4
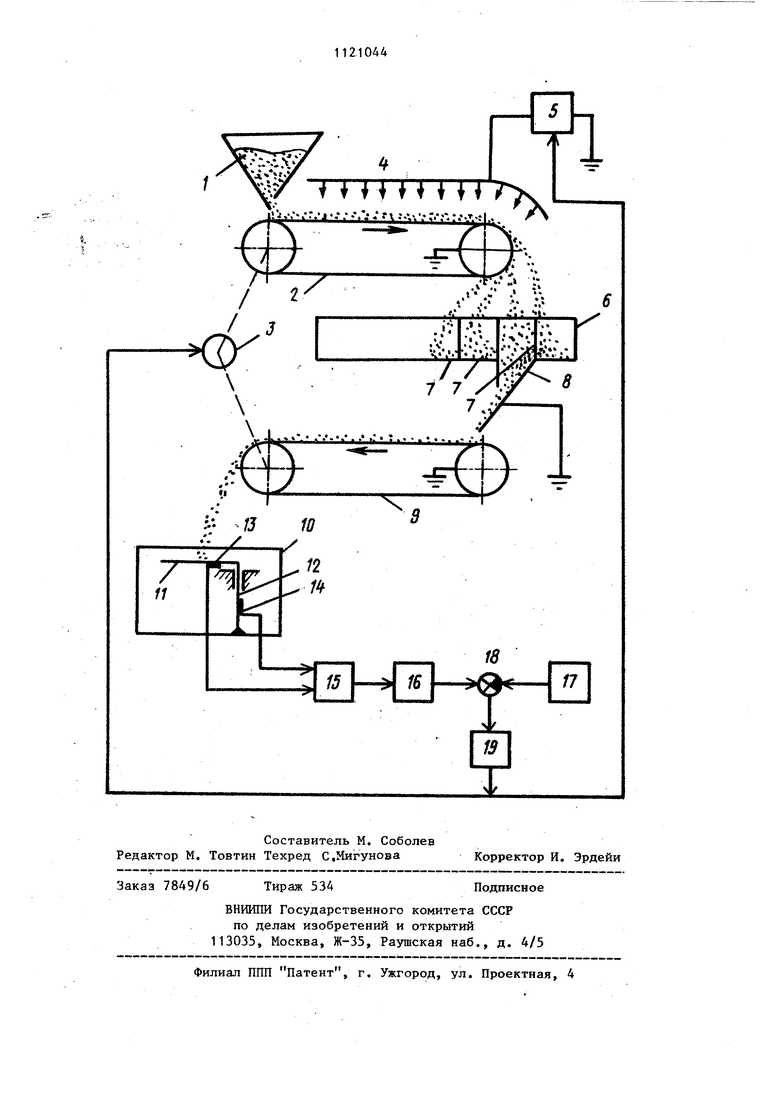
.4; Изобретение относится к способам автоматического регулирования процесса электросепарации сыпучих материалов и может быть использовано в сельском хозяйстве при очистке и сортировке семян. Известен способ управления процес сом электросепарации, предусматривающий воздействие на регулирующие органы электросепаратора по результатам измерения соотношения весов . фракций приемного бункера Cl 3. Данный способ регулирования будет достаточно эффективным, если технологической целью процесса электросепарации будет сортирование частиц по их массе (весу) однако в большинстве случаев этого недостаточно для полного вьщеления первосортных семян Наиболее близким к изобретению по технической сущности и достигаемо му результату является способ автоматического регулирования процесса разделения сыпучих материалов в элект рическом поле, включающий регулирова ние напряженности электрического поля в зависимости от величины сигнала датчика. В этом способе формируют регулирующий сигнал в зависимости от величины давления материала в приемниках на стенку С 2 3. Недостатком данного способа является невозможность измерения всех возмущений, определякяцих характер процесса электросепарации, а также сложный характер зависимостей между контролируемыми возмущениями и управ ляющими воздействиями, что затрудняе регулирование и снижает его эффектив ность. Цель изобретения - повьпвение эффективности регулирования путем согласованного воздействия на матери электрических и механических сил. Указанная цель достигается тем, что согласно способу автоматического регулирования процесса разделения сыпучих материалов в электрическом поле, включающему регулирование напряженности электрического поля в зависимости от величины сигнала датчика одну из вьщеленных фракций разряжают транспортируют к датчику, измеряют среднее значение координаты места попадания частиц и по разности между текущим и постоянно заданным значением координаты попадания формируют регулирующий сигнал. На чертеже приведена схема осуществления предлагаемого способа. Изображенный на схеме электросепаратор содержит подающий бункер 1, выполненный в виде токопроводящей заземленной транспортерной ленты, некоронирующий электрод 2, электродвигатель привода 3, коронирующий электрод 4, подключенный к высоковольтному источнику 5 коронного разряда, и приемный бункер 6 с делительными плоскостями 7. Токопроводящая заземляющая скатная доска 8, кинематически подобное электросепаратору устройство 9, не имеющее электрического поля, приемный бункер 10, чувствительный элемент, образованный упругой пластиной 11, упругим стержнем 12 и тензодатчиками 13, 14, а также блок деления 15,и блок усреднения 16 в совокупности составляют устройство контроля процесса электросепарации. Кроме устройства контроля в состав системы автоматической стабилизации режима работы электросепаратора входит задатчик 17, элемент сравнения 18 и регулятор 19. Способ осуществляется следующим образом. В процессе электросепарации частицы сепарируемого материала попадают в приемный ёункер 6, где в зависимости от координаты попадания разделяются делительнымй плоскостями 7 на отдельные фракции. Таким образом, делительные плоскости 7 фиксируют значение координаты попадания частиц, которое определяется соотношением действующих на частицы электрических и механических сил. Частицы одной из фракций приемного бункера не задерживаются в нем, а проходом попадают на скатную доску 8 и далее на транс портер кинематически подоб-: ного электросепаратору устройства 9. В процессе этого движения из-за контакта с электропроводящей заземленной скатной доской 8 происходит снятие остаточного заряда и полная разрядка выделенных частиц. Движение этих частиц по транспортеру устройства 9 происходит в тех же условиях, что и при движении в электросепараторе на транспортере некоронирующего электрода 2, однако в устройстве 9 отсутствует электрическое поле коронного разряда и поэтому на частицы действует только механическая составляющая сил, определяющих координату их попадання в приемный бункер электросепаратора (координату отбираемой фракции сепарируемых частиц). Именно механическая составляющая сил, действующих на Частицы в электросепараторе определяет значение координаты попадания выделенных частиц в приемный бункер 10,
