Для измерения линейных ускорений применяют устройства, содержащие емкостный или иной дифференциальный датчик, включенный в самобалансирующуюся мостовую измерительную схему, усилитель и реверсивный электродвигатель, воздействующий на подвижный элемент датчикаПредлагаемое устройство отличается от известных устройств подобного рода тем, что подвижный элемент датчика укреплен на упругой металлической нити, натянутой на поворотную относительно ее оси рамку, связанную через редуктор с реверсивным электродвигателем.
Такое выполнение упругого элемента, создающего противодействующий момент и служащего одновременно упругой подвеской инертной массы датчика ускорений, позволяет повысить чувствительность устройства и точность измерений.
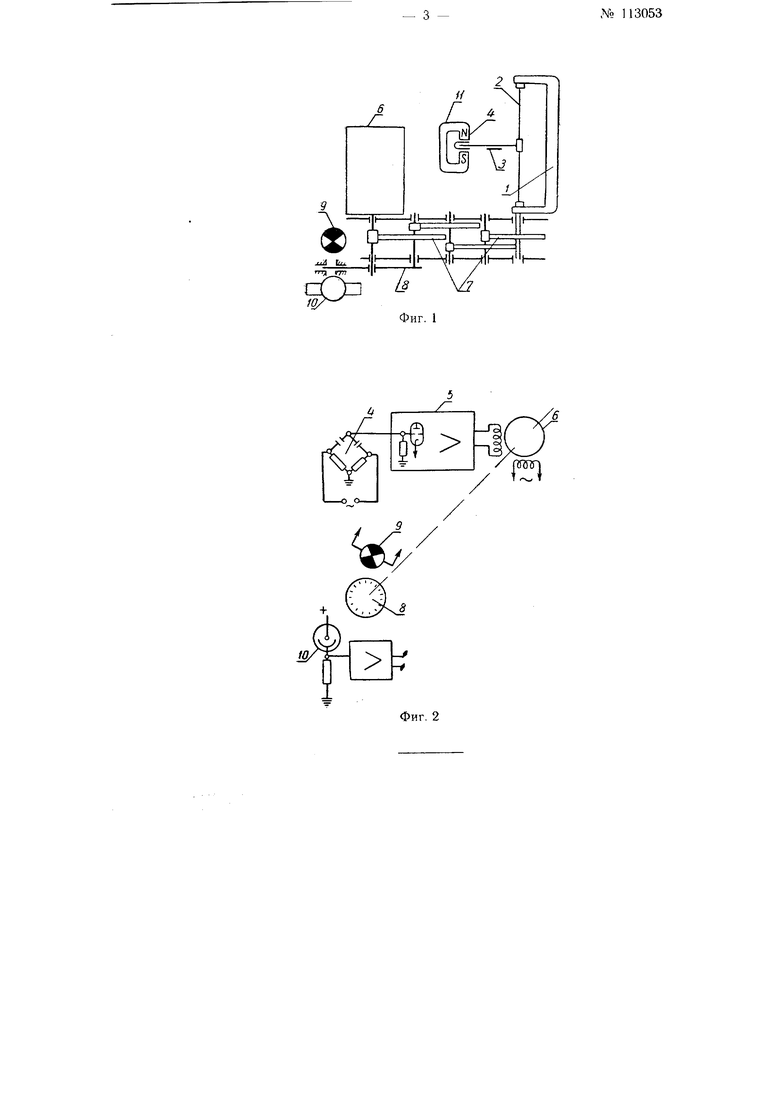
На фиг. 1 изображена кинематическая схема предлагаемого устройства; на фиг. 2 - его принципиальная электрическая схема.
На вертикальной рамке устройства натянута упругая нить 2, на которой укреплен подвижный элемент 5 емкостного или иного дифференциального датчика 4.
Емкостный датчик 4 включен в самобалансирующуюся мостовую измерительную схему с усилителем 5 и реверсивным электродвигателем 6, воздействующим на подвижный элемент датчика.
Предлагаемое устройство действует следующим образом.
При возникновении ускорения подвижный элемент 3 датчика 4 отклоняется от среднего положения, вследствие чего нарущается равновесие токов в плечах моста.
Сигнал с моста подается на усилитель 5, а затем на реверсивный двигатель 6. Двигатель 6 через редуктор 7 вращает рамку 1, которая закручивает нить 2 и возвращает подвижный элемент датчика 4 в положение равновесия. Так как момент, создаваемый нитью, пропорционален углу закручивания, угол поворота .рамки / пропорционален ускорению.
№ 113053
Угол поворота рамки / может быть преобразован в число импульсов, например, посредством диска 5 с прорезями, осветителя 9 и фотоэлемента 10.
Диапазон измерений предлагаемого устройства определяется, в основном, допустимым временем переходного процесса системы.
