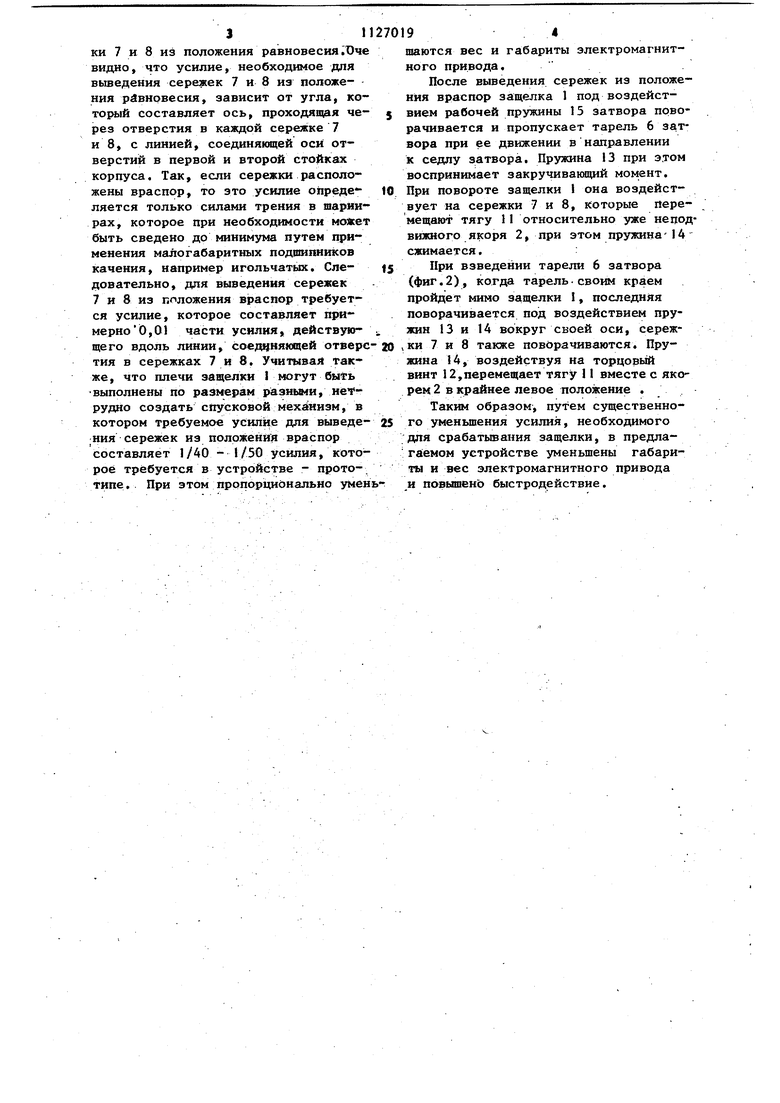
Изобретение относится к вакуумной технике, в частности к вакуумным затворам. Известен спусковой механизм ваку умного затвора, содержащий защелку, смонтированную, на корпусе затеора, и электромагнитный привод . Недостаток известного устройства - малое быстродействие затвора. Наиболее близким техническим решением к изобретению является спусковой механизм быстродействующего вакуумного затвора, содердсавсий корпус, установленный на нем электромагнитный привод с, якорем, соединен ным с защелкой 2 . Недостаток данного решения зак лючается в том, что значительная сила трения между защелкой и тарелью уменьшает быстродействие затвора, Поставленная цель достигается те что в спусковой механизм быстродейс вующего вакуумного затвора, содержащий корпус, установленньй на нем электромагнитный привод с якорем, соединённым с защелкой, введены тяга, один конец которой вьтолнен в в де вилки с проушинами в боковых лепестках, первая и вторая стойки, установленные на корпусе, и две сережки, соединенные шарнирно штифтом, установленнным с возможностью перемещения в проушинах вилки тяги периферийные концы сережек соединены шарнирно соответственно с второй стойкой и плечом защелки, шаполненной в виде подпружиненного рычага, установленного на первой стойке, ко торая зеркал чо-симметрична второй стойке относительно оси якоря, выполненного в виде стакана с размещенным в нем вторым концом тяги, пр ходящей через отверстие в дне стака на, и снабженного толкателем. На фиг. I изображенобщий вид предлагаемого спускового механизма быстродействующего вакуумного затвора при взведенной тарели; на фиг. то же, при закрытом затворе; на .,. 3 - сечение А-А на фиг.1; на фаг.4 - сечение Б-Б на фиг.1} на фиг.5 - сечение В-В на фиг.1. Спусковой механизм быстродейству щего вакуумного затвора содержит .защелку 1, приводимую в движение як рем 2, который размещен в корпусе 3 на котором также монтируется электромагнитный привод 4. В корпусе 3 устанавливается первая стойка корпуса 5, на которой смонтирована шарНирно защелка 1, удерживающая тарель 6 во взведенном положений за ее край. С защелкой шарнирно связана первая сережка 7, которая в свою очередь шарнирно связана с второй сережкой .8. Последняя шарнирно прикреплена к второй стойке корпуса 9, которая установлена в корпусе 3. Вилка тяги 10, . скрепленная с тягой 11, шарнирно соединена с сережками 7 и 8 в месте их соединения между собой. В торец тяги 11 для закрепления на ней якоря 2 ввертывается торцовый винт-толкатель 12. Пружина 13 кручения и пружина 14 сжатия предназначаются для возвращения защелки 1, выполненной в виде рычага, подпружиненного пружиной 13, и якоря 2 в исходное положение после взведения рабочей пружины 15 затвора вместе с тарелью 6 при открывании затвора. Щтифты 16 предназначены для шарнирных соединений деталей устройства между собой. Направляющая вту. .