Настоящее изобретение относится к области измерительной техники, а именно к информационным преобразователям линейных ускорений.
Известен компенсационный акселерометр [1], содержащий корпус, установленную в нем пластину, имеющую внутреннюю неподвижную часть, внешнюю подвижную часть, соединенную с внутренней неподвижной частью двумя упругими перемычками, которые образуют упругий подвес с осью, проходящей через оси изгиба упругих перемычек, дифференциальный емкостный датчик положения с подвижными электродами на внешней подвижной части, магнитоэлектрический силовой преобразователь с кольцевой компенсационной катушкой и дисковым постоянным магнитом с диаметральным направлением намагниченности, расположенным на корпусе.
Наиболее близким по технической сущности является компенсационный акселерометр [2], содержащий корпус, установленную в нем пластину из монокристаллического кремния, имеющую внутреннюю неподвижную часть, внешнюю подвижную часть с первой и второй основными поверхностями, соединенную с внутренней неподвижной частью двумя упругими перемычками, которые образуют упругий подвес с осью, проходящей через оси изгиба упругих перемычек, дифференциальный емкостный датчик положения с подвижным электродом на внешней подвижной части и выполненными в виде металлизированных участков на установленной на стойке в корпусе плате неподвижными электродами, магнитоэлектрический силовой преобразователь с кольцевой компенсационной катушкой и дисковым постоянным магнитом с диаметральным направлением намагниченности, расположенным на корпусе, прикрепленные одними своими торцевыми поверхностями к расположенной напротив постоянного магнита первой основной поверхности внешней подвижной части пластины n (n=2, 3...) грузов, на другие торцевые поверхности которых установлена компенсационная катушка силового преобразователя, (n+1)-й груз, расположенный на второй основной поверхности внешней подвижной части пластины на радиусе, перпендикулярном оси подвеса, усилитель.
Недостатком такого компенсационного акселерометра является погрешность измерения ускорения от перекрестных связей вследствие несовпадения реальной и номинальной измерительных осей акселерометра, а также погрешность измерения, вызванная наличием сторонних сил, действующих на чувствительный элемент акселерометра.
Техническим результатом изобретения является повышение точности измерения ускорения.
Данный технический результат достигается в компенсационном акселерометре, содержащем корпус, установленную в нем пластину из монокристаллического кремния, имеющую внутреннюю неподвижную часть, внешнюю подвижную часть с первой и второй основными поверхностями, соединенную с внутренней неподвижной частью двумя упругими перемычками, которые образуют упругий подвес с осью, проходящей через оси изгиба упругих перемычек, дифференциальный емкостный датчик положения с подвижным электродом на внешней подвижной части и выполненными в виде металлизированных участков на установленной на стойке в корпусе плате неподвижными электродами, магнитоэлектрический силовой преобразователь с кольцевой компенсационной катушкой и дисковым постоянным магнитом с диаметральным направлением намагниченности, расположенным на корпусе, прикрепленные одними своими торцевыми поверхностями к расположенной напротив постоянного магнита первой основной поверхности внешней подвижной части пластины n (n=2, 3...) грузов, на другие торцевые поверхности которых установлена компенсационная катушка силового преобразователя, (n+1)-й груз, расположенный на второй основной поверхности внешней подвижной части пластины на радиусе, перпендикулярном оси подвеса, усилитель, отличающемся тем, что на расположенной по другую сторону от оси подвеса по сравнению с (n+1)-м грузом стороне второй основной поверхности внешней подвижной части пластины или на свободном торце компенсационной катушки установлены k грузов из монокристаллического кремния, на второй основной поверхности внешней подвижной части пластины по одну сторону с (n+1)-м грузом или в диаметрально противоположном положении по сравнению с ним установлена по крайней мере одна накладка из монокристаллического кремния, на свободной торцевой поверхности которой выполнен слой ферромагнитного материала калиброванной толщины до 0,3 мкм, массы mk вышеуказанных k грузов выполнены в соответствии с соотношением
где mn+1 - масса (n+1)-го груза;
11 - расстояние центра масс (n+1)-го груза от оси подвеса в направлении, перпендикулярном первой и второй основным поверхностям внешней подвижной части пластины;
α - угол между реальной измерительной осью и номинальной измерительной осью акселерометра;
12 - расстояние центра масс каждого из k грузов от оси подвеса в направлении, перпендикулярном первой и второй основным поверхностям внешней подвижной части пластины.
