Изобретение относится к электротехнике, в частности к конструкциям нажимных устройств с электронным регулированием нажатия щеткодержателей с перемещающимися щетками. Известно устройство для обеспечения постоянного нажатия щеток на коллектор электрической мащины, включающее в себя корпус щеткодержателя, в котором расположены с возможностью перемещения щетки, амортизаторы, взаимодействующие со щетками, плунжеры, связанные с амортизаторами, направляющий корпус с внутренними сообщающимися полостями, заполненными жидкостью, в которых расположены с возможностью перемещения плунжеры, и нажимной элемент, при этом направляющий корпус связан с корпусом щеткодержателя 1. Недостаток такого устройства - сложная регулировка сил нажатия щеток всех щеткодержателей на коллектор электрической мащины, что обусловлено применением раздельных нажимных устройств для каждой щетки в отдельности. Такое выполнение нажимных устройств ведет к больщому числу регулировочных операций, которое равно числу щеток во всех щеткодержателях электрической машины. Сложность регулировки усугубляется еще тем, что все устройство надо настроить на одну строго заданную оптимальную величину. Наиболее близким к изобретению является устройство для обеспечения постоянного нажатия щеток на коллектор электрической мащины, содержащее корпуса щеткодержателей, в каждом из которых расположены с возможностью перемещения щетки, амортизаторы, взаимодействующие со щетками, плунжеры, связанные с амортизаторами и расположенные с возможностью перемещения в направляющем корпусе во внутренних его сообщающихся полостях, заполненных жидкостью, при этом направляющий корпус связан жестко с корпусом соответствующего щеткодержателя с возможностью отстыковки при замене щеток, узел регулирования нажатия, содержащий корпус, жестко связанный с корпусом одного из щеткодержателей, в корпусе имеется внутренняя полость, частично заполненная жидкостью и сообщающаяся с полостями с жидкостью в направляющем корпусе, в корпусе узла регулирования нажатия расположены порщень с возможностью поступательного перемещения, пружина и регулировочный винт 2. Недостатком данного устройства является сложная регулировка сил нажатия щеток всех щеткодержателей на коллектор электрической мащины, что обусловлено применением изолированных нажимных устройств для каждого щеткодержателя в отдельности. При таких нажимных устройствах для каждой электрической мащины надо провести столько регулировок, сколько щеткодержателей установлено на траверсе (минимум четыре). Регулировки должны быть проведены очень тщательно, так как все нажимные устройства должны быть настроены на одну строго заданную оптимальную силу нажатия. Выполнение нажимной системы в виде совокупности механических элементов с пружиной сжатия приводит к частым регулировкам при эксплуатации электрической мащины за счет изменения физико-механических свойств пружины от нагрева и вибраций, сопровождающих работу щеткодержателей. Регулировка нажимных устройств в процессе эксплуатации мащины весьма сложна по исполнению, так как требует демонтаж направляющего корпуса с корпуса щеткодержателя и установку на регулировочный вибростенд. Цель