ка якоря 17 (помимо выполнения функций направляющей), служит также для герметичной изоляции якоря 2 от магнитопровода 18 электромагнитного привода. Дпя разъемного уплотнения корпуса 3 относительно корпуса 19 зат-вора служит уплотнитель 20. Предоагаемый механизм работает следующим образом. Во взведенном положении тарель 6 затвора удерживается защелкой (фиг.1) благодаря тому, что сережки 7 и 8 расположены таким образом, что усилие рабочей пружины 15 затвора через защелку и сережки передается второй стойке корпуса 9 (сережки расположены враспор). Незначительная силовая составляквдая, действующая вдоль оси тяги 11 со стороны сережек, обеспечивает через посредство торцового винта 12 фиксированное положение тяги 11 и якоря 2 в крайнем левом положении. При срабатывании электромагнитного привода 4 якорь 2 притягивается к магнитрпроводу 18 вправо, при этом усилие со стороны якоря 2 передается посредством винта 12 тяге 11. Тяга 1 1 ,. воздействуя через вилку, тяГИ Ю и штифт 16, выводит сережки 7 и 8 из положения равновесия .иче видно, что усилие, необходимое для выведения сережек 7 и 8 из положе- ния равновесия, зависит от угла, кото1 |й составляет ось, проходящая через отверстия в каждой сережке7 и 8, с линией, соединяющей оси отверстий в первой и второй стойках корпуса. Так, если сережки расположены враспор, то это усилие определяется только силами трения в шарнирах, которое при необходимости может быть сведено до минимума путем применения малогабаритных подшипников качения, например игольчатых, Следовательно, для выведения сережек 7 и 8 из положения враспор требуется усилие, которое составляет примерно О, 01 части усилия, действующего вдоль линии, соеда|ня1ощей отверс тия в сережках 7 и 8. Учитывая также , что плечи защелки I могут быть выполнены по размерам разнш и, нетрудно создать спусковой механизм, в котором требуемое усилие для выведе ния сережек из положений враспор составляет 1/40-1/50 усилия, которое требуется в устройстве - прототипе. . При этом пропорционально уменшаются вес и габариты электромагнитного привода.
После выведения сережек из положения враспор защелка 1 под воздействием рабочей пружины 15 затвора поворачивается и пропускает тарель 6 затвора при ее движении в направлении к седлу затвора. Пружина 13 при э.том воспринимает закручивающий момент. При повороте защелки 1 она воздействует на сережки 7 и 8, которые перемещают тягу 1I относительно уже неподвижного якоря 2, при этом пружина- 14 сжимается. :
При взведении тарели 6 затвора (фиг.2), когда тарель.своим краем пройдет мимо защелки I, последняя поворачивается под воздействием пружин 13 и 14 вокруг своей оси, сереж ки 7 и 8 также поворачиваются. Пружина 14, воздействуя на торцовый винт 12,перемещает тягу 11 вместе с якорем 2 в крайнее левое положение .
Таким образом, путем существенного уменьшения усилия, необходимого для срабатывания защелки, в предлагаемом устройстве уменьшены габариты и вес электромагнитного привода и повышено быстродействие.