В предпочтительном варианте в качестве ферромагнитного материала применен никель.
Посредством установки на второй основной поверхности внешней подвижной части пластины или на свободном торце компенсационной катушки k грузов из монокристаллического кремния, массы которых выполнены в соответствии с расчетным соотношением, создается момент, компенсирующий момент, возникающий вследствие несовпадения реальной и номинальной измерительных осей акселерометра. В результате снижается погрешность от перекрестных связей и повышается точность измерения ускорений.
Путем установки на второй основной поверхности внешней подвижной части пластины накладки из монокристаллического кремния со слоем ферромагнитного материала компенсируется момент, создаваемый сторонними силами, поэтому уменьшается погрешность акселерометра и повышается точность измерения ускорений.
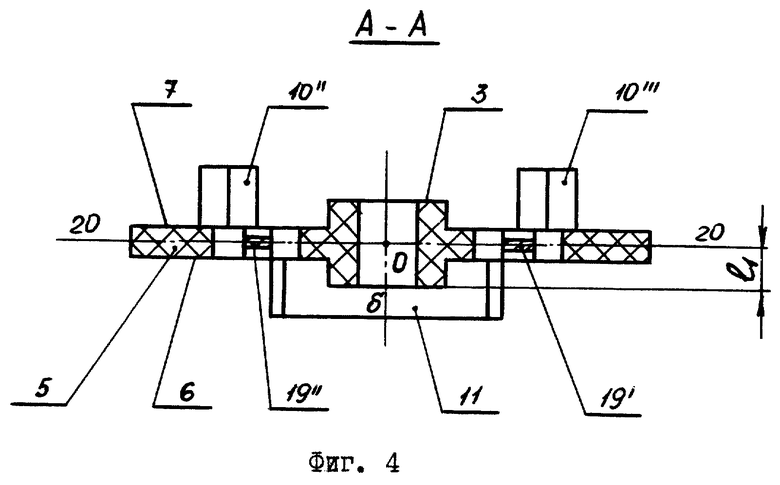
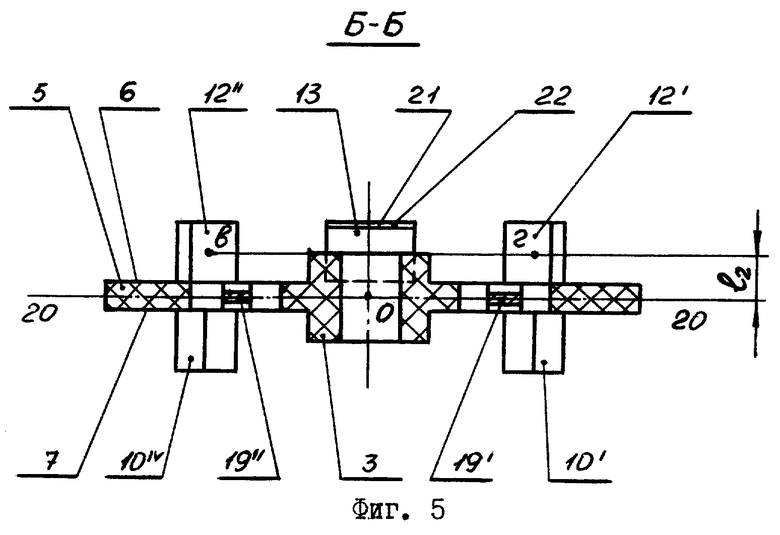
