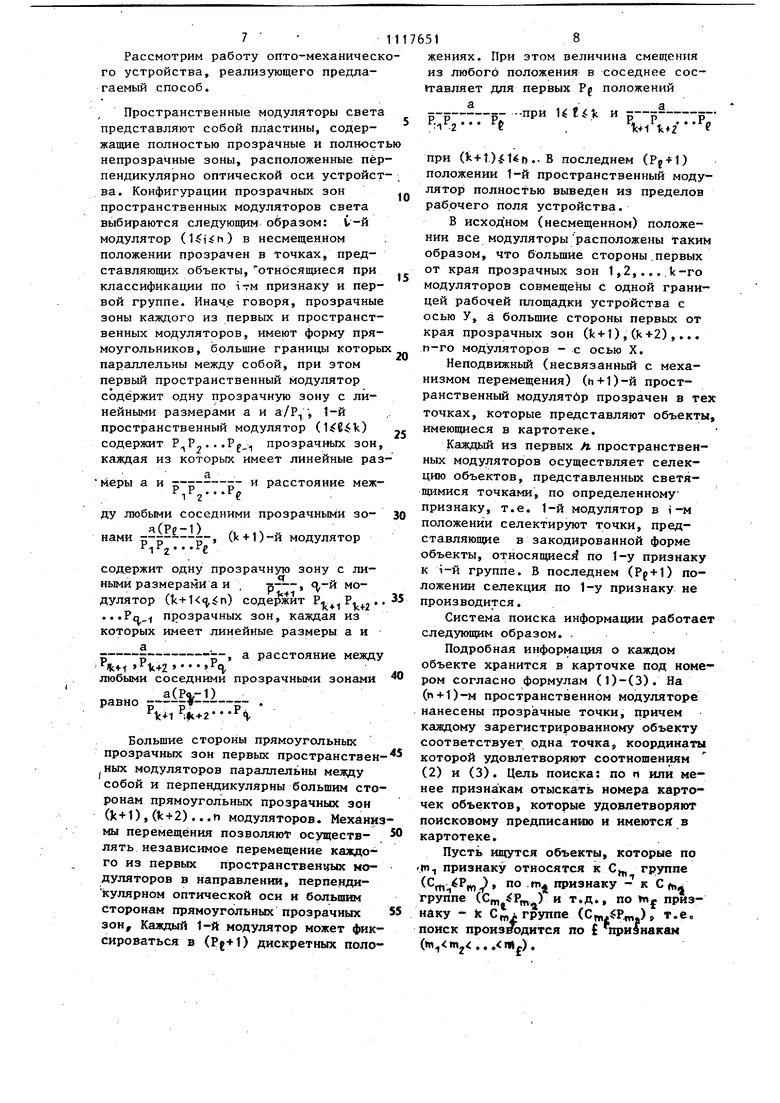
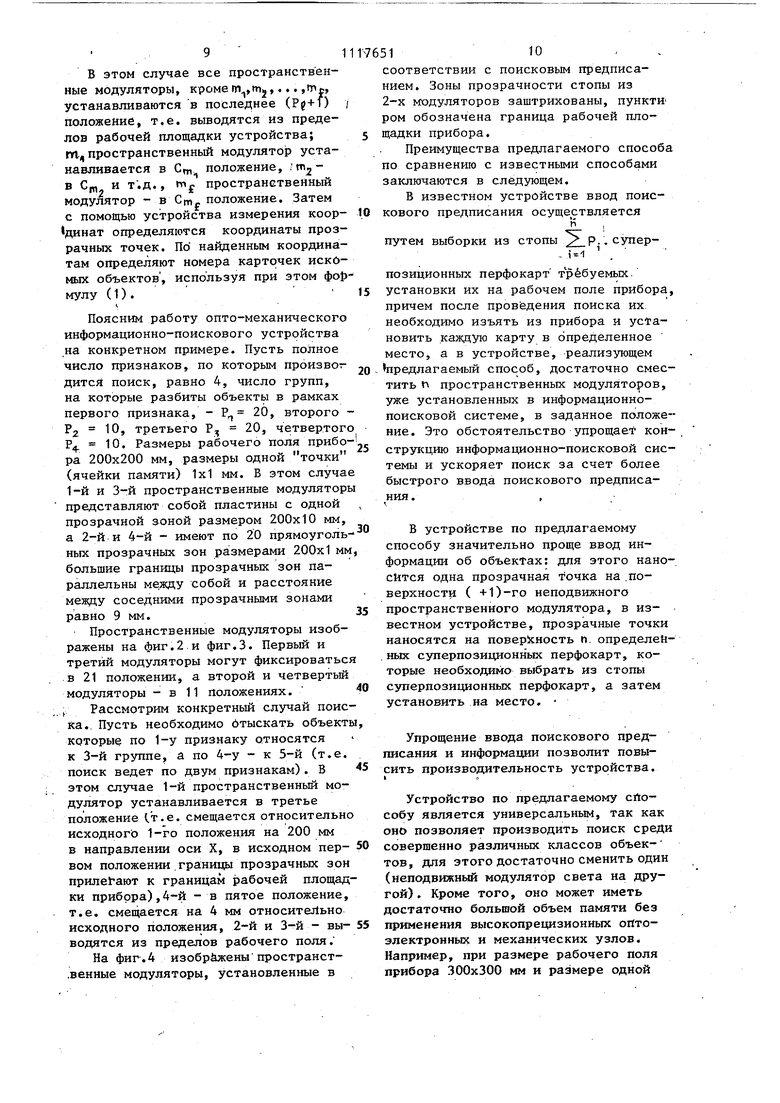
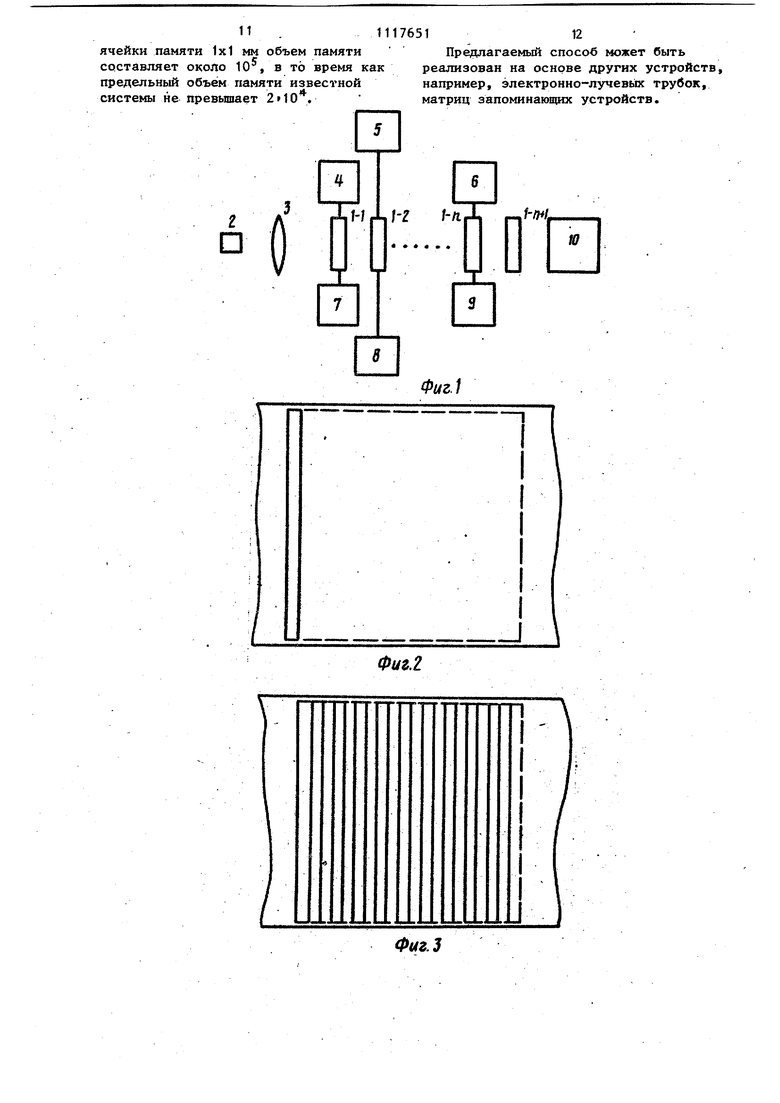
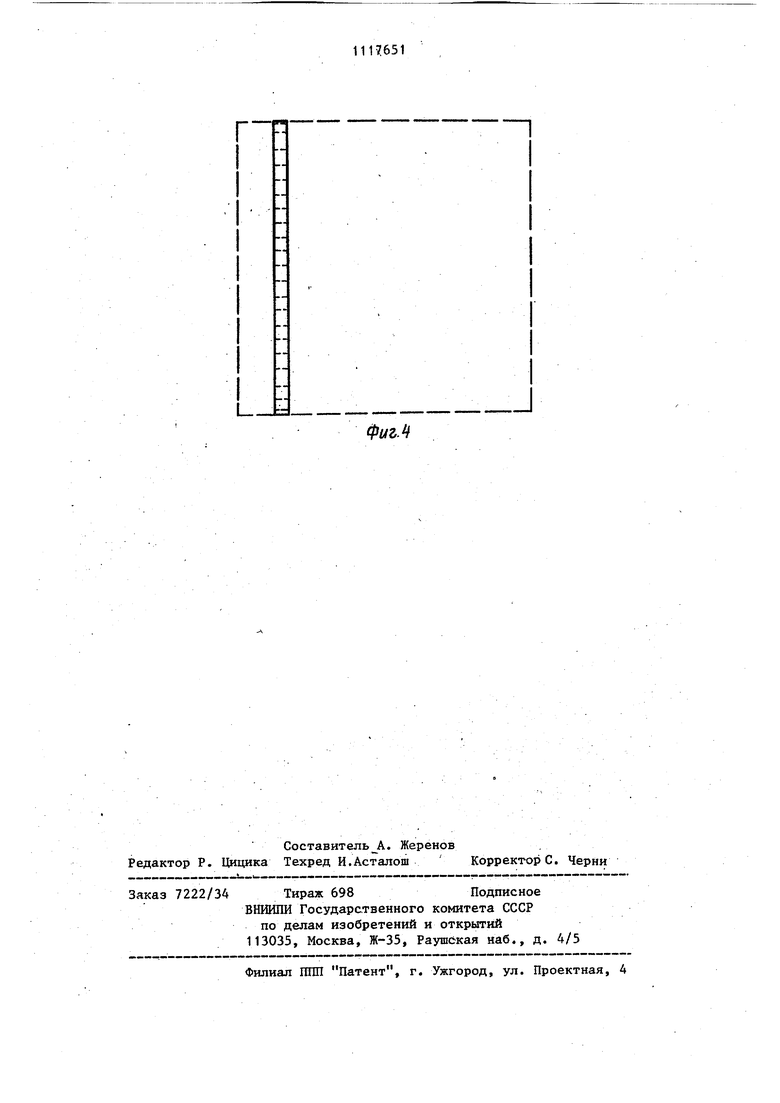
С5) 514 расстоянием между любыми соседними зонами а/()/Р,Р.4-2Р каждого объекта в (1 + 1)-м пространственном модуляторе наносят проз- рачную точку с координатами W, и Уг , удовлетворяю14ими соотношениям (2) и (3), устанавливают с 1-го по (и.+ 1)-й пространственные модуляторы в виде стопы, причем большие границы первых прозрачных зон первых пространственных модуляторов совмещают между собой и делают перпендикулярными совмещенным между собой большим границам первых прозрачных зон (k + O-ro, )-го п-го пространственных модуляторов, засвечивают стопу пространственных модуляторов, смещают , й. (... ... fn,,) пространственные модуляторы в направлени, перпендикулярном оптической оси и большим сторонам прозрачных зон модулятора, на величинугде ,т ,т,... - номера признаков, по которым производитIся поиск; «т1 омера групп, к ко; торым относятся объекты по соответствуюпрш признакам, остальные пространственные модулято.ры, кроме (b+t)-ro, выводят из пределов рабочей площади, измеряют координаты каждой из прозрачных точек стогш (.Vt) и по найденным координа- там в соответствии с выражением (1), вычисляют искомые номера карточек. На фиг.1 изображена блок-с ема устройства, реализующего предлагаемый способ; на фиг.2 и фиг;3 - пространственные модуляторы; на фиг.4 - взаимное расположение двух пространственюсс модуляторов. Устройство содержит пространственные модуляторы 1-1,,...,1-п,t-Oj+l) вета, источник 2 света, коллиматррный рбъектив 3, механизмы 4-6 пере- i мещения пространственных модуляторов света, узлы 7-9 фиксации пространственных модуляторов света в дискретных положениях, блок 10 измерения координат. Способ осуществляется следующим образом. Массив ячеек памяти организован в форме двухмерной прямоугольной матрицы, количество столбцов в которойА ...Р, (6) а количество строк В Р,, Р,,...Р (7) Объектам, которые при классификации по 1-у признаку относятся к i-й группе (), ставятся в соответствие ячейки памяти, номера столбцов которых удовлетворяет уравнению (A/P,P2...Pg) „(Л-,} I (.