а вторые входы связаны с выходом второго логического элемента И, выходы седьмого и восьмого ключей соединены с входами второго регистра, выход: которого через блок деления соединен с индикатором, при этом
выход второго цифроаналогового прерб разователя подключен к второй компенсирующей обмотке, расположенной на С-образном магнитопроводе, при этом генератор импульсов подключен к первому,второму, пятому и шестому ключам.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ЦИФРОВОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ТОКА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2176089C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТОВ | 1992 |
|
RU2065569C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА | 1998 |
|
RU2147131C1 |
| Устройство для съема информации с ферромагнитного колеса железнодорожного транспортного средства | 1988 |
|
SU1588617A1 |
| РАСТРОВЫЙ ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2334948C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 2007 |
|
RU2326446C1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| Цифровой измеритель магнитной индукции | 1976 |
|
SU879519A1 |
| Электромагнитный расходомер | 1987 |
|
SU1578481A1 |
| Способ определения индукции магнитного поля в зазоре магнитопровода | 1987 |
|
SU1688211A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛОВЫХ ХАРАКТЕРИСТИК ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ, .содержащее цепь питания электромеханических преобразователей, два датчика, два усилителя, генератор и устройство индикаций, отл и ча ющее с тем, что, с целью повышения точное и расширения диапазона измерения, оно снабжено двумя блоками определения знака, восемью ключами, двумя реверсивными счетчиками, двумя регистрами, двумя цифроаналоговыми преобразователями, двумя триггерами, двумя логическими элементами И, блоком деления, стабшшэированным источником питания, двумя компенсирующими обмотками, резистором и магнитной системой с С-образным магнитопроводом, на полюсе которого установлен постоянный магнит, при этом датчики, выполненные в виде датчиков Холла, помещены первый в воздушном зазоре между статором с комг енсирующей обмоткой и ротором электромеханического преобразователя, а второй воздушном зазоре магнитной системы, образованной С-образным магнитопроводом, резистор включен в цепь питания обмотки возбуждения электромеханического преобразователя, к этому же источнику питания подключен первый цифроаналоговый преобразователь, при этом первый датчик- Холла подкл19чен параллельно резистору, выход первого датчика Холла подключен через первый усилитель к первому блоку определения знака, выходы которого подключены к входу логического элемента И и управляюпр1м входам первого и второго ключей, выходы котоpbtx через первый реверсивный счетчик соединены с первым цифроаналоговым преобразователем и входами третьего г и четвертого ключей, первые, управляющие входы каждого из них соединены (П с выходом первого триггера, а вторые с входы связаны с выходом первого ло.гического элемента И, выходы третьего и четвертого ключей го пинены с вхо§ дами первого регистра, выход первого цифроаналогового преобразователя подключен к первой компенсирующей обмотке, расположенной на магнитопроводе электромеханического преобразователя, ю выход первого регистра соединен с СП входом блока деления, при этом стаби4ib 00 лизированный источник питания соединен с вторым датчиком Холла, выход которого подключен через второй усилитель к второму блоку определения знака, выходы которого подключены к логическому элементу И, и управляющим входам пятого и шестого ключей, выходы которых через второй реверсивный счеТчик соединены с вторым цифроаналоговым преобразователем и входами седьмого и восьмого ключей, один из управляющих входов каждого из них соединен с выходом второго триггера.
Изобретение относится к предезионному приборостроению, а в частности к устройствам для определения силы или момента.
Известны устройства для измерения 5 силовых характеристик, например, балансирные динамометры для измерения вращающегося момента. Отличительной особенностью балансирных динамометров является наличие подвижных (балансир- ных) статоров, связанных с силоизмерительными устройствами, с помощью которых определяется момент l Т.
Недостатками этих устройств являются их низкая точность, особенно f5 при измерении мальпс величин моментов, большая сложность и трудоемкость измерений.
Для производственного контроля используются методики косвенного 20 контроля, основанные на деформации эталонного упругого элемента.