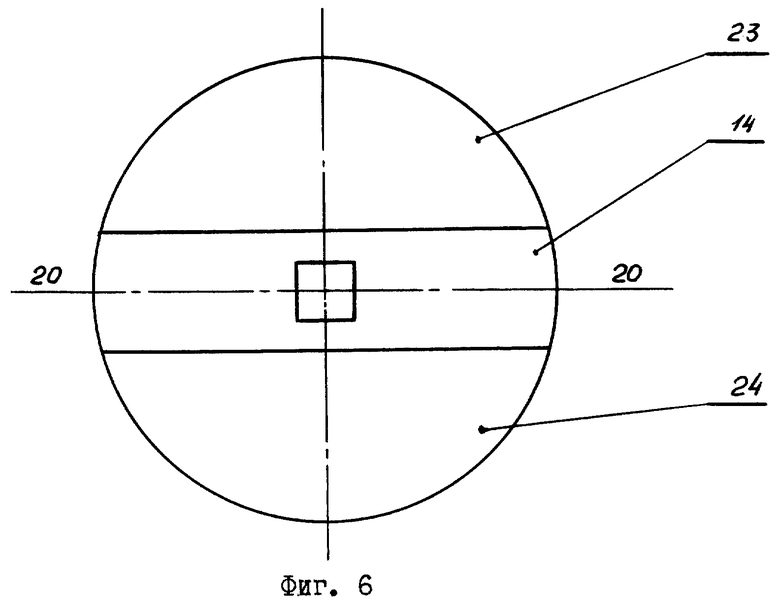
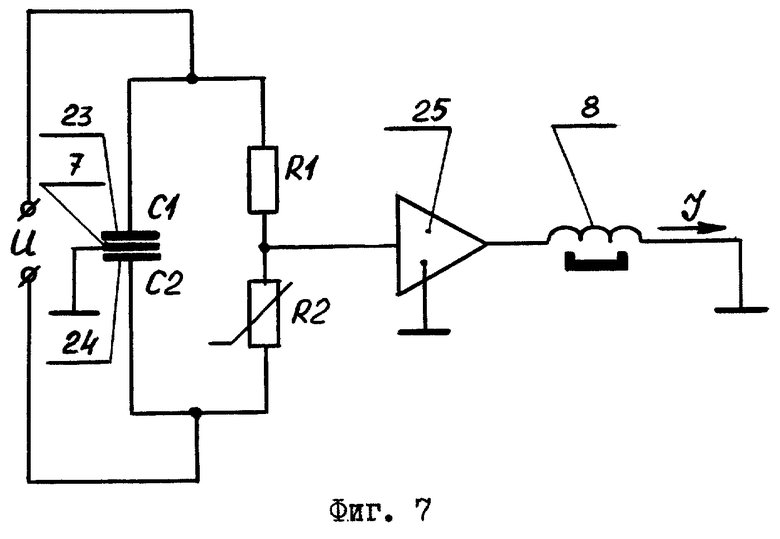
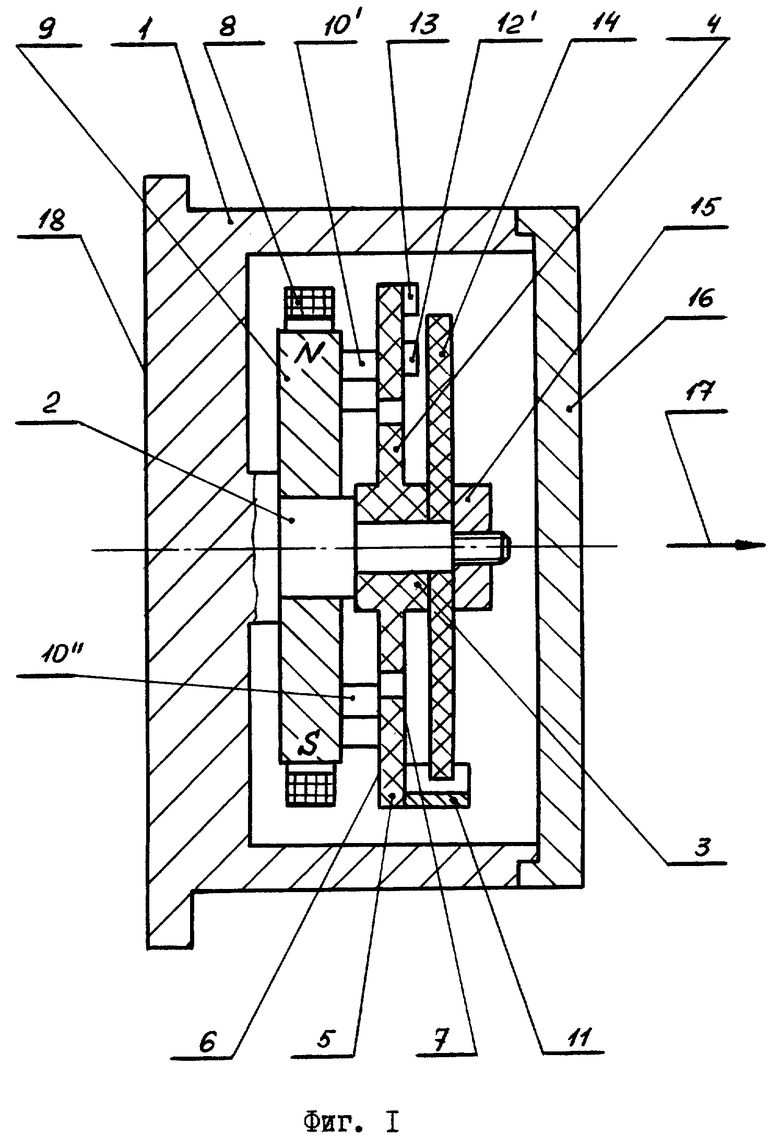
На фиг.1 представлен общий вид компенсационного акселерометра, на фиг.2, 3 - виды пластины с расположенными на ней элементами, на фиг.4, 5 - разрезы пластины, на фиг.6 - вид платы с неподвижными электродами, на фиг.7 - принципиальная электрическая схема компенсационного акселерометра.
В компенсационном акселерометре (фиг.1) в корпусе 1 на стойке 2 установлена пластина 3 из монокристаллического кремния, в которой образованы внутренняя неподвижная часть 4 и внешняя подвижная часть 5, имеющая первую основную поверхность 6 и вторую основную поверхность 7, выполненную электропроводной путем легирования кремния бором и служащую подвижным электродом дифференциального емкостного датчика положения. Со стороны первой основной поверхности 6 внешней подвижной части 5 расположены кольцевая компенсационная катушка 8 и постоянный магнит 9 магнитоэлектрического силового преобразователя. Постоянный магнит 9 выполнен в виде диска с диаметральным направлением намагниченности и установлен в корпусе 1 на стойке 2. Одними своими торцевыми поверхностями на первой основной поверхности 6 внешней подвижной части 5 закреплены грузы 10', 10" из n грузов, установленных на первой основной поверхности 6. На других торцевых поверхностях грузов 10', 10" установлена компенсационная катушка 8.
На второй основной поверхности 7 подвижной части 5 установлены (n+1)-й груз 11, груз 12' из k грузов из монокристаллического кремния, накладка 13 из монокристаллического кремния со слоем никеля. На стойку 2 установлена также плата 14, которая вместе с пластиной 3 закреплена в корпусе 1 посредством гайки 15. Корпус 1 закрыт крышкой 16. Номинальная измерительная ось 17 акселерометра направлена перпендикулярно плоскости 18 корпуса 1.
