I
Изобретение относится к измерительной технике и может быть использовано для автоматического измерени отношения сигнал/шум фотоприемников (в частности, фотоприемников, применяемых для обнаружения различных объектов по их инфракрасному излучению) в процессе их приемо-сдаточных испытаний.
Известно устройство для измерени отношения сигнал/шум, содержащее полосовой фильтр, блок вьщеления сигнала из смеси сигнала с шумом, состоящий из сумматора, линии задерки и блока вычитания, детектор, интегратор, вычислитель отношения сигнал/шум и блок регистрации СОНедостаток этого устройства большая погрешность измерения отношения сигнал/шум при малых уровнях шумов и при малых уровнях сигналов.
Наиболее близким к предлагаемому является устройство для измерения отношения сигнал/шум, содержащее четыре сумматора, две линии задержки и детектор шума, выход которого соединен с входом вычислителя отношения сигнал/шум, выход которого является первым выходом устройства, блок вычитания, полосовой фильтр, коммутатор и детектор сигнала, первый вход которого соединен с вторым входом вычислителя отношения сигнал/шум, а второй выход является вторым выходом устройства, вход полосового фильтра является входом устройства, а выход соединен с входом первой линии задержки и первыми входами первого и второго сумматоров, выходы которых соединены с входами блока вычнт.ания, выход которого соединен с входом детектора сигнала, выход первой линии задержки соединен с вторыми входами первого и третьего сумматоров непосредственно и через вторую линию задержки - с вторым входом второго сумматора и первым входом третьего сумматора, выход которого непосредственно и через четвертый сумматор соединен с входом коммутатора, выход которого подключен к входу детектора шума, а второй вход четвертого сумматора соединен с выходом первого сумматора С ЗНедостатки этого устройства узкий динамический диапазон измеряемых отношений сигнал/шум и низкая
08
точность измерения малых и больших отношений сигнал/шум. Эти недостатки обусловлены тем, что отношение сигнал/шум в известном устройстве определяется как отношение постоянных составляющих сигнала и шума. При измерении отношения сигнал/шум входного процесса с малой сигнальной составляющей происходит искажение
измеряемого отношения детектором вследствие подавления сигнала собственными шумами детектора. Кроме того, на погрешность измерения влияют и собственные шумы остальных блоков устройства, включенных до детекторов. Если уровень этих шумов сравним с уровнем измеряемого шума, возникает значительная погрешность измерения больших значений отношения
сигнал/шум. Таким образом, известное устройство имеет недостаточную точность измерения отношения сигнал/шум как с малой сигнальной, так и с малой шумовой составляющей входной .
смеси. Точность устройства удовлетворительна только в узком динамическом диапазоне значений отношения сигнал/шум.
Цель изобретения - повьш1ение точности измерения и расширение динамического диапазона измеряемых отношений сигнал/шум.
Поставленная цель достигается
тем, что устройство для измерения
отношения сигнал/шум фотоприемников, содержащее источник излучения, блок выделения сигнала из смеси сигнала с шумом, последовательно соединенные полосовой фильтр и детектор, а также блок регистрации, введены последовательно соединенные управляемый аттенюатор и широкополосный усилитель, при этом вход управляемого аттенюатора является входом устройства, выход широкополосного усилителя соединен со входом полосового фильтра, выход детектора подключен к входу блока выделения
сигнала из смеси сигнала с шумом, первый выход которого подключен к блоку регистрации, второй выход к управляющему входу источника излучения, третий выход - к управляющему входу блока питания фотоприемника,четвертый выход - к управляющему входу управляемого аттенюатора.
31
Блок выделения сигнала из смеси сигнала с шумом содержит последовательно соединенные аналого-цифровой преобразователь и микропроцессор, при этом,вход блока подключен к входу аналого-цифрового преобразователя, первый, второй, третий и четвертый выходы микропроцессора подключены к соответствующим выходам блока выделения сигнала из смеси сигнала с шумом, а пятьй выход микропроцессора подключен к управляющему входу аналогоцифрового преобразователя.
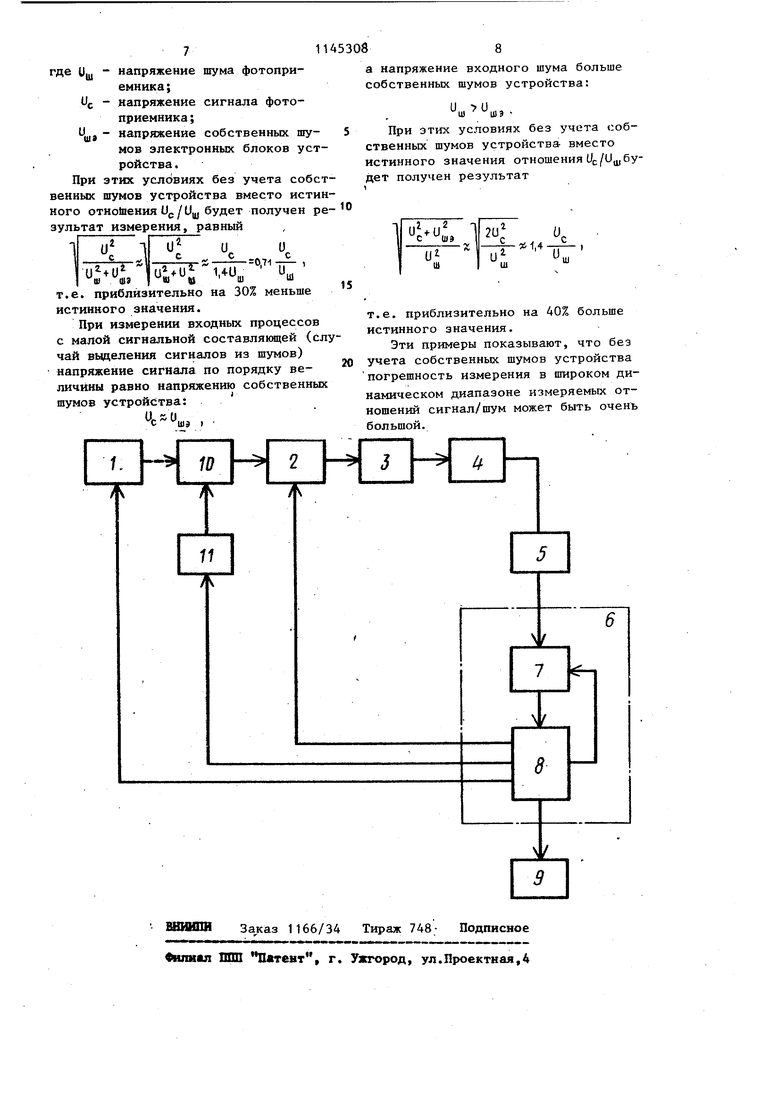
На чертеже изображена структурная схема устройства.
