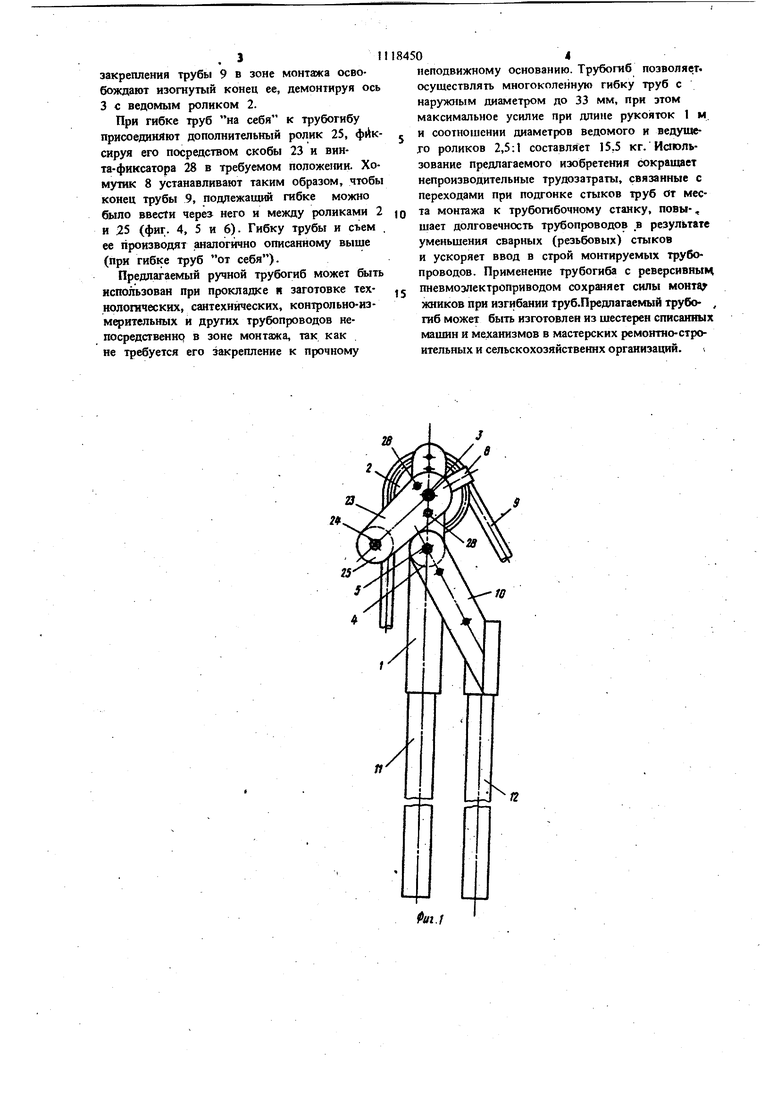
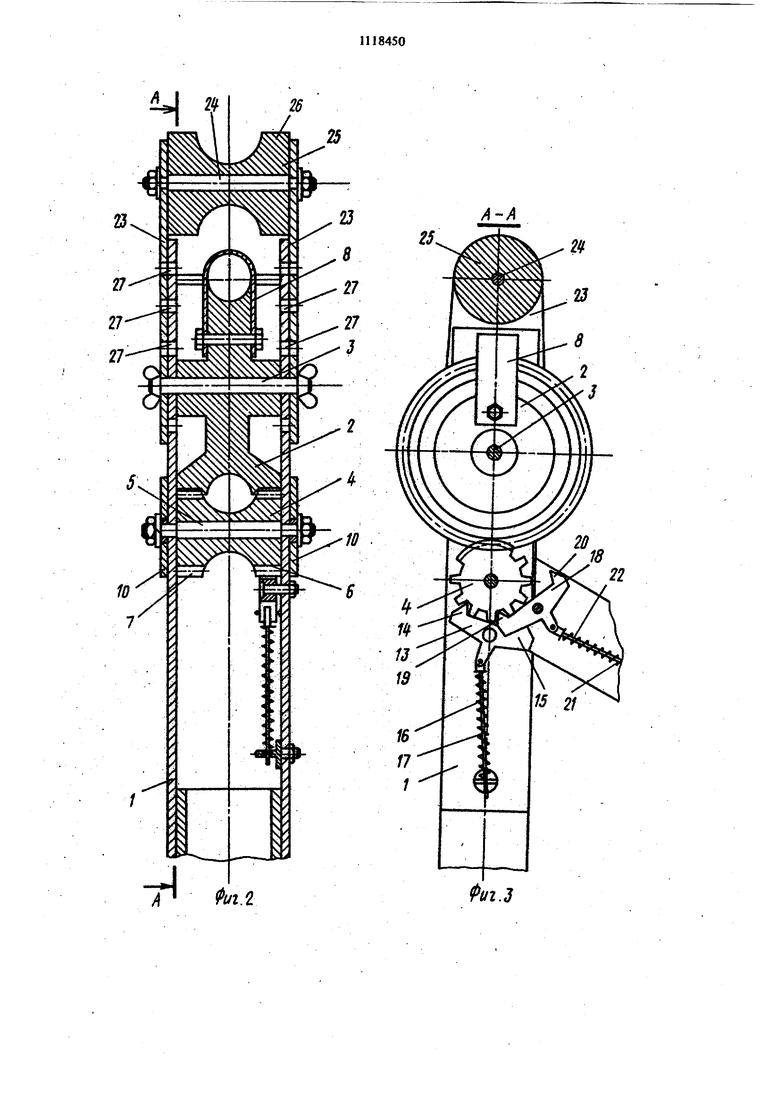
СХ) ta СЛ Изобретение относится к обрабопсе металлов давлением,. в частности, к устройствам для гибки труб, и может быть использовано при прокладке i и изготовлении трубопроводов различного назначения. Известно устройство для гибки труб, содержащее гидроцилнндр с двумя камерами, шток, сменную оправку с пальцем, подвижные опорные ролики, кронигтейн и рукоятки 1. Данное устройство предназначено для гибки труб малого диаметра, требующих небольшого усилия гибки. Наиболее близким к предлагаемому по технической сущности является ручной трубогиб, содержащий пару гибочных роликов с ребордами, уста{1овленных посредством осей в П-образной скобе с рукояткой, и хомут для фиксации .трубы, закрештшный на одном из роликов {2}. Недостатком известного устройства является невозможность многоколенной гибки труб при монтаже трубопроводов непосредственно зоне монтажа, что снижает его технологические воячоядаости. Цель изобретения - расщирение технологических возможностей путем обеспечения миогоколенной гибки труб при монтаже трубопроводов непосредственно в зоне монтажа. Указанная цель достигается тем, что ручной , содержащий пару гибочных роликов с ребордами, установленных посредством осей в П-образной скобе с рукояткой, и хомут для фиксации трубы, закрепленный на одном из роликов, снабжеи двумя дополнительными скобами, каждая из которых смонтирована на одной из осей гибочных роликов с возможностью поворота относительно них, установленным на одной из дополнительных скоб фиксатором ее положения относительно П-образной скобы и роликом с ребордами, рукояткой, смонтированной на второй дополнительной скобе, и двумя подпружиненными стопорными собачками, одна из которых установлена на второй дополнительной скобе, а другая - на П-образной скобе, при зтом, гибочные роЛики связаны между собой и собачками посредством зубьев, выполненньк на ребордах гибочных роликов. На фиг. I схематично изображен трубогиб, общий вид; на фиг. 