закреплена клавиша, и фиксатора, выполненные в виде игольчатых щупов, устанЪвленных в направляющих
1
Изобретение относится к системам информационного поиска и может :найти применение в науке, технике, управлении, делопроизводстве и т.п. а именно там, где имеется необходимость обработки больших объемов информации .
Целью изобретения является повышение быстродействия информационно- поискового устройства.
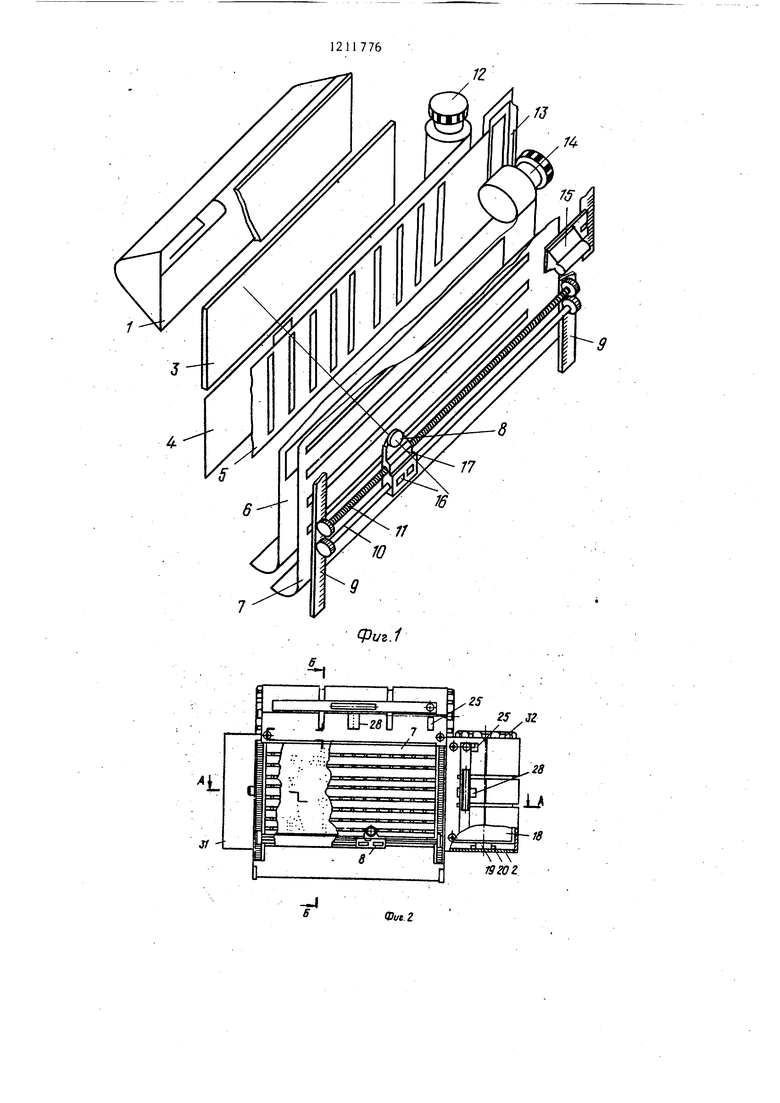
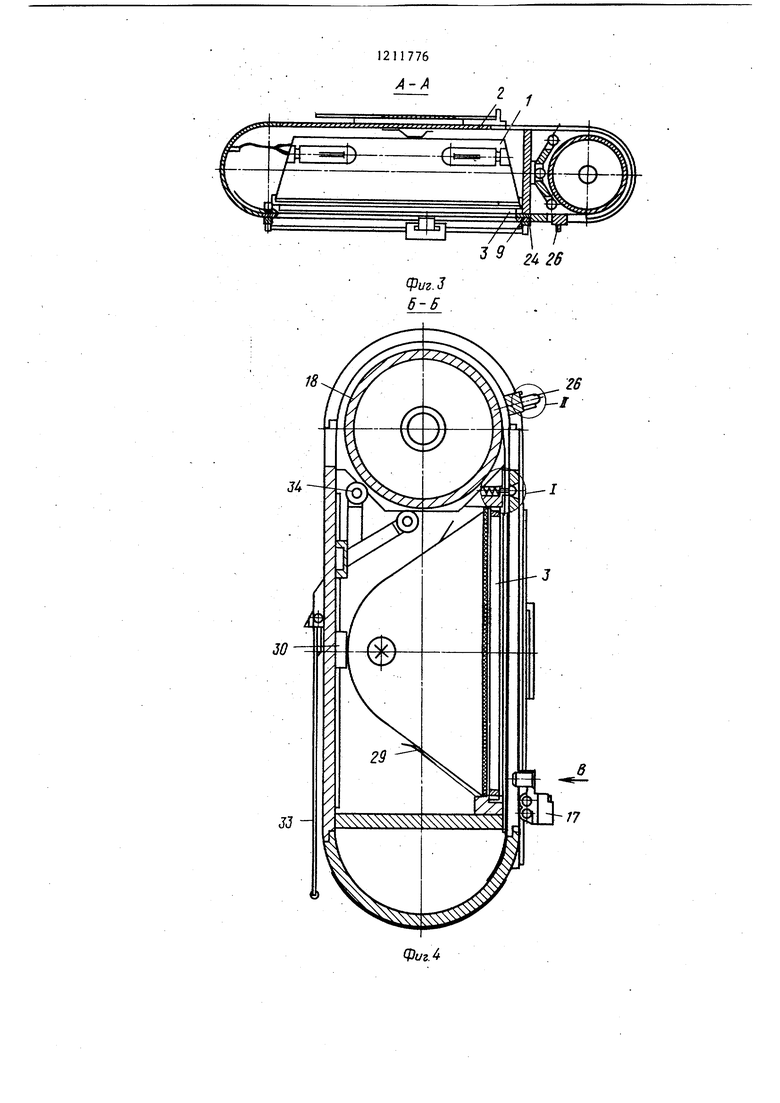
На фиг.1 представлено информационно-поисковое устройство в изо- метрии) для случая, когда поиск . осуществляется по четырем призна- - кам; на фиг.2 - то же, вид спереди; на фиг.З - разрез А-А на фиг.2; на фиг,4 - разрез Б-Б на фиг.2; на у фиг.5 - узел 1 на фиг.4; на фиг,6 - узел Пна фиг.4; на фиг,7 - вид В на фиг.4..
Информационно-поисковое устройство содержит расположенные на одно оптической оси осветитель 1, закрепленный на корпусе 2 устройства, рабочий транспарант 3 и набор масок в виде металлических лент 4-7 с прорезями (показано четыре ленты, поскольку для упрощения конструкции рассматривавтся случай, когда поиск осуществляется по четырем признакам визир 8 с координатным механизмом перемещения визира, включающим вертикальные направляющие 9, установленные перед масками 4-7 и закрепленные на корпусе 2, и горизонтальную направляющую, выполненную в виде двух штанг 10 и 11, установленны на направляющих 9 с возможностью перемещения в вертикальной плоскости рабочего транспаранта 3, кроме то- го, устройство содержит механизм 12-15 перемещения масок ,в вертикальной и горизонтальной плоскостях рабочего транспаранта 3 и механический счетчик 16, который связан с визиром установлен На горизонтальной направляющей 17, которая представляет собой зубчатую рей1211776
с возможностью западания в отверстия шкалы рамки и связанных с клавишей.