изобретения - упрощение регулирования сил нажатия щеток всех щеткодержателей на коллектор. Указанная цель достигается тем, что в устройстве для обеспечения постоянного нажатия щеток на коллектор электрической машины, содержащем корпуса щеткодержателей, в каждом из которых расположены с возможностью перемещения щетки, взаимодействующие со щетками амортизаторы, плунжеры, связанные с амортизаторами и расположенные с возможностью перемещения в направляющем корпусе во внутренних его сообщающихся полостях, заполненных жидкостью, при этом направляющий корпус жестко связан с корпусом соответствующего щеткодержателя с возможностью отстыковки при замене щеток, узел регулирования нажатия, содержащий корпус, жестко связанный с корпусом одного из щеткодержателей, в корпусе имеется внутренняя полость, частично заполненная жидкостью и сообщающаяся с полостями с жидкостью в направляющем корпусе, в корпусе узла регулирования нажатия расположены поршень с возможностью поступательного перемещения, пружина регулировочный винт, упомянутое сообщение между полостями с жидкостью узла регулирования нажатия и направляющего корпуса осуществлено с помощью жидкостного коллектора, который выполнен в виде кольцевого трубопровода, прикрепленного к траверсе электрической машины, и связан гибкими рукавами с полостью узла регулирования нажатия и полостями всех направляющих корпусов, узел регулирования нажатия снабжен нажимным элементом, который выполнен из ферромагнитного материала в виде полого сердечника, подвижно расположенного в корпусе этого узла, храповым механизмом, который выполнен в виде зубцов на одной стенке нажимного элемента и защелки, жестко связанной с корпусом узла регулирования нажатия и взаимодействующей с зубцами, узел снабжен также датчиком силы, корпусом которого является нажимной элемент, датчик силы выполнен .магнитоупругим с чувствительным и компенсационным элементами с обмотками возбуждения и измерительными и снабжен обоймой, которая расположена с возможностью частичного перемещения в торцевЬЙ отверстии корпуса нажимного элемента и шарнирно связана с поршнем, внутри обоймы размещены предварительно сжатая упомянутая пружина и дополнительно введенный щток, который с возможностью перемещения взаимодействует с чувствитель ным элементом датчика силы, жестко связанным с корпусом нажимного элемента, при этом компенсационный элемент датчика силы жестко связан с корпусом нажимного элемента и сжат регулировочным винтом, расположенным в отверстии другого торца корпуса нажимного элемента, причем обмотки возбуждения датчика силы включены последовательно-согласно и подключены к дополнительно введенному генератору синусоидального напряжения, а измерительные обмотки датчика силы включены последовательно-встречно и связаны через дополнительно введенные нуль-усилитель и регулятор с дополнительно введенной обмоткой намагничивания, которая связана через регулятор с дополнительно введенным блоком питания и жестко соединена с корпусом узла регулирования нажатия, охватывая его с внещней стороны.
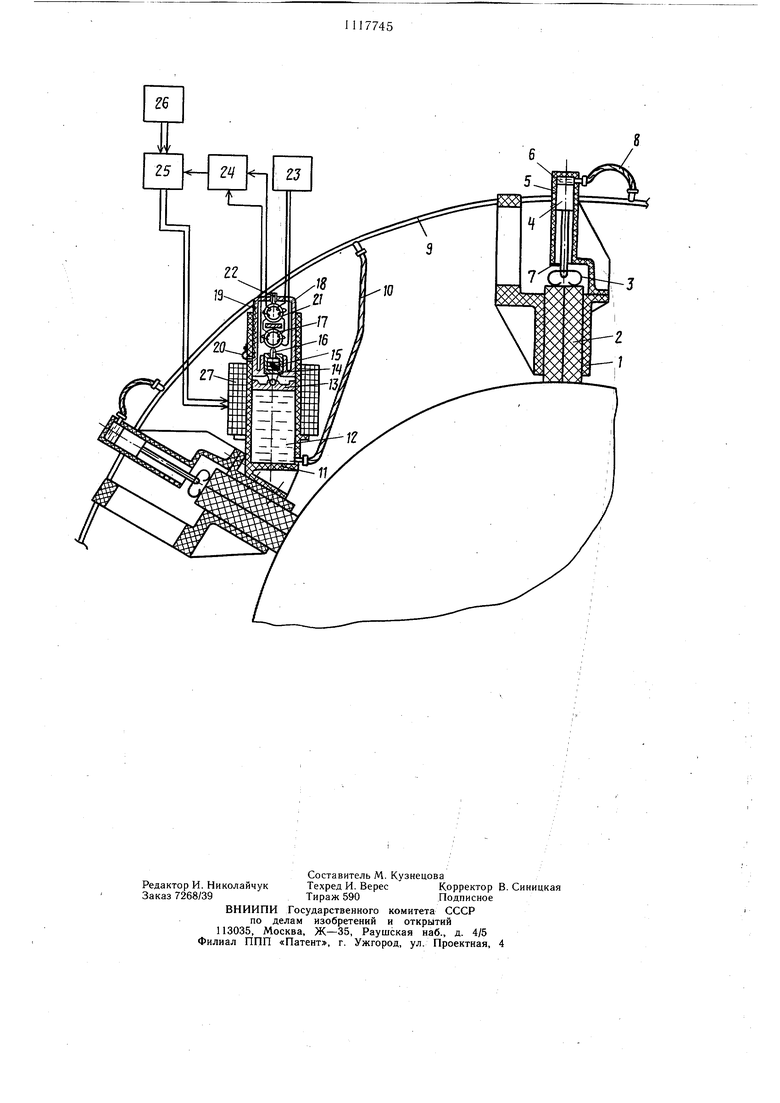
На чертеже схематично показана конструкция предлагаемого, устройства.