2 - то же, разрез посредине, вид сбоку; на фиг. 3 - то же, раз рез А-А на фиг. 2; на фиг. 4-8 - возможные схемы гибки. Ручной трубогнб содержит П-образную скоб 1 (основную), являющуюся , основанием для сборки всех его элементов,ведомый гибочиы ролик - щабЛои 2, установлеиный на оси 3, расположенной межиу пластииами скобы 1, ведущий ролик 4, закрепленный на оси 5, также расположенной между пластинами скобы I. Гибочные ролики 2 и 4 выполнены с ребордами 6, по образующим цилиндрической поверхности которых выполнены зубья 7. На части цилиндрической поверхности роликашаблона 2 реборды сточены и установлен хомут 8, служащий для удержания трубы 9 При ее гибке. На оси 5 с возможностью поворота установлены пластины дополнительной скобы 10, размещенные снаружи от пластин П-образной скобы 1 и под углом к ним. Со скобой 1 жесжо связана трубчатая рукоятка 11, а со скобой 10 - трубчатая рукоятка 12. Фиксирующая собачка 13, выполненная с двумя выступами 14 и 15, закреплена на скобе 1 и подпружинена к ней пружиной 16, установленной на стержне 17, также закрепленном на скобе 1. Рабочая собачка 18 выполнена идентично фиксирующей собачке 13 с выступами 19 и 20, закреплена на дополнительНОЙ скобе Ю и подпружинена к последнейпружиной 21, установленной на стержне 22, закрепленном на скобе 10. Дополнительная скоба 23, состоящая из двух пластин, закреплена с возможностью поворота на оси 3. Между пластинами скобы 23 на оси 24 установлен дополнительный ролик 25, выполненный с гладкими ребордами 26. В скобе 23 выполнены отверстия 27 с резьбой, обеспечивающие возможность установки дбполнительиого ролика 25 с помощью винта-фиксатора 28 в требуемое положение. Гибку труб производят следующим образом. При гибке труб от себя трубу 9 устанавливают между ведомым роликом-шаблоном 2 и ведущим роликом 4, пропустив один из концов трубы через хомут 8 (фиг. 7), фиксирующую собачку 13 и рабочую собачку 18 вводят в зацепление с ведущим роликом 4 посредством выступов 14 и 19. Рукояткой 12 выполняют качательные