ку, {Механизмы 12 и 14 могут быть выполнены одинаково и содержат градуированные вращающиеся барабаны 18 с направляющими (не показаны)
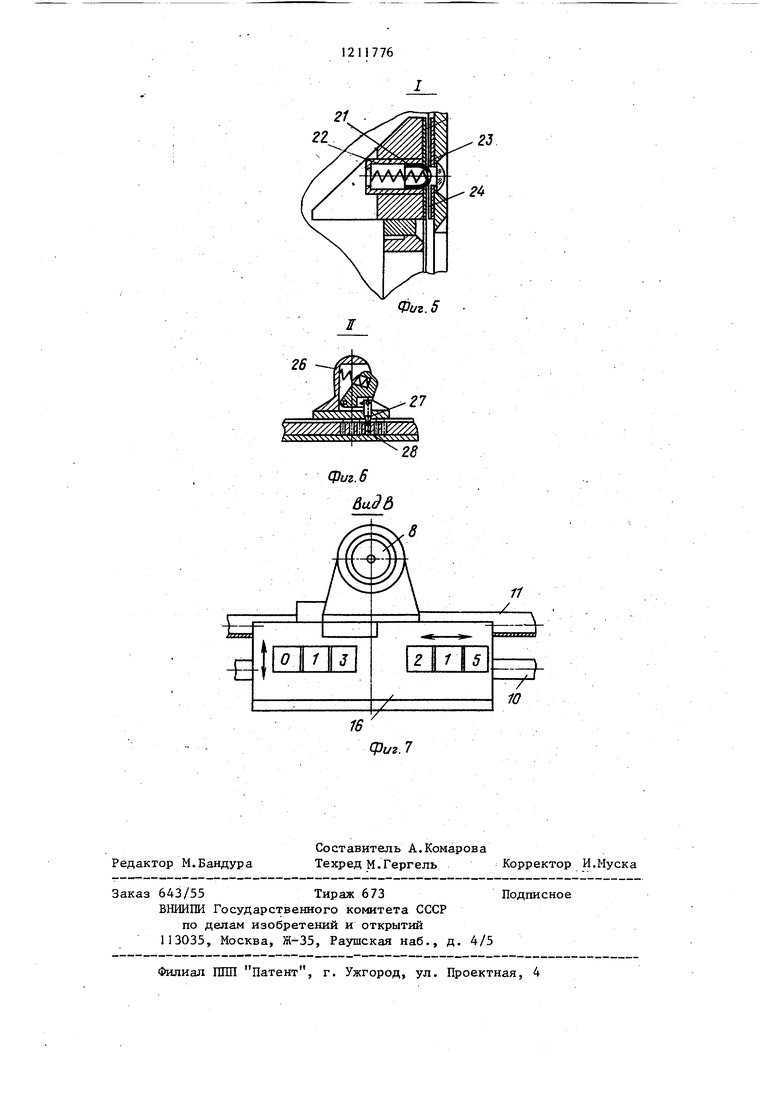
5 j . лент 4 или 6, концы которых жестко закреплены на барабанах 18, оси 19 которых установлены в подшипниках 20, и фиксаторы, выполненные в виде подпружиненных полусфер
О 21 с отверстием в центре, установг ленных в направляющих 22, В периферийной части ленты 6 имеются отверстия 23, входящие в другой механизм, например механизм 13 или 15,
15 которые также выполнены одинаково и содержат рамку 24 для металлической ленты 5 или 7 с нанесенной на ее поверхность шкалой 25, соединенную с рукояткой 26, в которой зак20 реплена клавиша (не показана) и
фиксаторы, выполненные в виде игольчатых щупов 27 с вкладьш1ами с коническими отверстиями 28, выполненными в шкале 25.
5 На чертежах также показаны прут
жины 29 и 30, крышка 31, рукоятки 32, подставка 33, ролики 34.
Принцип кодирования информации,
предпагаем.1й в изобретении, заклю0 чается в следующем. Каждому зарегистрированному объекту ставится в соответствие точка на прямоугольной рабочей площадке устройства,
координаты которой зависят от по- , .искового образа данного объекта.
а ш1еуказанное соответствие устанавливается следующим образом, Объек- там, которые при классификации по первому признаку относятся к перQ группе, соответствуют точки, в которых функция П (Х) равна единице (П (X)- называется периодическая по X функция с периодом С, равная единице в интервале
- и нулю в интервале ), г,е,
.1 /у 1 (1)
п; (Ю
1
3
где а - линейный размер по горизонтали прямоугольной рабочей площадки;
Р; - число градаций в пределах
признака, характеризующего объекты.
