Для контроля за работой насосной установки применяют устройства, состоящие из электрического датчика усилий и электронного прибора, служащего для наблюдения динамограмм.
Предлагаемое устройство имеет более простую конструкцию и надежнее в работе.
Это достигается благодаря применению в нем электрического датчика конечных положений штока и механизма развертки, состоящего из выпрямителя, электронного реле и интегрирующего звена, которое управляется поступающими внешними импульсами дважды за период изменения измеряемого усилия.
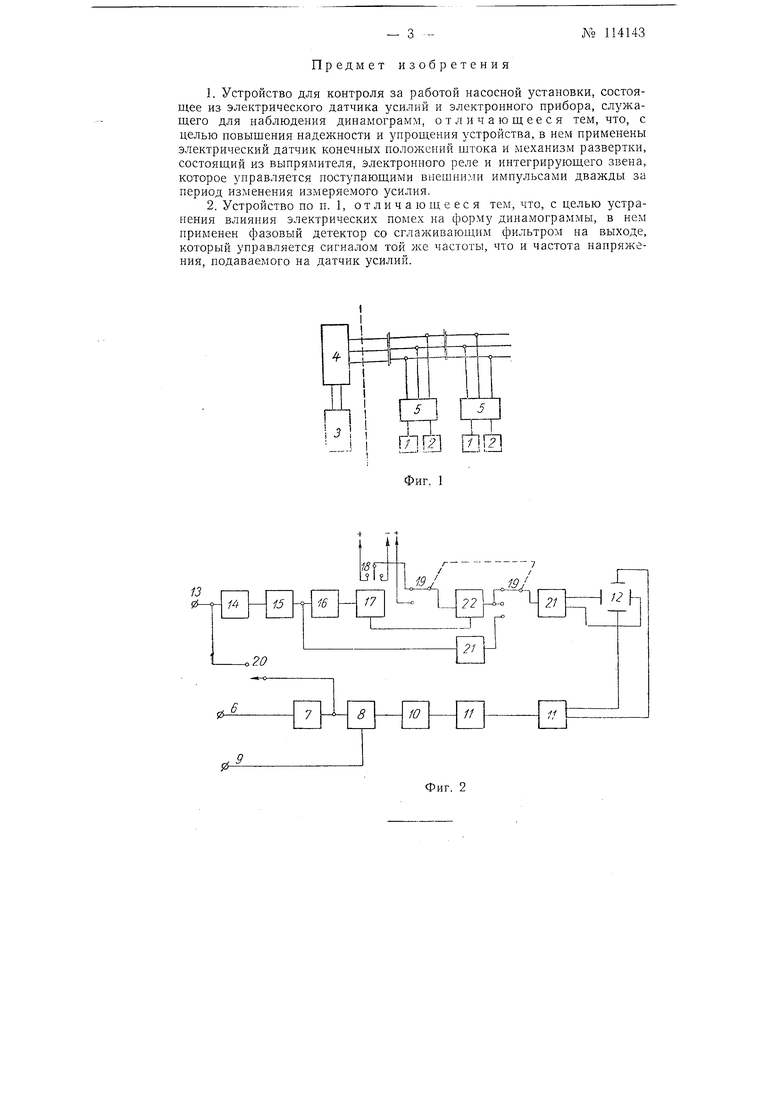
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг. 2 блок-схема динамоскопаУстройство состоит из электрических датчиков 1 и 2 для измерения усилий на щтоке и отметки крайних положений балансира и динамоскопа-электронного прибора 3, служащего для наблюдения динамограмм.
Оператор, находящийся на диспетчерском пункте, с помощью селективного пульта 4 поочередно подключает динамоскоп 3 к любой скважине.
В качестве датчика 1 усилий используется индивидуальный датчик по дифференциальной трансформаторной схеме с Н-образным средним магнитопроводом- Для передачи сигналов положений может быть использован любой из известных способов с контактными или бесконтактными датчиками 2.
На каждой скважине устанавливается также аппаратура выбора скважины Я.
С целью обеспечения достаточной стабильности и чувствительности, питание датчиков 7 и 2 производится с диспетчерского пункта стабильным напряжением повыщенной частоты.
М 114143- 2 -
Сигнал, поступающий с датчика усилий /, подается на вход 6 канала усилий динамоскопа. В этот канал включены катодный повторитель 7 для получения малого выходного сопротивления и фазовый детектор 8 со сглаживающим фильтром на выходе. Фазовый детектор 8 управляется сигналом, подаваемым по каналу связи 9 и имеющим ту же частоту, что и частота напряжения, подаваемого на датчик усилий. Применение фазового детектора 8 обеспечивает устранение влияния собственных и внешних помех ка форму кривых усилий (динамограмм).
На выходе фазового детектора включены аттенюатор 10, позволяющий изменять в широких пределах чувствительность канала усилий и два каскада усилителей 11 постоянного тока.
Выходные зажимы последнего усилителя // присоединяются к вертикальным отклоняющим пластинам электронно-лучевой трубки 12 с длительным послесвечением, па экране которой наблюдают изображение динамограмм.