движения, которые обеспечивают поворот ведущего ролика 4 по часовой стрелке, а ведомого ролика-шаблона 2 - против часовой стрелки, в результате чего труба 9 наматывается на ролик-шаблон 2. По достижении заданного угла гиба на трубе 9 нажимают на пружины 16 и 21, устанавливая фиксирующую (стопорную) собачку 13 и рабочую собачку 18 в зацепление с ведущим роликом посредством выступов 15 и 20 соответственно. Выполняя качательные движения рукояткок 12, обеспечивают перемещение ведущего ролика 4 в направлении против часовой стрелки, а ведомого ролика 2 - по часовой стрелке, возвращая ведомый ролик 4 с хомутиком 8 в исходное положение, и извлекают трубу 9. В случае иеподвияшого
.3
закрепления трубы 9 в зоне монтажа освобождают изогнутый конец ее, демонтируя ось 3 с ведомым роликом 2.
При гибка труб на себя к трубогибу присоединяют дополнительный ролик 25, фиксируя его посредством скобы 23 и винта-фиксатора 28 в требуемом положении. Хомутик 8 устанавливают таким образом, чтобы конец трубы 9, подлежащий гибке можно было ввести через него и между роликами 2 и 25 (фиг. 4, 5 и 6). Гнбку трубы и съем . ее производят аналогично описанному вьше (при гибке труб от себя).
Предлагаемый ручной трубогиб может быть использован при прокладке и заготовке технологаческих, сантехнических, контрольно-измерительных и других трубопроводов иепосредсгвеннр в зоне монтажа, так как не требуется его закрепление к прочному
504
неподвижному основанию. Трубогиб позволяет осуществлять многоколейную гибку труб с наруж}сым диаметром до 33 мм, при этом максимальное усилие при длине рукояток 1 м и соотношении диаметров ведомого и ведущего роликов 2,5:1 составляет 15.5 кг. Использование Предлагаемого изобретения сокращает непроизводительные трудозатраты, связанные с переходами при подгонке стыков труб от места монтажа к трубогибочному станку, повы-, шает долговечность трубопроводов в результате уменьщения сварных (резьбовых) стыков и ускоряет ввод в строй монтируемых трубопроводов. Применение трубогиба с реверсивным