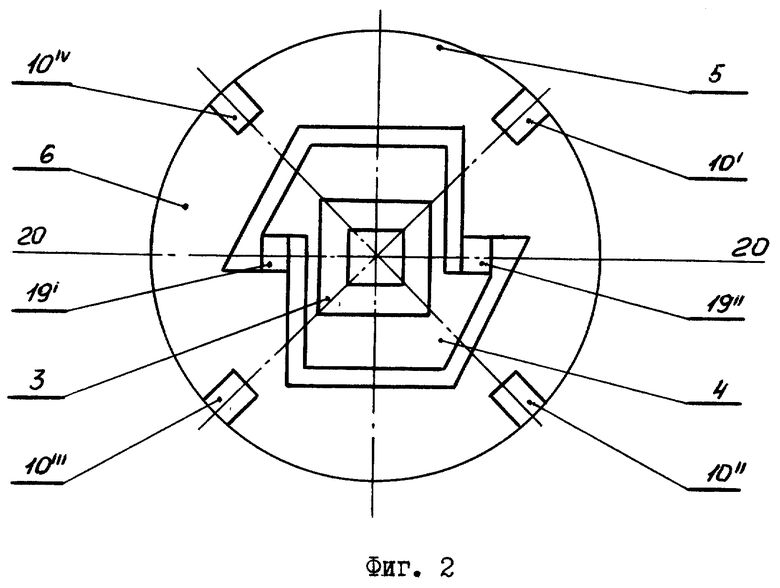
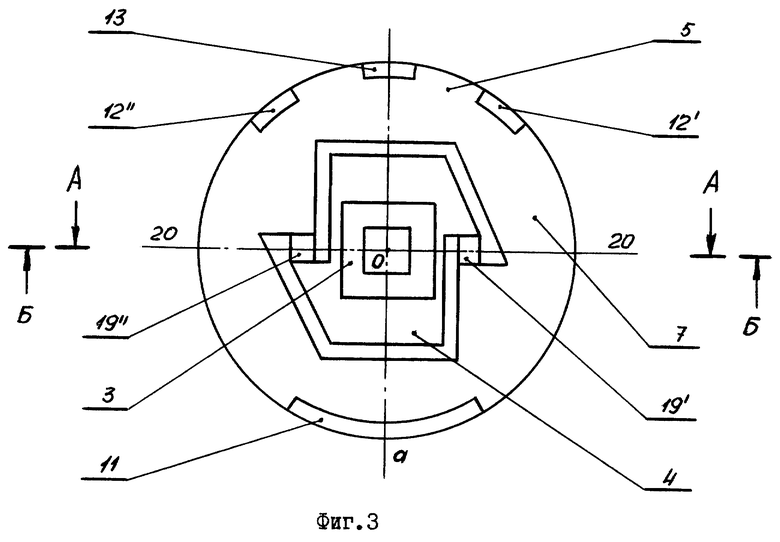
В пластине 3 (фиг.2) упругий подвес образован упругими перемычками 19', 19", соединяющими внешнюю подвижную часть 5 и внутреннюю неподвижную часть 4. Ось подвеса 20 - 20 образована осями изгиба упругих перемычек 19', 19". На первой основной поверхности 6 внешней подвижной части 5 установлены грузы 10', 10", 10'", 10iv для случая, когда n=4. При любом другом числе грузов угловое расстояние между ними равно 360°/n.
На второй основной поверхности 7 (фиг.3) внешней подвижной части 5 пластины 3 установлен (n+1)-й груз 11 на радиусе Оа, перпендикулярном оси подвеса 20 - 20. На стороне второй основной поверхности 7, противоположной той стороне, где расположен (n+1)-й груз 11, установлены грузы 12', 12" из монокристаллического кремния и накладка 13 из монокристаллического кремния. Грузы 12 могут быть установлены на второй основной поверхности 7 подвижной части 5 в любом количестве k. На второй основной поверхности 7 подвижной части 5 могут быть расположены накладки 13 в любом количестве с разной толщиной, вплоть до 0,3 мкм, выполненного на них слоя никеля.