Объектам, которые при классификации по первому признаку относятся ко второй группе, соответствуют точки, в которых
nflx-- -).,,
(2)
третьей группе
- ) Г
т.д.,
i-и группе
- П:Ца) ,, „U,,
(3)
(4)
Объектам, которые при классификации по второму признаку относятся к первой группе, ставятся в соответствие те точки, которые удовлетворяют соотношению Ир.рИ . . (5)
о/Р.
ко второй группе а
(а/Р,Р2 а .
|р, - р.7
(6)
и т.д.,
к i-и группе
. --.
и т.д.
Объектам, которые при классификации по Хгму признаку относятся к i-и группе (, где k при
О + I Q четном и k при Q нечетном,
(1 - полное число признаков при классификации зарегистрированных объектов), соответствуют точки, в которых
/a/P.Pz ... Pt) ., ii:l)a),
Рл 1 РЕ
(8)
а,;.р:..,р;/
Объектам, которые при классификации по q-му признаку ) относятся к г-й группе, соответствуют точки на рабочей поверхности приемника.
П7764
координаты которых удовлетворяют соотношению
--ОЪ
Pt4,PK + 2-P
(9)
где b - линейный размер рабочей .площадки по вертикали.
Таким образом, согласно соотно- шениям (2)-(9), каждому зарегистрированному объекту ставится в соответствие определенная точка на рабочей площадке устройства и наоборот каждой .точке рабочей площадки соответствует объект с определенны- . ми свойствами.
Маски .представляют собой ленты- пластины, содержа1Щ1е полностью прозрачные и полностью непрозрачные.
зоны. Они расположены перкендику
лярно оптической оси устройства.
Конфигурации прозрачных зон масок выбираются следующим образом. Первая маска в несмещенном положении
прозрачна в точках рабочей площадки, представляющих объекты, относящиеся при классификации по первому признаку к первой -группе; вторая маска в несмещенном положении прозрачна в точках-, представляющих объекты, относящиеся при классификации по второму признаку к первой группе и т.д. i-я маска в несмещенном положении прозрачна в точках, представляющих объекты, относящиеся при классификации по i-му признаку к первой группе. Следовательно, прозрачные зоны каждой из первых Q масок имеют форму прямоугольников, большие границы которых параллельнь между собой. При этом первая маска содержит одиу прозрачную зону с линейными размерами а и а/Р(, -я маска () содержит Р, Р ... Pj, прозрачных зон, каждая из которых имеет линейные размеры а и а(Р, Р.. е расстояние между любыми соседними прозрачными зонами: а (Р )/, Р ... Pj,, (К+1}-я маска содержит одну прозрачную зону размерами в и Ь/-Р, q-я маска (k cjiQ) содержит Р,, Чч прозрачных зон, каждая из которых имеет линейные размеры b и Ь/Р,... Ра, а расстояние между любыми соседними прозрачными зонами равно а(Ра-1)/Р, Р. . .. Р.. Большие стороны прямоугольных прозрачных зон первых
масок параллельны между собой и пепендикулярны большим сторонам прямоугольных прозрачных зон (k+l) (k+2)... Q масок. Механизмы перемещения масок позволяют осуществлять независимое перемещение каждой из первых J масок в направлении, перпендикулярном оптической оси и большим сторонам прямоугольных прозрачных зон. Каждая 1-я маска (UUQ) может фиксироваться в (Pg +l) дискретных положениях. Каждая из первых Q масок фиксируется в первых Pg положениях таким образом, что величина смещения из положения в соседнее составляет
a/p,pг...)иЬ(p,,,p,,г„,pE(),
В последнем (Рр +) положении €-я маска полностью выведена из пределов рабочей площадки устройства. В исходном (несмещенном) положении все маски расположены таким образо что большие стороны первых .от края прозрачных зон 1,2.,. маски совмещены с одной границей рабочей площадки устройства - с осью Y , а большие стороны первых от края прозрачных зон (k+l), (k+2)...Q-й маски совмещены с осью X.