Устройство для обеспечения постоянного нажатия щеток на коллектор электрической машины содержит корпуса 1 щеткодержателей, щетки 2,аммортизаторы 3, плунжеры 4, направляющие корпуса 5 с внутренними полостями 6 с жидкостью и ограничителями 7, гибкие рукава 8, жидкостной коллектор 9, гибкий рукав 10, корпус 11 узла регулирования нажатия с внутренней полостью 12, частично заполненной жидкостью, порщень 13, предохранительную обойму 14 с пружиной 15 и штоком 16, чувствительный элемент 17 датчика силы, нажимной элемент 18 узла регулирования нажатия с зубцами 19, зашелку 20, компенсационный элемент 21 датчика силы, регулировочный винт 22, генератор 23 синусоидального напряжения, нуль-усилитель 24, регулятор 25, второй блок 26 питания и обмотку 27 намагничивания.
Щеткодержатели при помощи корпусов 1 крепятся к траверсе электрической машлны-. Корпус 1 каждого щеткодержателя выполнен, например, из термостойкой пластмассы и имеет несколько окон, например три. В окнах корпуса 1 расположены с возможностью перемещения щетки 2, которые выполнены, например, двухэлементными и изготовлены из антифрикционного электропроводящего материала. Щетки 2 находятся в постоянном взаимодействии с амортизаторами 3, которые служат для гашения их колебаний и могут быть выполнены, например, в виде упругого изогнутого коромысла и связань с плунжерами 4, например, при помощи щарниров. Плунжеры 4 обеспечивают передачу давления жидкости на щетки 2 в процессе их износа и выполнены в виде идентичных порщней, жестко связанных со своими штоками. Плунжеры 4 одного щеткодержателя расположены с возможностью перемещения в одном направляющем корпусе 5. Направляющие корпуса 5 в процессе работы жестко связаны с корпусами 1 соответствующих щеткодержателей, например, при помощи двух невыпадающих винтов и одновременно с этим имеют возможность отсоединения от них при замене изнощенных щеток 2 на новые. В направляющем корпусе 5 имеется внутренняя полость 6, которая представляет собой сообщающиеся цилиндрические каналы для плунжеров 4. Внутренние полости 6 заполнены жидкостью и обеспечивают равномерное распределение давления жидкости между плунжерами 4. В качестве жидкости для заполнения внутренних полостей 6 можно использовать, например, трансформаторное масло. Каждый цилиндрический канал внутренних полостей 6 корпусов 5 заканчивается ограничителем 7, служащим для предотвращения взаимодействия амортизатора 3 с коллектором мащина при аварийном разрушении щетки 2 и выполненным любым известным способом, например, в виде пластины. Внутренние полости 6 направляющих корпусов 5 связаны при помощи гибких рукавов 8 с жидкостным коллектором 9. Гибкие рукава 8 обеспечивают свободное перемещение направляющих корпусов 5 при замене изнощенных щеток 2 на новые без нарушения связи с коллектором 9.