Известно устройство, состоящее из устанавливаемого в цепи.передачи момента тарированного упругого элемента 25 на концах которого установлены измерительные дискр; с метками, равномерно распределенными по периферии дисков. Рядом с дисками устанавливаются неподвижно датчики, выходы которых через 30 усилители подключены к электронной схеме вычисления временного сдвига, включающей генератор, триггер и устройство индикации, который зависит от угла закручивания упругого элемен- -зг
та 23.
Недостатками данного устройства явяются ограниченная точность, опрееляемая гистерезисными явлениями упругого элемента, мальш диапазон из- до ерений, определяемый линейной зоной пругих деформаций упругого элемента и резкое возрастание трудоемкости, змерений в случае получения силовых арактеристик при различных положе- 45
ниях ротора и статора преобразовате ля.
Целью изобретения является повышение точности и расширение диапазона измерения силовых характеристик электромеханических преобразователей.
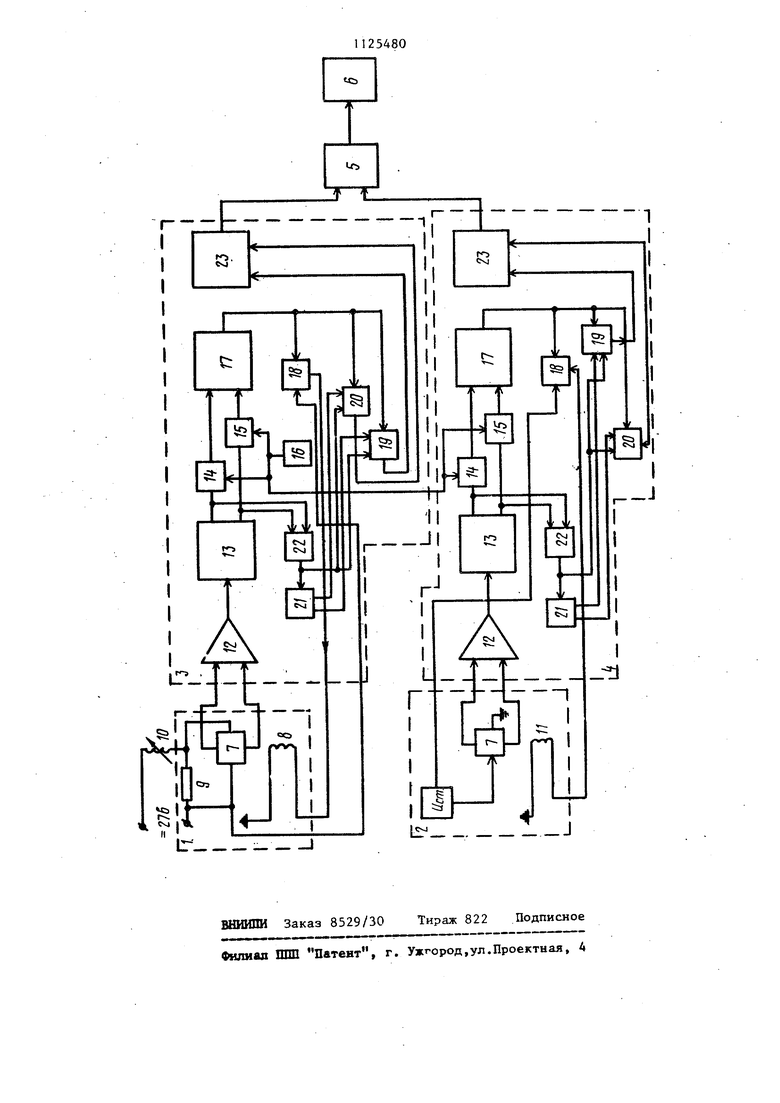
Указанная цель достигается тем, что устройство, содержащее цепь питания электромеханических преобразователей, два датчика, два усилителя, генератор и устройство индикапди, . . снабжено двумя блоками определения знака, восемью ключами, двумя реверсивными счетчиками, двумя регистрами двумя цифроаналоговыми преобразователями, двумя триггерами, двумя логическими элементами И, блоком деления, стабилизированным источником питания, двумя кoмцeнcиpyюци да обмотками, резистором и магнитной системой с С-образным магнитопроводом, на полюсе которого установлен постоянный магнит, при этом датчики,выполне.нные в виде датчиков Холла, помещены первый в рабочем зазоре между статором с компенсирующей обмоткой и ротором электромеханичесвгого преобразователя, а второй в воздушном зазоре магнитной системы, образованной С-образным магнитопроводом, резистор включен в цепь питания обмотки возбуждения электромехакического преобразователя, к этому же источнику питания подключен первый цифроаналоговый преобразователь, первый датчик Холла подключен параллельно резистору, выход первого датчика Холла подключен через первый усилитель к первому блоку определения знака, выходы которого подключены к входу логического элемента И и управляющим входам первого и второго ключей, выходы которых через первый реверсивньш счетчик соединены с первым цифроаналоговым преобразонателем и входами третьего и четвертого ключей первые управляющие входы каждого из них соединены с выходом первого триг гера, а вторые входы связаны с выходом логического элемента И, выходы третьего и четвертого ключей соединены с входами первого регистра, выход первого цифроаналогового преобразователя подключен к первой компенсирующей обмотке, расположенной на магнитопроводе электромеханического преобразователя, вьгход первого регистра соединен с входом блока деления, при .