Рабочий транспарант (несвязанный с механизмом перемещения) (0+)-я маска прозрачен в тех точках, которые представляют объекты, имеющиеся в картотеке. В любо реальной картотеке не все ячейки памяти заполнены, т.е. реальный объект может отсутствовать в картотеке, а ячейка памяти под него оведена.
Например, на складе в данный момент может отсутствовать сопротивление определенного типа, определенного номиналами т.п., а соответствующая этому сопротивлению ячейка памяти в информационно-поисковом устройстве имеется.
Из вьш1еизложенного видно, что каждая из первых Q масок осуществляет селекцию объектов, представленных светящимися точками, по определенному признаку, т.е. t-я маска () в i-ом положении () селектирует точки, представляющие в закодированной форме объекты, относящиеся по -б му признаку к i-й группе. В последнем
(PJ +t) положении поиск по -му признаку не производится.
Работа указанного устройства 5 происходит следующим образом. Подробная информация о каждом объекте хранится в картотеке под соответствующим номером. Цель поиска: по Q или менее признакам отыс0 кать номера карточек объектов, которые, во-первых, удовлетворяют поистсовому предписанию, и, во-вто- рьгх, имеются в картотеке. Пусть ищутся объекты, которые по m ,
5 признаку относятся к группе (), по т,, признаку к С группе ( и т.д. по т признаку к С группе (), т.е. поиск производится по f приз0 накам (пт, т,,,,т). В этом случае все маски, кроме гп ,т, ..,, т, устанавливаются в послед- нее (Pg+lj положение, т.е. выводятся из пределов рабочей штощад5 ки устройства; т, - маска устанавливается в С положение, т маска - в С положение ит.д. т.-вС. положение. Затем с помощью счетчика и визира определяются номера карто0 чек искомых объектов.
Процесс нахождения номеров карточек по светящимся точкам осуществляется путем совмещения перекрестия визира со светящейся точкой и счи- i 5 тывания при этом показания счетчи- ка.
Показание счетчика однозначно оп-; ределяется координатами точки, с которой совмещено перекрестие (при этом координаты точки измеряются в единицах длины, равных протяженности одной ячейки). Связь между покаг занием счетчика и координатами имеет вид
М W, + Р, Р... P,.W
2
(10)
где - координаты точки по горизонтали и вертикали. В некоторых случаях удобно использовать формулу
М W, + Р,Р P.W,,., .. (11)
55 При записи информации об объектах на рабочем транспаранте (определение координат точки, представ- ляющей объект с поисковым образом
71
С,, Cg-.-Co) следует применять формулы
. C,C,;,Mlp,.(c,.,-l)p,p,.,t.,,.
n C,-i)p.pK.,,,.pi(2)
2 Cs-(Ca,,-(pQ.(Cg.2-OpapQ-n-..
.- )pQpQ-,-p.,, Исходя из вьшеизложенного, ясно
. функциональное назначение каждого из элементов устройства: маски осу- ществляют селекцию точек, представляющих объекты, удовлетворяющие поисковому предписанию, рабочий транспарант обеспечивает селекцию точек, представляющих объекты, имеющиеся в картотеке. Осветитель создает равномерную засветку рабочего поля устройства для обеспечения возможности регистрации глазом точек прозрачности стопы масок. Механизмы перемещения и фиксаторы обеспечивают возможность установки масок в требуемое положение в соответствии с поисковым предписанием. Счетчик обеспечивает одно однозначное соответствие между положением перекрестия визира и показанием счет, чика согласно формуле (ю) или (11 ), т.е. при координатах точки, с которой совмещено перекрестие визира- W,, W, показание счетчика определи- . ется соотношением 10 или 11 .
