Изобретение относится к электротехнике и может быть использовано в следящих системах регулирования.
Известны электроприводы, выполненные на синхронном исполнительном двигателе с пристроенными к нему датчиком положения и датчиком скорости, в частности, в виде синхронного генератора, с электронными преобразователями их сигналов и усилителями мощности [1].
Известны также электроприводы с объединенными цепями входных и выходных сигналов датчиков положения и скорости [2].
Недостатком таких схем является сложность конструкции и разделения сигналов датчиков положения и скорости.
Наиболее близким к предложенному решению является электрический следящий привод, содержащий исполнительный механизм, включающий в себя синхронный двигатель с зубцовым статором, синхронный генератор и датчик положения магнитного потока ротора; электронный блок управления, включающий входной каскад с первым узлом сравнения, предварительный каскад с многофункциональным входом и усилитель мощности; датчик тока каждой фазы синхронного двигателя; основной источник питания; дополнительный источник питания со средним выводом и преобразователь сигналов синхронного генератора, выход которого подключен к первому узлу сравнения, а выход входного каскада связан с первым входом предварительного каскада [3.]
Недостатком указанного электропривода является сложность как конструкции датчика положения и исполнительного механизма в целом, так и схем формирования сигналов датчика положения и скорости вращения, а также усилителя мощности. Кроме того, привод замкнут по скорости и регулировать угловое положение объекта не представляется возможным. Это ограничивает область применения указанного привода.
Технический результат данного предложения заключается в упрощении конструкции исполнительного механизма и электронной схемы привода, а также расширении области применения.
Указанный технический результат достигается тем, что электрический следящий привод, содержащий исполнительный механизм, включающий в себя синхронный двигатель с зубцовым статором, синхронный генератор и датчик положения магнитного потока ротора; электронный блок управления, включающий входной каскад с первым узлом сравнения, предварительный каскад с многофункциональным входом и инициирующий усилитель мощности, питающийся от основного источника постоянного тока; датчик тока каждой фазы синхронного двигателя; дополнительный источник питания со средним выводом и преобразователь сигналов синхронного генератора, выход которого подключен к первому узлу сравнения, а выход входного каскада связан с первым входом предварительного каскада, дополнительно содержит: входное устройство, состоящее из последовательно соединенных пропорционально-дифференцирующего звена, второго узла сравнения и интегро-пропорционального звена; устройство выделения амплитуды входного сигнала предварительного каскада; формирователь знака входного сигнала; переключатель порядка чередования фаз с дополнительным входом; преобразователь выходных сигналов датчиков тока каждой фазы синхронного двигателя; блок контроля сигнала ошибки; датчик тока потребления усилителя мощности и устройство блокировки; механическую передачу с выходным штоком, встроенную в исполнительный механизм; приборный редуктор и связанный с ним датчик положения выходного штока с питающим генератором и преобразователь сигналов датчика положения выходного штока; при этом исполнительный механизм выполнен на базе трехфазного синхронного двигателя, а усилитель мощности выполнен в виде трехфазного мостового инвертора; датчик положения магнитного потока ротора выполнен в виде трех микросхем с датчиками эдс Холла, каждая из микросхем размещена под зубцом одной из фаз трехфазной обмотки синхронного генератора; обмотки синхронного генератора размещены на трех соседних зубцах, свободных от обмоток трехфазного синхронного двигателя, и соединены на звезду, общая точка которых подключена к среднему выводу дополнительного источника питания; преобразователь сигналов синхронного генератора выполнен на электронных ключах, входы которых через резисторы подключены к выходу синхронного генератора, выходы электронных ключей объединены и образуют выход преобразователя сигналов синхронного генератора, а управляющие цепи электронных ключей подсоединены к выходу соответствующих микросхем датчика положения магнитного потока ротора; причем выход входного устройства подключен ко входу входного каскада, связь которого с первым входом предварительного каскада осуществляется через устройство выделения амплитуды входного сигнала предварительного каскада, а со вторым входом предварительного каскада осуществляется через формирователь знака и переключатель порядка чередования фаз; при этом дополнительный вход переключателя порядка чередования фаз связан с выходом преобразователя сигнала датчика положения магнитного потока ротора, выход преобразователя выходных сигналов датчиков тока каждой фазы подсоединен к третьему входу предварительного каскада, четвертый вход которого через устройство блокировки связан с блоком контроля ошибки и датчиком тока потребления усилителя мощности, причем выход датчика положения штока через преобразователь сигналов датчика положения штока связан с входом второго узла сравнения входного устройства. Кроме того, преобразователь сигналов датчиков тока фаз трехфазного синхронного двигателя выполнен в виде последовательно соединенных для каждого датчика тока резистора и диода, при этом свободные концы диодов подключены к выходной обмотке соответствующего датчика тока; свободные концы резисторов объединены и образуют выход преобразователя сигналов датчиков тока, а свободные концы выходных обмоток датчиков тока подсоединены к среднему выводу дополнительного источника питания, причем механическая передача выполнена в виде шарико-винтовой пары, а приборный редуктор выполнен по безлюфтовой схеме с использованием разрезных подпружиненных шестерен.