этом стабилизированный источник питания соединен с вторым датчиком Холла, выход которого подключен через второй усилитель к входу блока определения знака, выходы которого подключены к логическому элементу И,- и управляющим входам пятого и шестого ключей, выходы которых через второй реверсивный счетчик соединены с вторым дифроаналоговым преобразователем и входами седьмого и восьмог ключей,, один из управляющих входов каждого из них соединен с выходом второго триггера, а вторые входы свя заны с вьпсодами второго логического элемента И, выходы седьмого и восьмого ключей соединены с входами второго регистра, выход которого через блок деления соединен с индикатором, при этом выход второго цифроаналогового преобразователя подключен к вто рой компенсирующей обмотке, расположенной на С-образном магнитопроводе, при этом генератор импульсов подключен к первому, второму, пятому и шес тому ключам. На чертеже представлена блок-схема предлагаемого устройства. Устройство состоит из двух канало канала измерения Л1У и канала измерения Ли, включающих датчики 1 и 2 информации, устройства 3 и 4 обработ ки полученной информации, ВЫХОДНЬЕХ устройств - блока 5 деления и блока 6 индикации. Датчик информации 1 состоит из датчика 7. Холла, помещенного в воздушном зазоре между статором с компенсационной обмоткой 8 и ротором электромеханического преобразователя и подключенного параллельно резистору 9, соединенному последовательно с обмоткой 10 возбуждения электромеханического преобразователя. Датчик 2 информации состоит из дат чика 7 Холла, помещенного в магнитно поле С-образного сердечника с постоянным магнитом на полюсе и записываемого от стабилизированного источника питания и, а также из компенсационной обмотки 11, расположенной на С-образном сердечнике магнитопровода, который жестко связан с подвижной частью электромеханического преобразователя ,и, следовательно, имеет одинаковые с ним перемещения. Выход каждого датчика 1 и 2 информации поступает на соответствующие устройства 3 и 4 обработки информации. Каждое из устройств обработки информации состоит из операционного усилителя 12, вход которого соединен с выходом датчика 7 Холла, блока 13 определения знака, вход которого соединен с операционным усилителем 12, а выходы подключены к управляющим входам ключей 14 и 15. Другие входы ключей 14 и 15 соединены с генератором 16. Выходы ключей 15 и 14 через реверсивный счетчик 17 соединены с цифроаналоговым преобразователем (ЦАП) 18 и входами ключей 19 и 20,. один из управляющих входов каждого из которых подключен к выходу триггера 21, а вторые входы ключей 19 и 2d - к выходам логического элемента И 22, вход которого соединен с выходами блока 13 определения блока. Логический элемент И 22 обеспечивает выдачу сигнала при поступлении на его входы двух одноименных сигналов. Выходы 1 лючей 19 и 20 соединены с входом регистра 23, выход ЦАП 18 подключен к компенсирующей обмотке 8, расположенной на магнитопроводе электромехацического преобразователя. При этом выход каждого датчика 1 и 2 информации соединен с входами соответствующих операционных усилителей 12 устройств 3 и 4 обработки информации, выходы которых соединены с входами блока 5 деления, выход которого соединен с -блоком 6 индикации. Операционный усилитель 12 обеспечивает усиление входного сигнала по постоянному току и имеет глубокую отрицательную обратную связь. Блок 5 деления - арифметическое устройство, обеспечивающее деление двух величин, поступающих с регистров 23. Регистр 23 - узел, предназначенный для при.ема, временного хранения и выдачи информации одного числа.