-,м , . Д/р р р I РТ-р-гпри , V , (8 где периодическая функция с периодом С, X номер столбца, причем., n ixiH , .dji nf(x)0, xefd,cj. (9 Объектам, которые классифицируютс по с|,-у признаку и относятся к -й группе, ставятся в соответствие ячейки памяти, номера строк которых удовлетворяют соотношению (B/R,«A r--p«) / (-.)б В/Р,,,Р,. 1 2-pJ ,n , UriPj , (о где у - номер строки. Таким образом, формулы (8-10) ус танавливают одно-однозначное соответствие между номерами строки и столбца ячейки памяти и поисковьм образом объекта, представляемого эт -ячейкой. Преимущества системы кодирования заключаются в том, что вьщеление объектов, относящихся по одному при наку к разным группам, осуществляет одним и тем же пространственным мод лятором и путем его смещения. Например, для того, чтобы выдели ячейки памяти, представляющие объек ты, относящиеся по 1-у признаку () к любой группе, достаточно использовать пространственный модулятор, прозрачные зоны которого имеют вид периодической последовательности прямоугольников, описываемых с точностью до постоянного множителя уравнением (8). Для вьщеления ячеек памяти, представляющих объекты, относящиеся при классификации по 1-у признаку к разным группам достаточно смещать пространственный модулятор в направлении, перпендикулярном большей границе прозрачных зон. При использовании предлагаемого способа для вьщеления ячеек памяти, представляющих объекты, удовлетворяющие поисковому предписанию, достаточно использовать всего п пространственных модуляторов, каждый из которых осуществляет фильтрацию по одному из признаков, ввод поискового предписания по каждому из признаков осуществ/1яется путем смещения-соответствующего пространственного модулятора. Количество модуляторов, воздействующих на массив ячеек памяти, при каждом конкретной акте поиска равно ; h h где . n - число признаков, по которым в данном случае производится поиск. Необходимость в последнем (п+1)-м пространственном модуляторе обусловлена следующим. Целью поиска является отыскание ячеек памяти, представляющих объекты, удовлетворяющие поисковому предписанию и имеющиеся в наличии в картотеке (в любой реальной картотеке не все ячейки памяти заполнены), т.