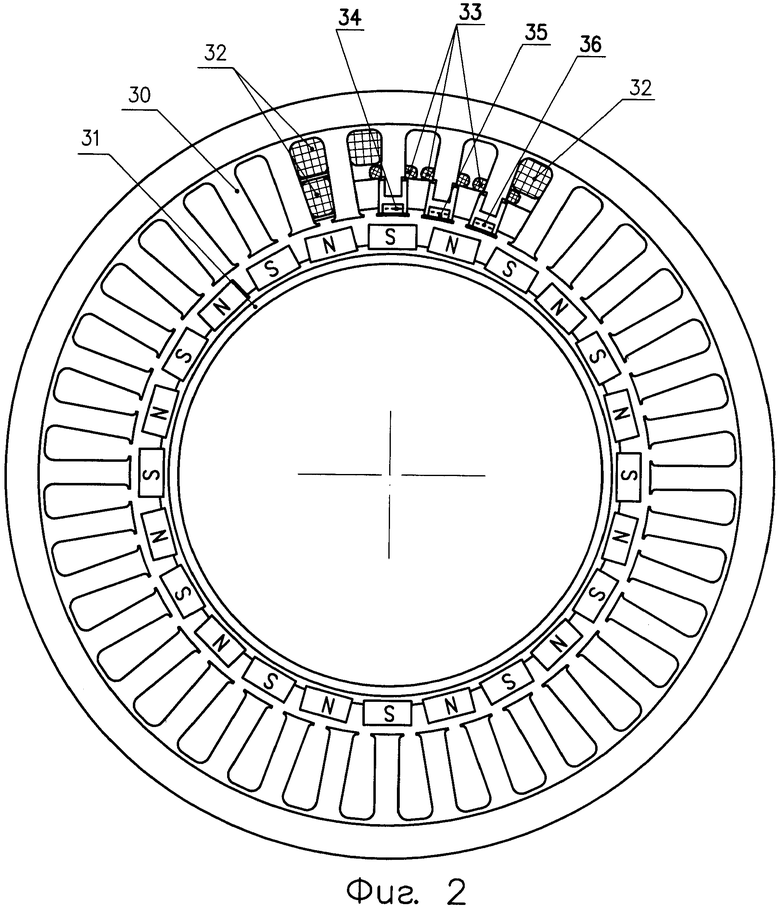
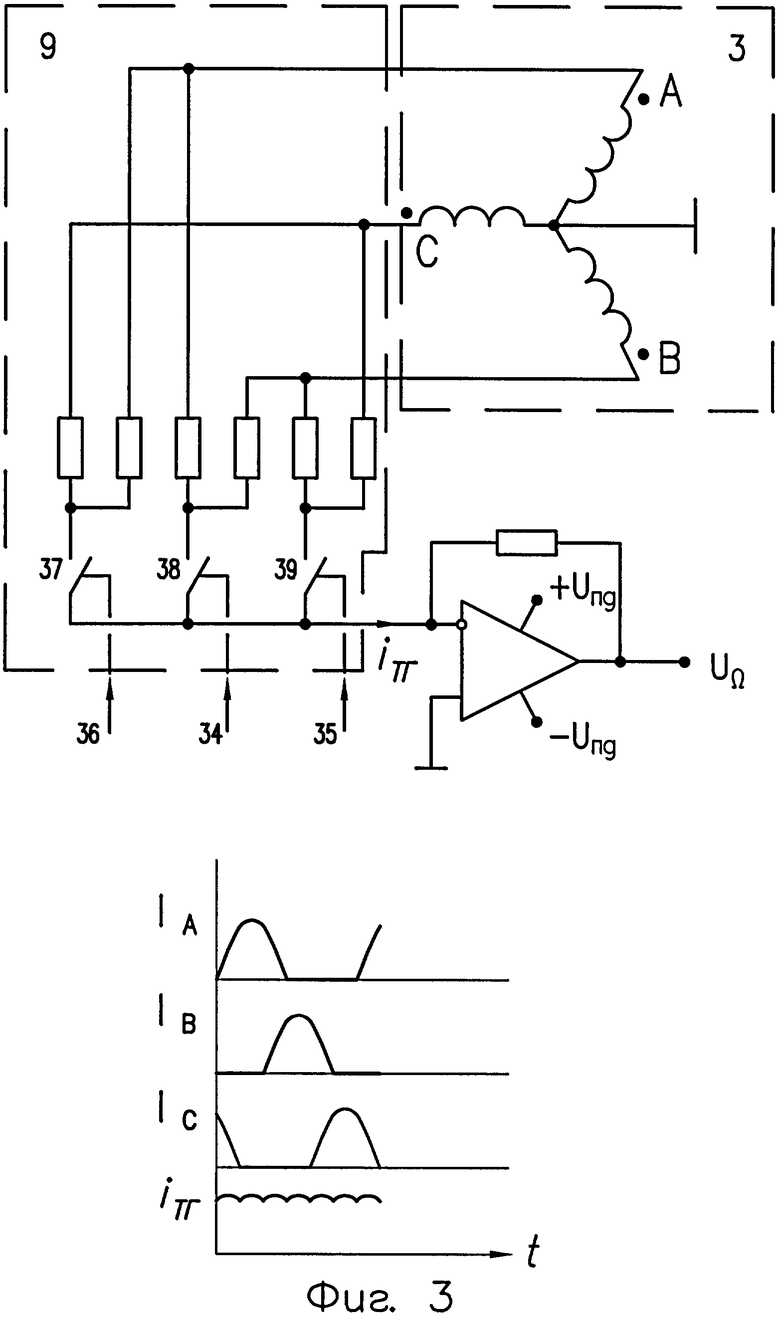
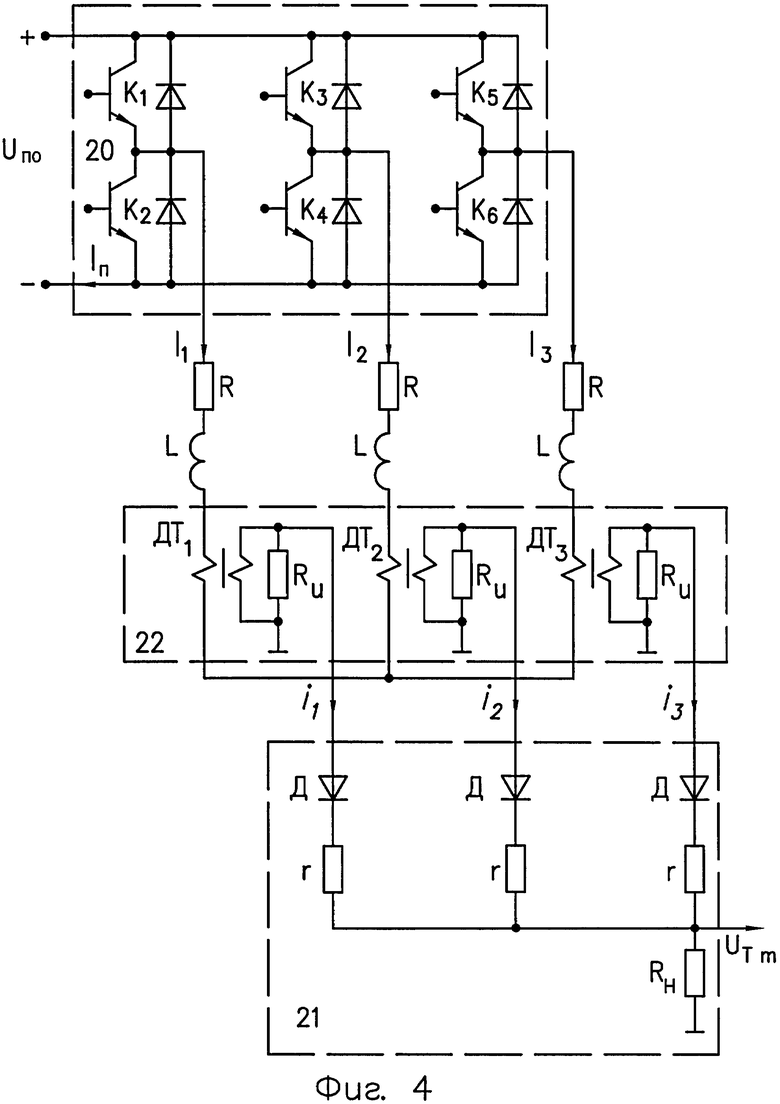
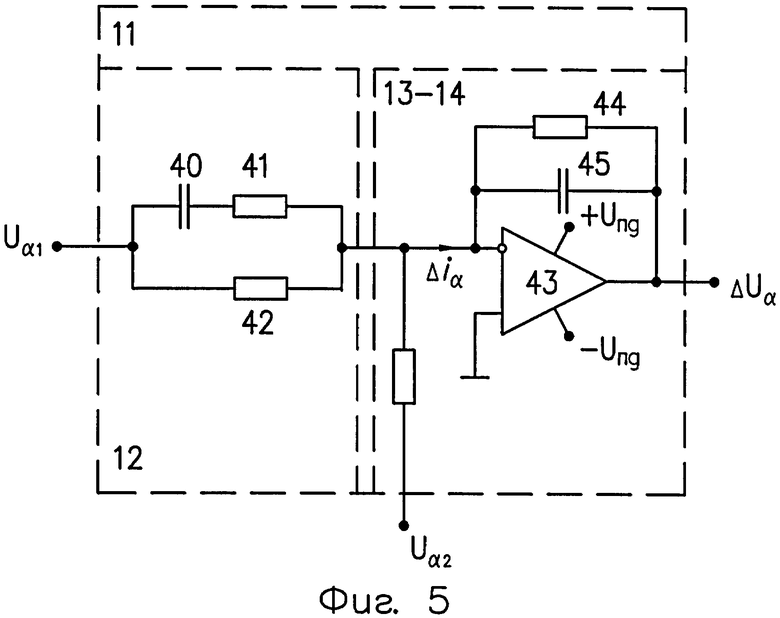
На фиг.1 представлена структурная схема электрического следящего привода; на фиг.2 - магнитопровод синхронного двигателя с синхронным генератором и датчиком положения магнитного потока ротора, которые объединены в исполнительный агрегат (ИА); на фиг.3 - схема преобразователя сигналов синхронного генератора; на фиг.4 - схема усилителя мощности с датчиком тока; на фиг.5 - схема входного устройства.
Привод (фиг.1) содержит исполнительный механизм (ИМ), включающий в себя: исполнительный агрегат (ИА), состоящий из синхронного двигателя (СД) - 1, датчика положения