Центр масс (точка "б") (n+1)-го груза 11 (фиг.4) расположен на расстоянии 11 от оси подвеса 20 - 20 в направлении, перпендикулярном первой основной поверхности 6 и второй основной поверхности 7 внешней подвижной части 5 пластины 3.
Центры масс ("в" и "г") (фиг.5) грузов 12', 12" расположены на расстоянии 12 от оси подвеса 20 - 20 в направлении, перпендикулярном первой основной поверхности 6 и второй основной поверхности 7 внешней подвижной части 5 пластины 3. На поверхности 21 накладки 13 выполнен слой никеля 22, который нанесен, например, путем напыления.
На плате 14 (фиг.6) выполнены расположенные симметрично относительно оси подвеса 20 - 20 металлизированные участки 23, 24, являющиеся неподвижными электродами дифференциального емкостного датчика положения.
На принципиальной электрической схеме (фиг.7) акселерометра дифференциальный емкостный датчик положения выполнен по мостовой схеме, запитываемой от источника переменной ЭДС U. Конденсатор С1 образован металлизированным участком 23 на плате 14 и выполненной электропроводной второй основной поверхностью 7 внешней подвижной части 5. Конденсатор С2 образован металлизированным участком 24 на плате 14 и выполненной электропроводной второй основной поверхностью 7 внешней подвижной части 5.
Резисторы R1, R2 являются элементами балансировки моста. Сигнал с мостовой схемы дифференциального емкостного датчика положения передается на вход усилителя 25 с корректирующим фильтром. К выходу усилителя 25 подключена компенсационная катушка 8, и выходным сигналом акселерометра является ток I, протекающий через компенсационную катушку 8.
Компенсационный акселерометр работает следующим образом. При отсутствии ускорения датчик положения сбалансирован, и на входе усилителя 25 отсутствует сигнал рассогласования, в результате чего выходной сигнал акселерометра равен нулю. При наличии ускорения, направленного по номинальной измерительной оси 17, под действием инерционной силы происходит угловое перемещение внешней подвижной части 5 относительно внутренней неподвижной части 4. Пусть направление ускорения таково, что при угловом перемещении внешней подвижной части 5 ее вторая основная поверхность 7, находящаяся напротив металлизированного участка 23 на плате 14, приближается к металлизированному участку 23, а противоположная относительно оси подвеса 20 - 20 часть второй основной поверхности 7 отдаляется от металлизированного участка 24 на плате 14. Тогда емкость конденсатора С1 увеличивается, емкость конденсатора С2 уменьшается и с выхода емкостного датчика положения поступает сигнал рассогласования в усилитель 25. В усилителе 25 переменный сигнал датчика положения преобразуется в сигнал постоянного тока, усиливается и поступает в компенсационную катушку 8 силового преобразователя. Постоянное магнитное поле, созданное протекающим по компенсационной катушке 8 током, взаимодействует с магнитным полем постоянного магнита 9 магнитоэлектрического силового преобразователя. В результате в магнитоэлектрическом силовом преобразователе создается компенсационная сила, возвращающая внешнюю подвижную часть 5 в исходное положение. Сила тока I, протекающего через компенсационную катушку 8, пропорциональна величине измеряемого ускорения, а знак тока соответствует направлению ускорения.
Массы mk грузов 12', 12" выполнены в соответствии с соотношением
где mn+1 - масса (n+1)-го груза 11;
α - угол между реальной измерительной осью, перпендикулярной первой и второй основным поверхностям 6, 7 подвижной части 5 пластины 3, и номинальной измерительной осью 17 акселерометра.
При выполнении условия (1) погрешность акселерометра от перекрестных связей, вызванных несовпадением реальной и номинальной измерительных осей, становится минимальной. В результате повышается точность измерения ускорения.