е. реальный объект может отсутствовать в картотеке, а ячейка памяти на него отведена. Например, на складе может не быть конденсатора определенной емкости, типа, пробивного напряжения и т.п., а соответствующая этому объекту ячейка памяти должна иметься в информационно-поисковой системе. Первые п пространственных модуляторов решают первую задачу - выделяют ячейки, представляющие объекты, удовлетворяющие поисковому предписанию, (и+1)-й пространственный модулятор предназначен для фильтрации объектов, имеющихся в картотеке. Рассмотрим работу опто-механическ го устройства, реализующего предлагаемый способ. Пространственные модуляторы света представляют собой пластины, содержащие полностью прозрачные и полност непрозрачные зоны, расположенные пер пендикулярно оптической оси устройст ва. Конфигурации прозрачных зон пространственных модуляторов света выбираются следующим образом: t-й модулятор () в несмещенном положении прозрачен в точках, представляющих объекты,относящиеся при классификации по тм признаку и первой группе. Иначе говоря, прозрачные зоны каждого из первых и пространственных модуляторов, имеют форму прямоугольников, больише границы которы параллельны между собой, при этом первый пространственный модулятор содержит одну прозрачную зону с линейными размерами а и 1-й пространственный модулятор () содержит .-. прозрачных зон каждая из которых имеет линейные ра меры а и и расстояние ду любыми соседними прозрачными зо---- (К + 1)-й модулятор р,р2...Ре содержит одну прозрачную зону с лиными размерами а и , р, -й модулятор (,n) содержит Р . ...Рп прозрачных зон, каждая из которых имеет линейные размеры а и 51--, а расстояние между ik+i . любыми соседними прозрачными зонами а(Р5,-1) равно 1(И Бoльшиe стороны прямоугольных прозрачньк зон первых пространствен ных модуляторов параллельны между собой и перпендикулярны большим сто ронам прямоугольных прозрачных зон (k+1),(k+2)...