магнитного потока ротора (ДППР) - 2 и синхронного генератора (СГ) - 3; силовой редуктор (СР) - 4, выполненный на основе шарико-винтовой передачи (ШВП) с выходным штоком (Ш) - 5, приборный редуктор (ПР) - 6 и датчик положения выходного штока (ДПШ) - 7, а также - электронную схему, в которую входят: питающий генератор (ПГ) - 8; преобразователь сигналов синхронного генератора (ПССГ) - 9; преобразователь сигналов датчика положения магнитного потока ротора (ПСДППР) - 10; входное устройство (ВУ) - 11 с пропорционально-дифференцирующим - 12 и интегропропорциональным - 13 звеньями, связанными между собой через второй узел сравнения - 14; входной каскад - 15 (с первым узлом сравнения на входе); устройство - 16 выделения амплитуды входного сигнала; формирователь знака - 17 входного сигнала; переключатель порядка чередования фаз - 18 входных сигналов предварительного каскада (ПК) - 19 (содержащий в том числе узел сравнения, логический преобразователь (ЛП) и драйвер). В привод также входит усилитель мощности - 20, выполненный как трехфазный мостовой инвертор (на шести ключах K1÷К6, см. фиг.4); преобразователь - 21 выходного тока (ПВТ) инвертора с блоком датчиков тока на входе - 22; блок контроля - 23 выходного сигнала (сигнала ошибки) входного устройства - 11; датчик тока потребления инвертора - 24, устройство блокировки - 25; преобразователь - 26 выходного сигнала ДПШ - 7; основной - 27 и дополнительный - 28 (со средним выводом - 29) источники питания.