В зависимость от знака угла α грузы 12', 12" устанавливаются на второй основной поверхности 7 подвижной части 5 или на свободном торце компенсационной катушки 8, противоположном торцу, к которому прикреплены грузы 10', 10", 10'", 10iv.
При установке накладки 13 со слоем никеля 22 на внешнюю подвижную часть 5 действует момент относительно оси подвеса 20 - 20, компенсирующий момент от сторонних сил, таких как магнитное тяжение ферромагнитных включений в материале элементов, установленных на внешней подвижной части 5. Величина компенсирующего момента определяется степенью намагниченности слоя никеля 22 на накладке 13, обусловленной полями рассеяния постоянного магнита 9.
Так как величины сторонних сил сравнительно малы, то для их компенсации достаточен слой ферромагнитного материала толщиной до 0,3 мкм.
Выполняя слой никеля 22 калиброванной толщины, можно компенсировать моменты от сторонних сил определенной величины. В зависимости от знака момента сторонних сил накладка 13 устанавливается или на одной стороне с (n+1)-м грузом, или на диаметрально противоположной стороне второй основной поверхности 7 подвижной части 5 пластины 3.
Источники информации
1. Патент США №3498138, МКИ G 01 Р 15/08, НКИ 73-517. Акселерометр. 1970 г.
2. Патент РФ №2051542, МКИ G 01 P 15/08, 15/13. Компенсационный акселерометр. 1994 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2514151C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2545469C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2193209C1 |
| АКСЕЛЕРОМЕТР | 2012 |
|
RU2514150C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
Изобретение относится к области измерительной техники, а именно к информационным преобразователям линейных низкочастотных ускорений с компенсационным преобразованием. Компенсационный акселерометр содержит пластину монокристаллического кремния, имеющую внутреннюю неподвижную часть, соединенную с ней упругим подвесом, дифференциальный емкостный датчик положения, магнитоэлектрический силовой преобразователь с кольцевой компенсационной катушкой и дисковым постоянным магнитом с диаметральным направлением намагниченности, прикрепленные одними своими торцевыми поверхностями к расположенной напротив постоянного магнита первой основной поверхности внешней подвижной части пластины n (n=2, 3...) грузов, на другие торцевые поверхности которых установлена компенсационная катушка силового преобразователя, (n+1)-й груз, расположенный на второй основной поверхности внешней подвижной части пластины на радиусе, перпендикулярном оси подвеса, усилитель. На расположенной по другую сторону от оси подвеса по сравнению с (n+1)-м грузом стороне второй основной поверхности внешней подвижной части пластины или на свободном торце компенсационной катушки установлены k грузов из монокристаллического кремния. На второй основной поверхности внешней подвижной части пластины по одну сторону с (n+1)-м грузом или в диаметрально противоположном положении по сравнению с ним установлена, по крайней мере, одна накладка из монокристаллического кремния, на свободной торцевой поверхности которой выполнен слой ферромагнитного материала калиброванной толщины до 0,3 мкм. Массы вышеуказанных k грузов выполнены в соответствии с расчетным соотношением. Техническим результатом изобретения является повышение точности измерения ускорения. 1 з.п. ф-лы, 7 ил.
где mn+1 – масса (n+1)-го груза;
11 – расстояние центра масс (n+1)-го груза от оси подвеса в направлении, перпендикулярном первой и второй основным поверхностям внешней подвижной части пластины;
α – угол между реальной измерительной осью и номинальной измерительной осью акселерометра;
12 - расстояние центра масс каждого k грузов от оси подвеса в направлении, перпендикулярном первой и второй основным поверхностям внешней подвижной части пластины.
| RU 2051542 C1, 27.12.1995 | |||
| US 3498138 A, 03.03.1970 | |||
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| Окно с вентиляционным устройством | 2002 |
|
RU2222680C2 |