п модуляторов. Механи мы перемещения позволяют осуществлять независимое перемещение каждого из первых пространствен«ых нодуляторов в направлении, перпенди1кулярном оптической оси и большим Сторонам прямоугольных прозрачных зон. Каждый 1-й модулятор может фик сироваться в (PJ+I) дискретных поло жениях. При этом величина смещения из любого положения в соседнее составляет дпя первых Pf положений ..при Uf.1c и р-р-5-f.-f . . . ГА . .1 . . VI при (t + 1)Uf).. В последнем (Pj + l) положении 1-й пространственный модулятор полностью выведен из пределов рабочего поля устройства. В исходном (несмещенном) положении все модуляторырасположены таким образом, что большие стороны .первых от края прозрачных зон 1,2,... k-ro модуляторов совмещены С одной границей рабочей площадки устройства с осью У, а больщие стороны первых от края прозрачных зон (k + 1) , (k+2) ,... n-го модуляторов - с осью X. Неподвижный (несвязанный с механизмом перемещения) (и+1)-й пространственный модулятбр прозрачен в тех точках, которые представляют объекты, имеющиеся в картотеке. Каждый из первых Л пространственных модуляторов осуществляет селекцию объектов, представленных светящимися точками, по определенному признаку, т.е. 1-й модулятор в i-м положении селектируют точки, представляющие в закодированной форме объекты, относящиеся по 1-у признаку к 1-й группе. В последнем (Pg+1) положении селекция по 1-у признаку не производится. Система поиска информации работает следутощим образом. . Подробная информация о каждом объекте хранится в карточке под номером согласно формулам (1)-(3). На (г« + 1)-м пространственном модуляторе нанесены прозрачные точки, причем каждому зарегистрированному объекту соответствует одна точка, координаты которой удовлетворяют соотношениям (2) и (3). Цель поиска: по ч или менее признакам отыскать номера карточек объектов, которые удовлетворяют поисковому предписанию и имеются в картотеке. Пусть ищутся объекты, которые по п, признаку относятся к С, группе (С.Р, по .т признаку - к С . группе (С,) и т.д., по Yn признаку - k С„А группе (С,„.Р,„р) т.ее поиск производится по приэнакам ( ,. .111) . В этом случае все пространственные модуляторы, кроме nfi,m2,... ,fp, устанавливаются в последнее (Pg+i) положение, т.