Трехфазный исполнительный агрегат (ИА) выполнен на едином магнитопроводе (фиг.2) с 36-ю пазами (и зубцами) на статоре - 30 при 24 полюсах на роторе - 31. В 33-х пазах размещена трехфазная силовая обмотка синхронного двигателя (Wд) - 32, а на трех соседних зубцах, свободных от обмоток синхронного двигателя, размещена трехфазная обмотка синхронного генератора (Wг) - 33. Выделение отдельных пазов под обмотку Wг уменьшает взаимоиндуктивную связь обмоток Wд и Wг и дает возможность разместить на этих зубцах три микросхемы 34, 35, 36 с датчиками ЭДС Холла, которые и образуют датчик положения магнитного потока ротора (ДППР) исполнительного агрегата ИА. Такая конструкция ИА (в сочетании с зубцовым шагом обмотки статора и многополюсным ротором синхронного двигателя) обеспечивает высокое быстродействие привода при хороших весогабаритных показателях и дает возможность получить широкую полосу пропускания, а следовательно, - большой коэффициент усиления привода.
Преобразователь сигналов синхронного генератора - 9 (фиг.3) построен по схеме однополупериодного синхронного детектора тока, причем для обеспечения синфазности напряжения фаз синхронного генератора и моментов переключения электронных ключей 37, 38, 39 (учитывая, что магнитный поток, управляющий ключами посредством микросхем 34, 35, 36, сдвинут по отношению к фазе напряжения синхронного генератора на 90° эл.) к каждому ключу подсоединены по два резистора с выходов разных фаз синхронного генератора для создания дополнительного сдвига фаз на 30° эл. (с целью получения необходимого угла в 120°=90°+30°). Причем в случае сложения тока фаз (фиг.3), а не напряжений, пульсации выходного тока при однополупериодном детектировании определяются 6-й гармоникой выпрямляемого тока так же, как и при двухполупериодном выпрямлении.
Такое упрощенное построение преобразователя - 9 дает возможность упростить и обмотки синхронного генератора, то есть использовать не шесть, а только три полуобмотки (по одной на каждую фазу СГ) и три, а не шесть ключей, а также шесть, а не двенадцать резисторов.
Выполнение усилителя мощности - 20 в виде трехфазного мостового инвертора (фиг.4) на шести силовых ключах (против восьми ключей при двухфазном варианте прототипа) упрощает схему привода.
Преобразователь выходного тока инвертора - 21 выполнен (фиг.4) по схеме трехфазного однополупериодного выпрямителя тока (аналогично схеме синхронного детектора на фиг.3). Это обеспечивает формирование амплитуды выходных токов с коэффициентом передачи К=1 и упрощает схему.
Преобразователь сигналов датчика положения магнитного потока ротора - 10 выполнен на шести логических элементах (типа серии 1533) - по два включенных последовательно на каждую фазу датчика. Преобразователь обеспечивает формирование шести управляющих сигналов для ключей инвертора.
Входное устройство - 11 (фиг.1) содержит пропорционально-дифференцирующий контур (звено 12) в цепи сигнала задания (Uα1) на пассивных элементах 40, 41, 42 (фиг.5) и узел сравнения (14) на операционном усилителе 43 интегро-пропорционального звена (13) в цепи сигнала ошибки Δiα≡ΔUα=Uα1-Uα2 (элементы 44, 45 на фиг.5).
Это обеспечивает увеличение коэффициента усиления привода в рабочем диапазоне частот и подавление высокочастотных помех на выходе входного устройства.