Рабочий транспарант 3 может быть выполнен из пергамента,покрытого лаком и натянутого в металлической рамке.Металлическая рамка вставляется в пазы корпуса 2 устройства ификсируется в требуемом положении при помощи плоских пружи (не показано) .Осветитель 1 состояпр1й
из з еркального отражателя,матового стекла и источника света (лампы) , также устанавливается в корпусе 2 устройства и закрепляется при помощи пружин 29 и 30.Установка ленты 5 и осветителя 1 производится при открытой боковой крьшке 31 корпуса. После установки крьшка закрывается и ее положение фиксируется замком-защелкой. Маски 4-7 изготовлены из пружинной ленты нержавеющей стали толищной 0,25 мм. В
масках 4,6 имеются щели шириной 18 мм, а в масках 5,7 имеются щели шириной 1,. Маски 6 и 5 - вертикального перемещения, а маски 4 и 7 - горизонтального. Передви жение масок производится по направляющим, жестко установленным на корпусе 2 устройства. Маски 6 и 4 од1776
8
ним концом жестко закреплены на вращающихся барабанах 18, которые вращаются в подшипниках.,20, установленных в корпусе 2 устройства. При вращении барабанов,за рукоятки 32 осуществляется передвижение масок. Дпя фиксирования и индикации масок - в требуемом пачожении установлены пружинные фиксаторы с внутренним
подсвечиванием. При установке маски в требуемо е положение полая по- лусфера 21 попадает в отверстие, пробитое в периферийной зоне маски, и свет от осветителя 1, пройдя
сквозь фиксатор, дополнительно .сви- детельствует о правильности установки. Номера положения масок {С,,Сз) считываются по цифровым шкалам на рукоятках 32. Маски 5 и 3 жестко
скреплены с рукоятками 26. При
движении рукояток 26 в направляющих осуществляется перемещение масок 5 и 3 в направляющих, а фиксация осуществляется при помощи игольчатых
щупов 27, входящих в отверстия 28 на шкалах 25. Вывод игольчатого щупа из отверстия дпя дальнейшего перемещения маски осуществляется нажатием клавиши в рукоятке 26.
Считывания координаты положения маски производится через лупу по шкапам 25. Направляющие 17 счетчика I6 крепятся неподвижно к корпусу 2 устройства и представляют собой зубчатую рейку. Трубка, катаясь по направляющим 9,
передает вращение штанге 10, вращение штанги 10 считывается счетчиком 16. Перемещение визира 8 вдоль штанги 11 также считывается счетчи,ком 16. Откидывающаяся подставка 33 служит для установки устройства в наклонном положении, удобном для оператора. Ролики 34 служат для прижима ленты-маски к ведущему барабану, что позволяет перемещать маски относительно рабочего транспаранта с точностью до 0,05 мм. Такая точность дает возможность установить размер регистрирующей
ячейки 1,8x1,8, а при необходимости до 0,8x0,8. Размер ячейки 1,8x1,8 обеспечивает объем памяти 20000 при размере рабочего поля 184x364. Размеры одной ячейки могут
быть уменьшены в три раза без существенного усложнения устройс- |Тва.
/J
1
Фг/г./
31 Л
21 .
21
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-поисковое устройство | 1987 |
|
SU1437886A2 |
| Способ информационного поиска объектов | 1982 |
|
SU1117651A1 |
| Устройство для измерения виброперемещений | 1988 |
|
SU1585667A2 |
| Устройство для управления поиском информации | 1985 |
|
SU1256055A1 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| Устройство для считывания графической информации | 1975 |
|
SU792272A1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИММЕТРИЧНОСТИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2037204C1 |
| Устройство для центрирования изображений | 1989 |
|
SU1647610A1 |
| Устройство для измерения параметров движения объекта | 1987 |
|
SU1511692A1 |
| Устройство для измерения виброперемещений | 1983 |
|
SU1185072A2 |
26
Редактор М.Бандура
Составитель А.Комарова
Техред М.ТергельКорректор И.Муска
Заказ 643/55Тираж 673
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
(puz.7
Подписное
| Воробьев Г.Г | |||
| Иерфокартный метод документального учета в народном хозяйстве | |||
| М.: Экономика, 1967, 0. | |||
| l-iixaunoB А.И | |||
| , Черный А.И | |||
| , Гиляровский Р.С | |||
| Основы информатики | |||
| М.: | |||
| Наука, 1968, с.539. |