пневмоэлектроприводом сохраняет силы монтау жников при изг11бании труб.Предлагаемый трубе- , гиб может быть изготовлен из щестерен списанных машин и механизмов в мастерских ремонтно-строительных и сельскохозяйственнх организаций. 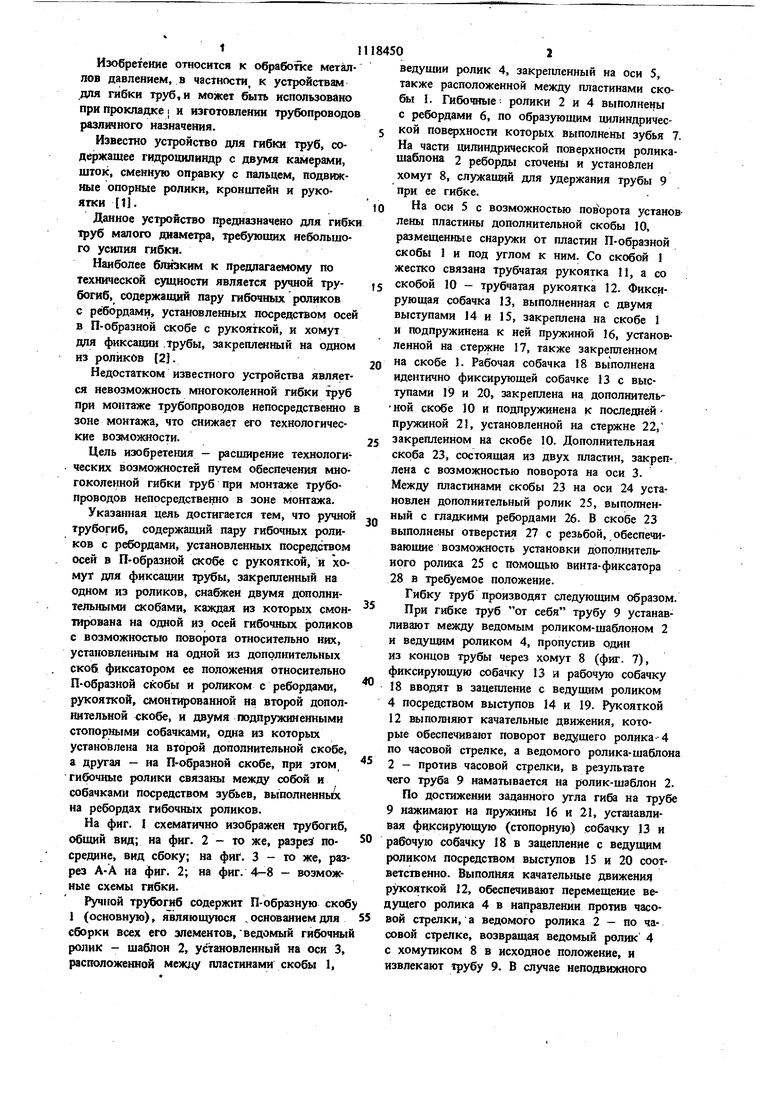
| название | год | авторы | номер документа |
|---|---|---|---|
| НОЖНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 2000 |
|
RU2191081C2 |
| РУЧНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 1995 |
|
RU2084301C1 |
| РУЧНОЙ ТРУБОГИБ | 2012 |
|
RU2521910C1 |
| Трубогиб | 1986 |
|
SU1368064A1 |
| Трубогиб с ручным приводом | 1990 |
|
SU1801662A1 |
| Трубогиб | 1980 |
|
SU940917A1 |
| Трубогиб с ручным приводом | 1986 |
|
SU1424909A1 |
| Переносной трубогиб | 1991 |
|
SU1810168A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Переносной трубогиб | 1978 |
|
SU667281A1 |
РУЧНОЙ ТРУБОГИБ, держащий пару гибочных роликов с ребордами, установленных посредством осей в П-образной скобе с рукояткой, и хомут для фиксации трубы, закрепленный на одном из роликов, о т л и.чающийся тем, что, с целью расширения технологических возможиостей путем обеспечения многоколенной гибки труб при .монтаже трубопроводов, он шабжен двумя дополнительными скобами, каждая из которых смоитироваиа на одной из осей гибочных роликов с возможностью поворота относительно них, установленным на одной из дополни-; тельных скоб фиксатором ее положения относительно П-образной (жобы и роликом с реборами, рукояткой, смонтированной на второй дополнительной скобе, и двумя подпружииенными стопорными собачками, одна из которых установлена на второй дополнительной скобе, а другая - на П-образной скобе, При зтом гибочные ролики связаны между собой и собачками посредством зубьев. Выполненных на ребордах гибочных роликов. г
П
25
Фиг.г
А-А
2i
23
Фыг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU404184A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| И | |||
| Гнутье труб | |||
| М., 1958, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