; Предлагаемое устройство работает :следукщ1Ш образом. При подаче питания на устройство сигнал с датчика Холла,пр.опорциональ:ный величине накопленной энергии в зазоре электромеханического преобра- зователя поступает на вход первого операдаонного усилителя 12, усиленн1ый сигнал с которого поступает на nepBbui блок 13 определения знака. .Выходной сигнал блока 13 определения знака в зависимости от полярности входного сигнала открывает ключ 14 либо 15 для прохождения иадпуЛьсов с .г|енератора 16 на реверсивгай счетчик :ll7, количество прошедших импульсов пропорционально величине и псодного сигнала с датчика 7 Холла, т.е. пропорционально величине магнитной энер гии, йакопленной в рабочем зазоре исследуемого электромеханического преобразователя, С выхода реверсивного счетчика 17 си.гнал поступает на ЦАП 18, запитанный от источника питания. Выходной сигнал с ЦАП 18 по ступает в компенсационную обмотку 8, намотанйзто на сердечник статора ис:следуемого электромеханического npei о1бразователя. Вызываемый компенсационной обмоткой 8 магнитный поток, противоположньй по направлению магнИнрму потоку статора, компенсирует манитный поток в зазоре. В установив.ажнся режиме, когда магнитный поток компенсационнЬй обмотки 8 равен по величине магнитному потоку, возбуждаеному обмоткой 10, сигнал на выходе операционного усилителя 12 равен нуч лю, а на реверсивном счетчике 17 записьгоается число, равное величине магнитной энергии, накопленной в воз душном зазоре, исследуемого электроменанического преобразователя. При
этом на вход логического элемента И 22 поступают два нулевых сигнала, которые вызывают срабатывание логичекого элемента И 22 и, соответственно срабатывание триггера 21, что приводит к открыванию ключа 20, и накопленная в реверсивном счетчике 17 информация с положительным знаком передается в регистр 23.
При изменении положения подвижной части электрОмахнического преобразователя происходит процесс с той лишь разницей, что при достижении второго установившегося режима открывается ключ 19, что позволяет передать накопленную в реверсивнс : счетчике 17 информацию в регистр 23 с отрицательным знаком. В регистре 23 происходит вычитание двух величин и на выходе появляется сигнал, равный изменению величины магнитной энергии 4№.
Аналогично описанному процессу и одновременно с ним происходит измерение изменения положения координаты- с помощью датчика 7 Холла в канале измерения йО , и на выходе регистра 23 появляется сигнал, равный изменению положения координаты Д,.
Сигналы с регистров 23 dW и & соответственно заводятся в блок 5 деления, на выходе которого сигнал, срответствуандай силовой характеристике электромеханического преобразователя F.5J. который поступает на
Л блок 6 индикации.
Предлагаемое устройство по.зйоляет Производить измерение силовых харак-г теристик в любом заданном относительном положении ротора и статора электромеХанического преобразователя и упрощается процесс измерения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кац С.М | |||
| Балансирные динамометры для измерения вращающегося момента, Госэнергоиздат, 1962 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фролов Л.В | |||
| Измерения крутящего момента | |||
| Энергия, 1967(прототип).i | |||