Фиг.1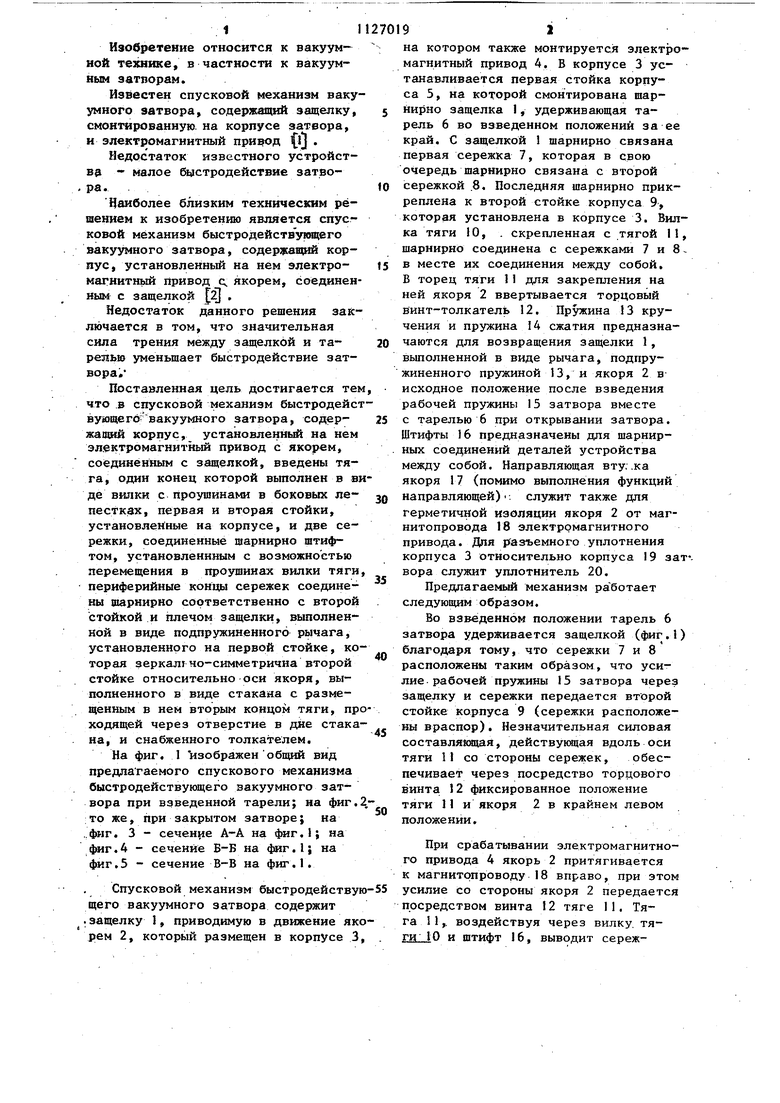
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный затвор | 1980 |
|
SU932050A1 |
| Вакуумный быстродействующий прямоточный затвор | 1981 |
|
SU1157979A1 |
| Запирающий механизм вакуумного быстродействующего затвора | 1972 |
|
SU473235A1 |
| ПРЕДОХРАНИТЕЛЬНО-ЗАПОРНЫЙ КЛАПАН | 2015 |
|
RU2594097C1 |
| ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН И АВТОМАТИЧЕСКИЙ ПИСТОЛЕТ | 1996 |
|
RU2113678C1 |
| РАКЕТНО-ТОРПЕДНАЯ ПУСКОВАЯ УСТАНОВКА | 1999 |
|
RU2148773C1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ | 2018 |
|
RU2683036C1 |
| Вакуумный прогреваемый затвор | 1986 |
|
SU1396172A1 |
| Программный электронный затвор фотоаппарата | 1987 |
|
SU1465861A1 |
| ТОЛЬКО САМОВЗВОДНЫЙ УДАРНО-СПУСКОВОЙ МЕХАНИЗМ С МАЛЫМ УСИЛИЕМ ДЛЯ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 2016 |
|
RU2670546C2 |

СПУСКОВОЙ МЕХАНИЗМ KJCTPOДЕЙСТВУЮЩЕГО ВАКУУМНОГО ЗАТЮРА, содержащий корпус, установленный на нем электромагнитный привод с якорем , соединенным с.защелкой, отличающийся тем, что, с целью повышения быстродействия, в него введены тяга, один конец которой выполнен в виде вилки с проушинами в боковых лепестках, первая и вторая стойки, установленные на корпусе, и две сережки соединенные , шарнирно штифтом, установленным с возможностью перемещения в проуши- . нак вилки тяги, периферийные концы сережек соединены шарнирно соответот венно с второй стойкой и плечом защелки, выполненной в де подпружиненного, рычага, установленного на Первой стойке, которая зеркальносимметрична второй стойке относительно оси якоря, выполненного в виде стакана с размещенным в нем вторым концом тяги, проходящей чере з от,верстие в дае стакана, и снабженного толкателем.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Быстродействующий газовый затвор | 1972 |
|
SU490982A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Запирающий механизм вакуумного быстродействующего затвора | 1972 |
|
SU473235A1 |