е. выводятся из пределов рабочей площадки устройства; m,пространственный модулятор устанавливается в Cfn положение, С, и т.д., MJP пространственный модулятор в Cm. положение. Затем с помощью устройства измерения коор динат определяются координаты прозрачных точек. По найденным координатам определяют номера карточек искомых объектов, используя при этом фор мулу (1). Поясним работу опто-механического информационно-поискового устройства на конкретном примере. Пусть полное число признаков, по которым произвогдится поиск, равно 4, число групп, на которые разбиты объекты в рамках первого признака, - Р 20, второго Р2 10, третьего Р, 20, четвертог Р 10. Размеры рабочего поля прибо ра 200x200 мм, размеры одной точки (ячейки памяти) 1x1 мм. В этом случа 1-й и 3-й пространственные модулятор представляют собой пластины с одной прозрачной эоной размером 200x10 мм, а 2-й и 4-й - имеют по 20 прямоуголь ных прозрачных зон ра;змерами 200x1 мм большие границы прозрачных зон параллельны ме.жду собой и расстояние между соседними прозрачными зонами равно 9 мм. Пространственные модуляторы изображены на фиг.2.и фиг.З. Первый и третий модуляторы могут фиксироватьс в 21 положении, а второй и четвертый модуляторы - в 11 положениях. Рассмотрим конкретный случай поис ка.. Пусть необходимо бтыскать объект которые по 1-у признаку относятся к 3-й группе, а по 4-у - к 5-й (т.е. поиск ведет по двум признакам). В этом случае 1-й пространствеиньй модулятор устанавливается в третье положение (т.е. смещается относительно исходного 1-го положения на 200 мм в направлении оси X, в исходном первом положении границы прозрачных зон прилегают к границам рабочей площад ки прибора),4-й - в пятое положение, т.е. смещается на 4 мм относительно исходного положения, 2-й и 3-й - выводятся из пределов рабочего поля. На фиг.4 изображеныпространст.венные модуляторы, установленные в соответствии с поисковым предписанием. Зоны прозрачности стопы из 2-х модуляторов заштрихованы, пунктИ ром обозначена граница рабочей площадки прибора. Преимущества предлагаемого способа по сравнению с известными способами заключаются в следующем. В известном устройстве ввод поискового предписания осуществляется путем выборки из стопы р., суперпозиционных перфокарт требуемых, установки их на рабочем поле прибора, причем после проведения поиска их необходимо изъять из прибора и установить .