В связи с тем, что трение подвижного элемента датчика 4 в нити и о зоздух очень мало, затухание колебаний, возникаюндих при изменении ее положения, происходит очень медленно. Поэтому для быстрого ускорения подвижной системы датчика 4 в устройстве применяют постоянный магнит и, создающий демпфирование.
Предмет изобретения
Устройство для измерения линейных ускорений с применением емкостного или иного дифференциального датчика, включенного в самобалансирующуюся мостовую измерительную схему с усилителем и реверсивным электродвигателем, воздействующим на подвижный элемент датчика, отличающееся тем, что, с целью повыщения чувствительности и точности измерений, подвижный элемент датчика, являющийся инертной массой, укреплен на упругой металлической «ити, натянутой на поворотную относительно оси нити рамку, сопряженную через редуктор с указанным реверсивным двигателем.
tiA iii
rrn I
ЩЛ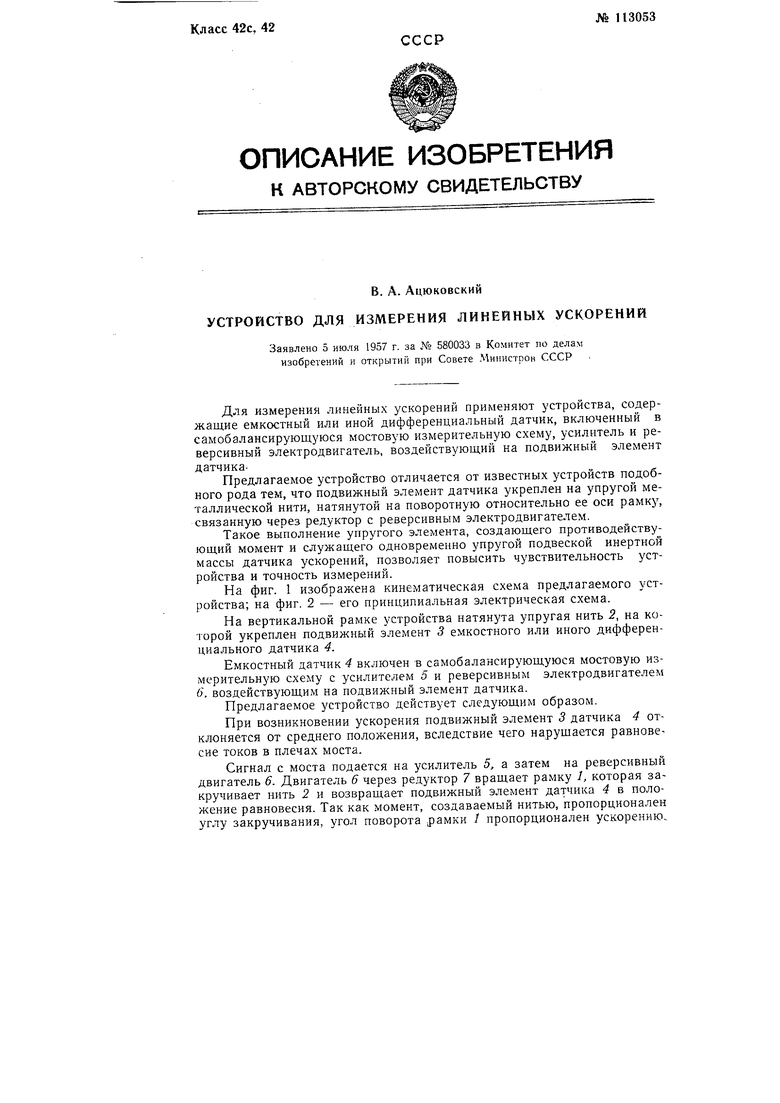
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скоростей и перемещений | 1957 |
|
SU114080A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ НА подвижном ОСНОВАНИИ | 1965 |
|
SU168477A1 |
| ИЗМЕРИТЕЛЬ МАССОВОЙ ПЛОТНОСТИ ЖИДКОСТИ | 1991 |
|
RU2035715C1 |
| РЕГУЛЯТОР ЛИНЕЙНОЙ ПЛОТНОСТИ ВОЛОКНИСТОГО ПРОДУКТА | 1991 |
|
RU2038437C1 |
| Координатный самописец для снятия характеристик точности чувствительных элементов манометрического типа | 1953 |
|
SU100970A1 |
| ТНО- ТЕХКИЗДС1:АЯ БИБЛЯОТЕКД | 1970 |
|
SU271086A1 |
| Двухотсчетный преобразователь "вал-цифра" | 1960 |
|
SU134483A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2233451C2 |
| Устройство для измерения малых углов наклона | 1982 |
|
SU1059425A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2042115C1 |