Сигналы, поступающие от датчика 2 в .моменты начала хода балансира вверх или вниз, подаются па вход 13 канала пути, который обеспечивает работу механизма развертки электронно-лучевой трубки 12. Эти сигналы усиливаются усилителем 14 переменного тока и поступают к Быпрялгителю 15. После выпрямления и отфильтровывания переменной слагающей импульсы отрицательной полярности подаются на вход электронной лампы 16, находящейся в режиме сеточного ограниченияРабочая точка лампы 16 выбрана таким образом, что при отсутствии импзльсов сетка ее имеет некоторое положительное смещение. Поэтому прн появлении на сетке лампы 16 отрицательпых импульсов ее анодное напряжение скачкообразно возрастает. Напряжение, снимае.мое с выхода ла.мпы 16, дифференцируется активноемкостной цепочкой и подается на вход электронного реле 17 с двумя устойчивыми состояниями. Реле 17 построено на тиратронах и поэтому может срабатывать только при подаче на его вход положительных импульсов. При каледом положительном импульсе на входе реле /7, т. е. в начальные моменты поступления импу.гьсов с датчиков 2 на вход 13 канала пзти, это реле переходит из одного устойчивого состояния в другое. Напряжения па обоих анодах тиратронов при этом изменяются скачкообразно, и происходит переключение контакта 18.
В момент переключения контакта 18 при положении переключателей
19и 20, показанном на чертеже, на горизонтальные отклоняющие пластины электронно-лучевой трубки 12, включенные на выходе каскада усиления 21 постоянного тока, подается пилообразное напряжение. Это напряжение создается интегрирующим звеном 22, которое управляется поступающими внешними имп)льсами дважды за период наблюдаемого явления, соответственно в начале хода балансира вверх и вниз. При этом при поступлении второго импульса луч в электронно-лучевой трубке 12 изменяет свое панравление, перемещаясь в обоих направлениях с одинаковой скоростью.
Переключение переключателя 19 в среднее положение переводит интегрирующее звено 22 в режим релаксаций.
Интегрирующее звено 22 синхронизируется с импульсами, подаваемыми с анодной цепи тиратронов электронного реле 17. Синхронизация его может быть также осуществлена с помощью сигнала датчика / усилий при условии правильной установки нуля датчика, обеспечивающей переход сигнала через нулевое значение. В этом случае переключатель
20переводится в верхнее положение.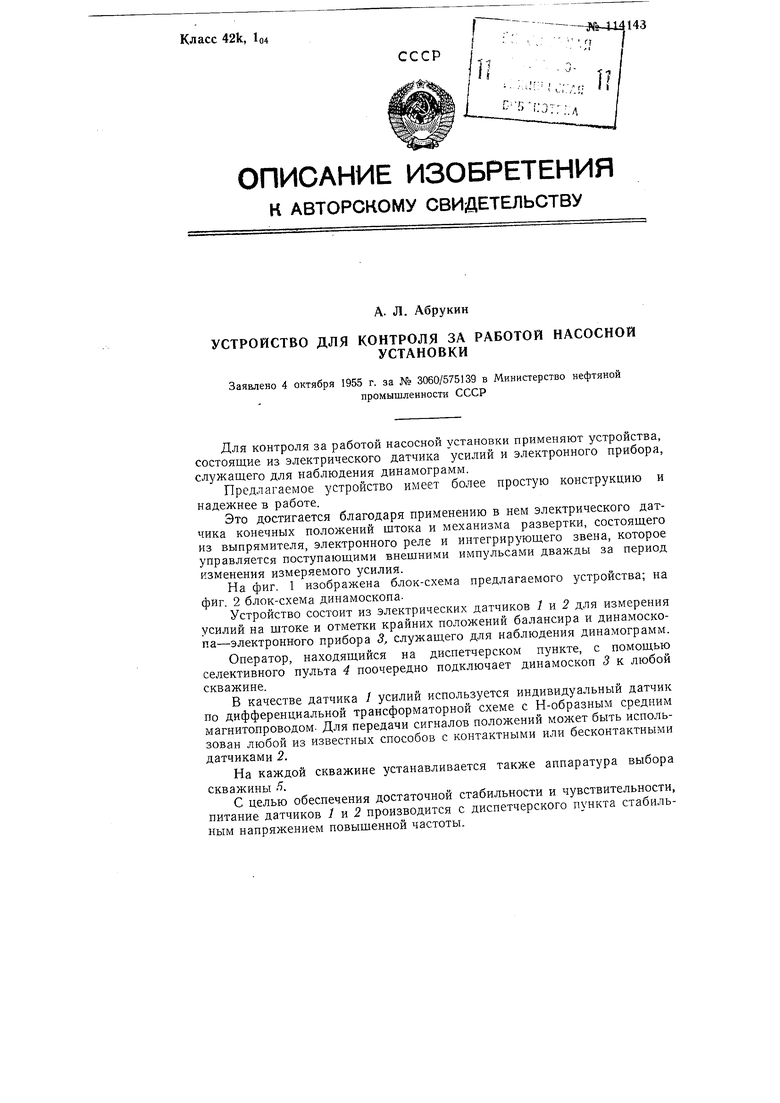
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для снятия амплитудно-фазовых характеристик при низких частотах | 1949 |
|
SU90566A1 |
| Устройство для телемеханического управления объектами | 1959 |
|
SU146341A1 |
| Электронное множительное звено | 1950 |
|
SU99639A1 |
| Малоканальная система телеуправления | 1954 |
|
SU124341A1 |
| Амплитудно-фазовый дискриминатор | 1948 |
|
SU78481A1 |
| Устройство развертки | 1987 |
|
SU1522423A1 |
| Балансировочное устройство | 1960 |
|
SU144627A1 |
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ ПОСЛЕДОВАТЕЛЬНЫХ ДВИГАТЕЛЬНЫХ РЕАКЦИЙ | 1969 |
|
SU249550A1 |
| Устройство для распознавания импульсных сигналов с внутриимпульсной модуляцией | 1988 |
|
SU1580569A2 |
| УСТРОЙСТВО для НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МАРКИ МАТЕРИАЛА ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ | 1969 |
|
SU251235A1 |