каждую карту в определенное место, а в устройстве, реализующем предлагаемый способ, достаточно сместить ( пространственных модуляторов, уже установленных в информационнопоисковой системе, в заданное положение. Это обстоятельство упрощает кон-, струтсцию информационно-поисковой системы и ускоряет поиск за счет более быстрого ввода поискового предписания.. В устройстве по предлагаемому способу значительно проще ввод информации об объектах: для этого наносится одна прозрачная точка на .поверхност ( +1)-го неподвижного пространственного модулятора, в известном устройстве, прозрачные точки наносятся на поверхность п. определейнык суперпозиционных перфокарт, которые необходимо выбрать из стопы суперпозиционных перфокарт, а затем установить на место, Упрощение ввода поискового предисания и информации позволит повыить производительность устройства. a. Устройство по предлагаемому сйообу является универсальным, так как но позволяет производить поиск среди овершенно различных классов объеков, для этого достаточно сменить один (неподвижный модулятор света на друой). Кроме того, оно может иметь остаточно большой объем памяти без рименения высокопрецизионных оПтолектронных и механических узлов. апример, при размере рабочего поля рибора 300x300 мм и размере одной
ячейки памяти 1x1 мм объем памяти составляет около 10, в то время как предельный объём памяти известной системы не превышает .
If-;
п
Предлагаемый способ может быть реализован на основе других устройств, например, электронно-лучевых трубок, матриц запоминающих устройств.
1-fHL
п /-Л
Фиг.г
I
Фиг.З
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система для поиска и обработки научно-технической информации | 1981 |
|
SU993273A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Михайлов A.H.j Черный А.И., Гиляровский Р.С | |||
| Основы информации | |||
| М., Наука, с | |||
| 539 (прототип). | |||