Жидкостной коллектор 9 представляет собой кольцевой трубопровод со штуцерами для подсоединения гибких рукавов 8 и с помощью, например, хомутов прикреплен к траверсе электрической машины. Гибкий рукав 10 связывает жидкостной коллектор 9 корпуса 11 с полостью 12 узла регулирования нажатия. Корпус 11 выполнен из термостойкого материала, например пластмассы АГ-4В, с внутренней полостью 12 и жестко связан с корпусом 1 одного из щеткодержателей, например, с помощью винтов. Внутренняя полость 12 корпуса 11 имеет цилиндрическую форму и нижняя ее часть заполнена жидкостью. Внутри полости 12 корпуса 11 с возможностью поступательного перемещения расположен поршень 13, с которым
шарнирно связана обойма 14, внутри которой с возможностью перемещения расположены предохранительная пружина 15 и 16. При этом предохранительная пружина 15 предварительно сжата силой, большей по величине, чем сила давления поршня 13 на жидкость, но меньшей, чем сила, разрушаюш.ая чувствительный элемент 17. Шток 16 выполнен из жесткого материала и взаимодействует с чувствительным элементом 17 магнитоупругого датчика силы, который, в свою.очередь, жестко связан с нажимным элементом 18, выполненным из ферромагнитного материала в виде полого сердечника с двумя отверстиями в торцевых поверхностях (под обойму 14 и регулировочный винт 22) и подвижно расположенным во внутренней полости 12 корпуса 11 узла регулирования нажатия. При этом расстояние между торцом поршня 13 и торцом нажимного элемента 18 составляет зазор до 1 мм, что обеспечивает взаимодействие указанных элементов при сжатии предохранительной пружины 15.
На наружной боковой поверхности нажимного элемента 18 с одной стороны имеются зубцы 19 с которыми взаимодействует защелка 20, расположенная на корпусе 11, жестко одним концом с ним связанная и выполненная в виде листовой изогнутой упругой пластины, изготовленной, например, из стали 65 Г. При этом защелка 20 изогнутой частью выступает за наружнюю поверхность корпуса И, что позволяет захватить ее и вывести из взаимодействия с зубцами 19 для подъема нажимного элемента 18.при замене изношенных щеток 2. Зубцы 19 и защелка 20 образуют храповой механизм. Внутри нажимного элемента 18 расположен и жестко с ним связан .компенсационный элемент 21 магнитоупругого датчика, взаимодействующий с регулировочным винтом 22, который имеет точно такую же форму, что и щток 16 для создания одинаковых внутренних напряжений в элементах 17 и 21 датчика при одинаковых силах давления. Чувствительный 17 и компенсационный 21 элементы магнитоупругого датчика силы выполнены в виде одинаковых колец, например, из магнитомягкого феррита и имеют по одной обмотке возбуждения и измерительной обмотке При этом обмотка возбуждения чувствительного элемента 17 соединена последовательно-согласно с обмоткой возбуждения компенсационного элемента 21 и подключена к генератору 23 синусоидального напряжения. Измерительные обмотки чувствительного 17 и компенсационного 21 элементов, соединены между собой последовательно-встречно и их выходы подключены к входу нуль-усилителя 24, выход которого связан с входом электронного регулятора 25, другой вход которого соединен с блоком 26
питания, выполненным в виде источника постоянного тока, а его выход соединен с обмоткой 27 намагничивания, охватывающей снаружи корпус 11 узла регулирования нажатия и жестко с ним связанной.
Магнитоупругий датчик силы с элементами 17 и 21, блок сравнения в виде нульусилителя 24 и регулятор 25 образуют обратную связь. Компенсационный элемент 21
д сжат регулировочным винтом 22 с силой, равной величине номинальной силы нажатия поршня 13 на жидкость в полости 12, и образует задатчик. При одинаковых величинах сил нажатия на чувствительный 17 и компенсационный 21 элементы магнитоупругого
5 датчика силы на выходе измерительных обмоток возникает одинаковый сигнал вследствие равенства их магнитных проницаемостей.
Устройство работает следующим образом.
В процессе работы электрической машины щетки 2 изнащиваются и уменьшается их высота, в результате этого опускаются амортизаторы 3 вместе с плунжерами 4, что приводит к падению давления жидкости во
5 внутренних полостях 6 направляющих корпусов 5 щеткодержателей и уменьшению силы нажатия на щетки 2. Падение давления жидкости из внутренних полостей 6 направляющих корпусов 5 через гибкие рукава 8, жидкостной коллектор ,9 и гибкий рукав 10 передается во внутреннюю полость 12 корпуса 11 узла регулирования нажатия. Уменьшение давления в полости 12 приводит.к изменению силы нажатия поршня 13 через обойму 12, пружину 15 и шток 16 на чувствительный элемент 17 магнитоупругого датчика силы. В данном случае предохранительная пружина 15 ведет себя как жесткое тело, так как сила нажатия порщня 13 меньше силы ее предварительного сжатия. Отклонение силы нажатия на чувствительный элемент 17 датчика от номинальной величины, т.е. величины нажатия регулировочного винта 22 на компенсационный элемент 21, приводит к изменению магнитной проницаемости элемента 17 по сравнению с эле ментом 21, что вызывает появление и увеличение разностного сигнала на входе нульусилителя 24. Появившийся сигнал с выхода нуль-усилителя 24 подается на один из входов электронного регулятора 25, который в свою очередь регулирует величину постояно ного тока, поступаемого в обмотку. 27 намагничивания от блока питания.