Сигнал, соответствующий значению этой координаты, получается следующим образом.
Падающие частицы вызывают упругую деформацию пластины 11 и соответствующее изменение сигнала на выходе темзодатчика 13, причем величина этого сигнала пропорциональна моменту сил, возникающему при соударении частиц с упругой пластиной 11. Одновременно соударение частиц с пластиной 11 вызывает также упругую деформацию стержня 12 и соответствующее изменение измерительного сигнала на выходе тензодатчика 14, причем величина этого сигнала пропорциональна самой силе соударения, так как стержень 12 установлен в вертикальных направляющих, связанных с приемным бункером 10
С выхода блока делителя 15 сигнал поступает на вход блока 16, который производит усреднение измеряемой величины. С выхода блока 16 сигнал поступает на вход элемента сравнения
18.Одновременно на другой вход элемента сравнения 18 с выхода задатчика 17 подается постоянный сигнал заданного значения координаты попадания частиц в приемный бункер 10. Элемент сравнения 18 осуществляет операцию алгебраического вычитания этих сигналов. Разность сигналов блока 16
и задатчика 17 с выхода элемента сравнения 18 поступает на вход регулятора
19,которьш в зависимости от величины и знака разностного, сигнала осуществляет воздействие на регулирующие органы электросепаратора. В данном примере в качестве таких органов показаны высокочастотный источник 5 и электродвигатель привода 3. Тогда в результате изменения напряжения источника 5 коронного разряда или ii3Meнения оборотов двигателя изменение режима работы электросепаратора производит согласование действующих на частицы электрических и механических снп по отношению координаты приемного бункера электросепаратора.
В отличие от известных предлагаемый способ позволяет повысить эффективность регулирования не только при разделении частиц смеси по массе, а в более общем случае разделения по соотношению электрических и механических сил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная электротехнологическая линия для разделения семян | 1983 |
|
SU1250328A1 |
| Способ регулирования процесса электрического обогащения сыпучих смесей | 1988 |
|
SU1629104A1 |
| Устройство контроля качества работы электросепарирующей машины | 1982 |
|
SU1072907A1 |
| УНИВЕРСАЛЬНЫЙ КОРОННЫЙ ЭЛЕКТРОСЕПАРАТОР | 2014 |
|
RU2569392C1 |
| ЭЛЕКТРОКОРОННЫЙ СЕПАРАТОР | 1991 |
|
RU2123390C1 |
| КОРОННЫЙ ЭЛЕКТРОСЕПАРАТОР | 2007 |
|
RU2351399C1 |
| Электрокоронный камерный сепаратор | 1979 |
|
SU879858A1 |
| Электрокоронный сепаратор | 1979 |
|
SU822898A1 |
| СПОСОБ ИЗУЧЕНИЯ КИНЕТИКИ КОРОННОЙ ЭЛЕКТРИЗАЦИИ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2046334C1 |
| Способ сепарации семенной смеси и устройство для его осуществления | 1978 |
|
SU787089A1 |
СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА РАЗДЕЛЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ В ЭЛЕКТРИЧЕСКОМ ПОЛЕ, включающий регулирование напряженности электрического поля в зависимости от величины сигнала датчика, отличающийся тем, что, с целью повьппения эффективности процесса регулирования за счет согласованного воздействия на материал электрических и механических сил, одну из вьщеленных фракций разряжают, транспортируют к датчику, измеряют среднее значение координаты места попадания частиц и по разности между текзгщим и постоянно заданным значением координаты попадания формируют регулирующий сигнал. 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ | 0 |
|
SU404512A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического регулирования процесса разделения сыпучих материалов в электрическом поле | 1978 |
|
SU776642A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