Входной каскад - 15 (фиг.1) помимо узла сравнения содержит усилитель, на выходе которого образуется напряжение Uу=ΔUα-UΩ.
Устройство выделения амплитуды входного сигнала - 16 (фиг.1) содержит схему выпрямления, на выходе которой образуется амплитудное значение (Uуm) сигнала Uу.
Формирователь - 17 знака (фиг.1) сигнала Uу (sign Uу) содержит логическую схему (на элементах типа серия 1533) с компаратором на выходе. Схема формирует сигнал управления для переключателя 18 порядка чередования фаз выходного тока инвертора - 20 (ABC или АСВ). Переключатель - 18 содержит набор электронных ключей, подсоединенных своим входом к формирователю 17.
Предварительный каскад 19 (фиг.1) кроме узла сравнения, на выходе которого образуется сигнал ΔUm=Uуm-UTm, содержит логический преобразователь (например, на элементах типа 1533), а также драйвер (например, типа IR2130), управляющий силовыми ключами (в частности типа IGBT) мостового инвертора.
Блок контроля 23 (фиг.1) содержит компараторы с дискретным выходом, формирующие, наряду с датчиком тока - 24, сигналы управления для устройства блокировки - 25 при превышении величинами ΔUα и Iп заданного значения.
Устройство блокировки 25 выполнено с использованием электронных ключей.
В качестве датчика положения штока (ДПШ) - 7 здесь используется датчик угла типа 2,5БВТ, запитанный напряжением повышенной частоты от питающего генератора (ПГ) - 8, выполненного на операционном усилителе [4].
Преобразователь сигналов - 26 ДПШ (ПСДПШ) выполнен на основе фазочувствительного выпрямителя с опорным напряжением, поступающим от ПГ-8.
Электрический следящий привод работает следующим образом: при подаче на вход входного устройства 11 сигнала Uα1 он попадает (через входной каскад 15 и устройство выделения амплитуды 16) на вход предварительного каскада и посредством драйвера инициирует включение соответствующих силовых ключей мостового инвертора в разных стойках моста (одного верхнего и одного нижнего), обеспечивая впоследствии шестишаговое управление силовыми ключами. При этом на выходе инвертора образуется ток, питающий синхронный двигатель, который начинает вращаться. Порядок включения силовых ключей определяется знаком сигнала Uу и датчиком положения магнитного потока ротора (посредством устройств 17, 18 и 10).
Наличие обратной связи по амплитуде силового тока, организованной посредством датчиков тока блока 22 и преобразователя токов 21, обеспечивает моментное управление синхронным двигателем в режиме вентильного привода.
Вращение исполнительного агрегата ИА будет продолжаться до тех пор, пока напряжение Uα2 не станет равным Uα1 (полагая при большом коэффициенте усиления привода ΔUα=0). Тогда при соответствующих величинах коэффициента редукции механической передачи (силового и приборного редукторов 4 и 6), коэффициента преобразования датчика положения 7 штока 5 и коэффициента передачи фазочувствительного выпрямителя 26, и величины α1 и α2 будут равны между собой.
В том случае, когда знак входного сигнала Uα1 изменится на противоположный, формирователь знака 17 выдает сигнал на переключение порядка чередования фаз устройству 18 и оно изменит порядок переключения ключей инвертора 20 (через блок 19), обеспечив смену порядка чередования фаз, например с ABC на АСВ.
Если величина ΔUα или величина тока питания Iп инвертора в процессе работы превысит установленное заранее значение, блок контроля - 23 или датчик тока - 24, соответственно, выдаст сигнал устройству блокировки - 25 и последнее «заморозит» состояние силовых ключей инвертора и заблокирует тем самым дальнейшее перемещение штока - 5, обеспечив поддержание штока в данном положении.
Это особенно важно в многоприводных системах, в частности в системах управления положением интерцепторов быстроходных катеров.
Такое выполнение электрического следящего привода позволяет расширить область применения привода, т.е. использовать его и в позиционных системах управления, упростить как конструкцию исполнительного агрегата, так и электронную схему управления. При этом обеспечивается (за счет расширения полосы пропускания) высокий коэффициент усиления в приводе, а следовательно, и высокая точность отработки входного сигнала. Кроме того, в приводе существенно уменьшено запаздывание в отработке входного сигнала, что дало возможность обеспечить работу на более высоких частотах без потери точности.