Изменение величины постоянного тока в обмотке 27 намагничивания приводит к изменению электромагнитной силы, действую5 щей на нажимной элемент 18, которая изменяет силу нажатия штока 16 на элемент 17. Последняя, в свою очередь, приводит к повышению давления во внутренней полости 12 и изменению магнитной проницаемости чувствительного элемента 17 датчика силы, которая теперь меньше отличается от проницаемости компенсационного элемента 21. Это приводит к уменьшению разностного сигнала на выходе измерительных обмоток элементов 17 и 21 магнитоупругого датчика. В результате этого уменьшается сигнал на выходе нуль-усилителя 24 и регулятор 25 уменьшает прирашение тока в обмотке 27 намагничивания. Подобное регулирование осуществляется до тех пор, пока магнитные проницаемости чувствительного 17 и компенсационного 21 элементов датчика не станут одинаковыми. Тогда сигнал на выходе нуль-усилителя 24 становится равным нулю и регулятор 25 прекращает изменять ток, поступающий в обмотку 27. При этом сила давления поршня 13 на жидкость во внутренней полости 12 корпуса 11 становится равной номинальной величине. Давление из полости 12 передается через рукав 10, коллектор 9 и рукава 8 во внутренние полости 6 направляющих корпусов 5 щеткодержателей, создавая в них одинаковое удельное давление, которое, в свою очередь, создает одинаковые силы нажатия на плунжеры 4, а следовательно, и на щетки 2, так как передающие элементы 4 и 3 всех щеткодержателей идентичны. Это обеспечивает одинаковые переходные сопротивления между щетками 2 и коллектором электрической машины. Различие величин износа шеток 2 не влияет на распределение силы давления поршня. 13 между плунжерами 4, так как жидкость сво.бодно перетекает в сообшающихся внутренних полостях 6: из полости, где плунжеры 4 подняты, в полость, где плунжеры 4 опущены ниже. При аварийном повыщении давления во внутренних полостях 6 и 12 при отбое щетки 2 от коллектора разрушение чувствительного элемента 17 не происходит. В этом случае усилие нажатия с поршня 13 переходит на нажимной элемент 18, а затем через зубцы 19 и защелку 20 на корпус 11. Такая передача усилия происходит вследствие сжатия предохранительной пружины 15 и утапливания обоймы 14 вовнутрь нажимного элемента 1.8 до тех пор, пока поршень 13 не войдет во взаимодействие с ним. Для замены изношенных щеток 2 необходимо обесточить устройство, отсоединить соответствующий направляющий корпус 5 от корпуса 1 щеткодержателя и вынуть их из окон корпуса 1. Затем в окна корпуса 1 необходимо вставить новые щетки 2 и поднять нажимной элемент 18, для чего необходимо вывести защелку 20 из взаимодействия с зубцами 19 этого элемента. После этого устанавливается направляющий корпус 5 на корпусе 1 щеткодержателя и жестко скрепляется с ним. Описанная конструкция устройства при применении на электрических машинах большой мощности позволяет упростить регулировку по сравнению с известными нажимными устройствами, снизить число регулировок в 36,раз (требуется одна регулировка) и потребность в контрольных датчиках в 6 раз (требуется всего один. Использование электрической системы регулирования позволяет исключить регулировки нажимйого устройства в межремонтный период работы машины, а следовательно, поддерживать переходное сопротивление элементов щетки - коллектор на минимальном уровне, обеспечив экономию электроэнергии. Указанные преимущества устройства позволяют быстро окупить затраты производства на освоение новой продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Щеткодержатель для электрической машины | 1982 |
|
SU1045319A1 |
| Устройство для обеспечения постоянного нажатия щетки на коллектор | 1983 |
|
SU1125685A1 |
| Щеткодержатель для электрических машин | 1982 |
|
SU1051634A1 |
| Токосъемное устройство электрической машины | 1988 |
|
SU1552273A1 |
| Устройство для измерения нажатий щетки на коллектор электрических машин | 1988 |
|
SU1534586A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ЩЕТКИ НА КОЛЛЕКТОР ЭЛЕКТРИЧЕСКИХ МАШИН | 2009 |
|
RU2399999C1 |
| Устройство для измерения нажатий щетки на коллектор электрических машин | 1980 |
|
SU989635A1 |
| Устройство для измерения давления щетки на коллектор электрических машин | 1982 |
|
SU1069040A2 |
| Устройство для измерения нажатия щетки на коллектор электрических машин | 2016 |
|
RU2650673C2 |
| Устройство для измерения нажатия щетки на коллектор электрической машины | 2016 |
|
RU2693013C2 |
УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПОСТОЯННОГО НАЖАТИЯ ЩЕТОК НА КОЛЛЕКТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ, содержащее корпуса щеткодержателей, в каждом из которых расположены с возможностью перемещения щетки, взаимодействующие со щетками амортизаторы, плунжеры, связанные с амортизаторами и расположенные с возможностью перемещения в направляющем корпусе во внутренних его сообщающихся полостях, заполненных жидкостью, при этом направляющий корпус жестко связан с корпусом соответствующего щеткодержателя с возможностью отстыковки при замене щеток, узел регулирования нажатия, содержащий корпус, жестко связанный с корпусом одного из щеткодержателей, в корпусе имеется внутренняя полость, частично заполненная жидкостью и сообщающаяся с полостями с жидкостью в направляющем корпусе, в корпусе узла регулирования нажатия расположены порщень с возможностью поступательного перемещения, пружина -и регулировочный винт, отличающееся тем, что, с целью упрощения регулирования сил нажатия щеток всех щеткодержателей на коллектор, упомянутое сообщение между полостями с жидкостью узла регулирования нажатия и направляющего корпуса осуществлено с помощью жидкостного коллектора, который выполнен в виде кольцевого трубопровода, прикрепленного к траверсе электрической мащины, и связан гибкими рукавами с полостью узла регулирования нажатия и полостями всех направляющих корпусов, узел регулирования нажатия снабжен нажимным элементом, который выполнен из ферромагнитного материала в виде полого сердечника, подвижно расположенного в корпусе этого узла, храповым механизмом, который выполнен в виде зубцов на одной стенке нажимного элемента и защелки, жестко связанной с корпусом узла регулирования нажатия и взаимодействующей с зубцами, узел снабжен также датчиком силы, корпусом которого является нажимной элемент, датчик силы выполнен магнитоупругим с чувствительным и компенсационным элементами с обмотками возбуждения и измерительными и I снабжен обоймой, которая расположена с -возможностью частичного перемещения в торцовом отверстии корпуса нажимногоэлемента и щарнирно связана с порщнем, внут ри обоймы размещены предварительно сжатая упомянутая пружина и дополнительно введенный щток, который с возможностью перемещения взаимодействует с чувствительным элементом датчика сил-ы, жестко связанным с корпусом нажимного элемента, при этом компенсационный элемент датчика СЛ силы жестко связан с корпусом нажимного элемента и сжат регулировочным винтом, расположенным в отверстии другого торца корпуса нажимного элемента, причем обмотки возбуждения датчика силы включены последовательно-согласно и подключены к дополнительно введенному генератору синусоидального напряжения, а измерительные обмотки датчика силы включены последовательно-встречно и связаны через дополнительно введенные нуль-усилитель и регулятор с дополнительно введенной обмоткой намагничивания, которая связана через регулятор с дополнительно введенным блоком питания и жестко соединена с корпусом узла регулирования нажатия, охватывая его с внешней стороны.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Щеткодержатель для электрической машины | 1980 |
|
SU892547A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3439043/24-07, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