Источники информации
1. Авторское свидетельство СССР №1418879, кл. Н02Р 6/02, 1988 г.
2. Авторское свидетельство СССР №1297186, кл. Н02К 29/06, 1987 г.
3. Авторское свидетельство СССР №2087068, кл. Н02Р 6/00, Н02К 29/14, Н02Р 6/06, 1997 г.
4. Гальперин М.В. Практическая схемотехника в промышленной автоматике. М., Энергоатомиздат, 1987 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2019 |
|
RU2724926C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД ПОВОРОТНОЙ ПЛАТФОРМЫ | 2017 |
|
RU2656999C1 |
| НАГРУЖАЮЩЕЕ УСТРОЙСТВО СТЕНДА ДЛЯ ИСПЫТАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2032889C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2061299C1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2013 |
|
RU2539347C1 |
| Система возбуждения асинхронизированной синхронной машины | 2021 |
|
RU2761246C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
Изобретение относится к области электротехники и может быть использовано в системах управления и регулирования. Техническим результатом является упрощение конструкции исполнительного механизма и электронной схемы привода и расширение области применения. Электрический следящий привод содержит исполнительный механизм с синхронным двигателем, синхронным генератором и датчиком положения магнитного потока ротора; электронный блок управления с входным каскадом с первым узлом сравнения, предварительным каскадом и усилителем мощности; датчик тока каждой фазы двигателя; основной и дополнительный источники питания и преобразователь сигналов синхронного генератора; входное устройство с пропорционально-дифференцирующим звеном, вторым узлом сравнения и интегро-пропорциональным звеном; устройство выделения амплитуды входного сигнала предварительного каскада; формирователь знака входного сигнала; переключатель порядка чередования фаз; преобразователь выходного тока усилителя мощности; блок контроля сигнала ошибки; датчик величины тока потребления усилителя мощности и устройство блокировки; механическую передачу с выходным штоком, встроенную в исполнительный механизм; датчик положения выходного штока и приборный редуктор; питающий генератор и преобразователь сигналов датчика положения выходного штока; при этом исполнительный механизм выполнен на базе трехфазного синхронного двигателя, а усилитель мощности выполнен в виде трехфазного мостового инвертора; датчик положения магнитного потока ротора выполнен в виде трех микросхем с датчиками эдс Холла, каждая из микросхем размещена под зубцом соответствующей фазы обмотки синхронного генератора; обмотки синхронного генератора размещены на трех соседних зубцах, свободных от обмоток синхронного двигателя, и соединены на звезду, общая точка которых подключена к среднему выводу дополнительного источника питания; преобразователь сигналов синхронного генератора выполнен на электронных ключах, входы которых через резисторы подключены к выходу синхронного генератора, выходы объединены и образуют выход указанного преобразователя, а управляющие цепи ключей подсоединены к выходу соответствующих микросхем датчика положения магнитного потока ротора. 2 з.п. ф-лы, 5 ил.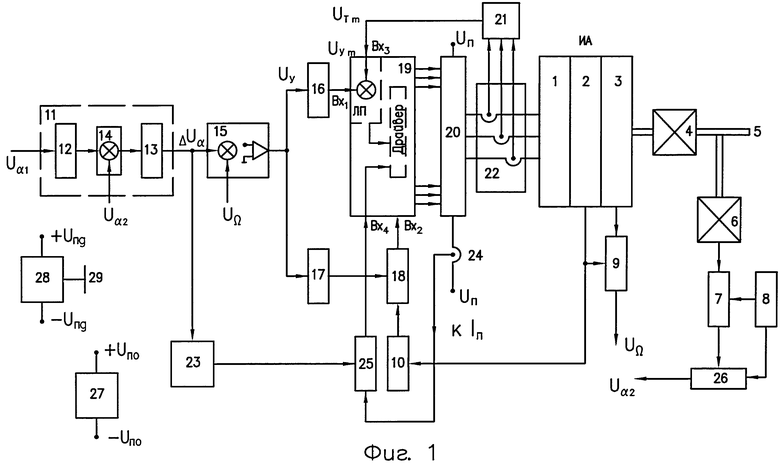
1. Электрический следящий привод, содержащий исполнительный механизм, включающий в себя синхронный двигатель с зубцовым статором, синхронный генератор и датчик положения магнитного потока ротора; электронный блок управления, включающий входной каскад с первым узлом сравнения, предварительный каскад с многофункциональным входом, инициирующий усилитель мощности, питающийся от основного источника постоянного тока и обеспечивающий питание синхронного двигателя; датчик тока каждой фазы синхронного двигателя, дополнительный источник питания со средним выводом и преобразователь сигналов синхронного генератора, выход которого подключен к первому узлу сравнения, а выход входного каскада связан с первым входом предварительного каскада, отличающийся тем, что он дополнительно содержит: входное устройство, состоящее из последовательно соединенных пропорционально-дифференцирующего звена, второго узла сравнения и интегро-пропорционального звена; устройство выделения амплитуды входного сигнала предварительного каскада; формирователь знака входного сигнала; переключатель порядка чередования фаз с дополнительным входом; преобразователь выходных сигналов датчика тока каждой фазы синхронного двигателя; блок контроля сигнала ошибки; датчик тока потребления усилителя мощности и устройство блокировки; механическую передачу с выходным штоком, встроенную в исполнительный механизм; приборный редуктор и связанный с ним датчик положения выходного штока с питающим генератором и преобразователь сигналов датчика положения выходного штока; при этом исполнительный механизм выполнен на базе трехфазного синхронного двигателя, а усилитель мощности выполнен в виде трехфазного мостового инвертора; датчик положения магнитного потока ротора выполнен в виде трех микросхем с датчиками э.д.с. Холла, каждая из микросхем размещена под зубцом одной из фаз трехфазной обмотки синхронного генератора; обмотки синхронного генератора размещены на трех соседних зубцах, свободных от обмоток трехфазного синхронного двигателя, и соединены на звезду, общая точка которых подключена к среднему выводу дополнительного источника питания; преобразователь сигналов синхронного генератора выполнен на электронных ключах, входы которых через резисторы подключены к выходу синхронного генератора, выходы электронных ключей объединены и образуют выход преобразователя сигналов синхронного генератора, а управляющие цепи электронных ключей подсоединены к выходу соответствующих микросхем датчика положения магнитного потока ротора; причем выход входного устройства подключен ко входу входного каскада, связь которого с первым входом предварительного каскада осуществляется через устройство выделения амплитуды входного сигнала предварительного каскада, а со вторым входом предварительного каскада осуществляется через формирователь знака и переключатель порядка чередования фаз; при этом дополнительный вход переключателя порядка чередования фаз связан с выходом преобразователя сигнала датчика положения магнитного потока ротора, выход преобразователя выходных сигналов датчика тока каждой фазы подсоединен к третьему входу предварительного каскада, четвертый вход которого через устройство блокировки связан с блоком контроля ошибки и датчиком тока потребления усилителя мощности, причем выход датчика положения штока через преобразователь сигналов датчика положения штока связан с входом второго узла сравнения входного устройства.
2. Электрический следящий привод по п.1, отличающийся тем, что преобразователь сигналов датчиков тока фаз трехфазного синхронного двигателя выполнен в виде последовательно соединенных для каждого датчика тока резистора и диода, при этом свободные концы диодов подключены к выходной обмотке соответствующего датчика тока; свободные концы резисторов объединены и образуют выход преобразователя сигналов датчиков тока, а свободные концы выходных обмоток датчиков тока подсоединены к среднему выводу дополнительного источника питания.
3. Электрический следящий привод по п.1, отличающийся тем, что механическая передача выполнена в виде шарико-винтовой пары, а приборный редуктор выполнен по безлюфтовой схеме с использованием разрезных подпружиненных шестерен.
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| US 5982135 A, 09.11.1999 | |||
| DE 10220164 A1, 16.10.2003 | |||
| DE 4310772 A1, 06.10.1994 | |||
| JP 2000078881 A, 14.03.2000 | |||
| Способ переработки кусковых отходов твердых сплавов | 1945 |
|
SU65614A1 |
| МАГНИТНЫЙ РАЗЪЕМНЫЙ НЕГАТИВ | 1995 |
|
RU2093112C1 |