Устройство содержит источник 1 излучения, последовательно соединенные управляемьй аттенюатор 2, широкополосный.усилитель 3, полосовой фильтр 4, детектор 5, блок 6 выделения сигнала из смеси сигнала с шумом, состоящий из последовательно соединенных аналого-цифровых преобразователей 7 и микропроцессора 8, блок регистрации 9 и измеряемый фотоприемник 10 с блоком 11 питания фотоприемника.
Устройство работает следующим образом.
Выход измеряемого фотоприемника 10 подключают к входу аттенюатора 2
Цикл измерения отношения сигнал/ шум фотоприемника, состоящий из четырех тактов, организует микропроцессор 8, который работает по программе, хранящейся в его памяти.
В первом такте измеряется постоянная составляющая смеси сигнала с шумами фотоприемника 10 и собственными шумами устройства. Микропроцессор 8 нырабатьшает команды, которые с его третьего и четвертого выходов поступают соответственно на управляющие входы источника излучения 1 и блока 11 питания фотоприемника 10. При этом на фотоприемник 10 подается гармонически модулированное излучение от источника 1 и питание от блока 11.
С выхода фотоприемника 10 смесь сигнала с шумами подается на вход аттенюатора 2 и затем проходит через последовательно соединенные широкополосный усилитель 3, полосовой фильтр 4 и детектор 5. Широкополосный усилитель 3 усиливает напряжение на выходе аттенюатора 2. Полосо08 . 4
вой фильтр 4 выделяет необходимую шумовую полосу пропускания. Детектор 5 выделяет пЬстоянную составляющую входного процесса. С выхода детектора 5 напряжение подается на вход аналого-цифрового преобразователя 7, который преобразует это напряжение в цифровой код.
С выхода аналого-цифрового преобразователя 7 цифровой код поступает в оперативную память микропроцессора 8. Запуск аналого-цифрового преобразователя 7 осуществляется подачей команды на его управляющий
вход с первого выхода микропроцессора 8. При измерении осуществляется многократный запуск аналого-цифрового преобразователя 7 с последующим усреднением микропроцессором
8 цифровых кодов, полученных при каждом запуске.
Команды, подаваемые с второго выхода микропроцессора 8 на управляющий вход аттенюатора 2, устанавливают коэффициент передачи последнего. Первоначально ослабление aiTeI
нюатора 2 микропроцессор 8 устанавливают максимальным. Выбор значения коэффициента передачи аттенюатора 2
осуществляется микропроцессором 8 таким образом, чтобы цифровой код на выходе аналого-цифрового преобразователя 7 находился в заранее установленных пределах, значения которых хранятся в памяти .микропроцессора 8. Постоянная составляющая напряжения входного процесса определяется микропроцессором 8 путем деления полученного цифрового кода
на выбранный коэффициент передачи аттенюатора 2.
Во втором такте устройство измеряет постоянную составляющую напряжения смеси шумов фотоприемника 10
и собственных шумов. По команде микропроцессора 8, поступающей с его третьего выхода, непроницаемая заслонка источника 1 излучения перекрывает излучение и оно не попадает на фотоприемник 10. Далее осуществляются такие же измерительные преобразования, как в первом такте. В третьем такте устройство измеряет постоянную составляющую напряжения собственных щумов. По команде микропроцессора 8, поступающей с его четвертого выхода, отключается .питание фотоприемника 10. Далее осуществляются такие же измеритель ные преобразования, как в первом такте. В четвертом такте блок 6 выделе ния сигнала из смеси сигнала с шум по измеренным в первом, втором и третьем тактах постоянньтн состав ляющим напряжений на выходе детектора 5 определяет значения напряже ний сигнала и шума фотоприемника 10 и вычисляет их отнсмшение. Для этого первоначально микропроцессор 8 определяет дисперсию смеси шумов фотоприемника 10 и собственных шумов устройства из следующего выражения : 4 V (1 где 6 - дисперсия смеси шумов фотоприемника 10 и устройства;Vj - постоянная составляияцая напряжения смеси шумов фотоприемника 10 и устройства, измеренная во втором такте. При вычислении по формуле (1) закон расйределения шума предполаг ется нормальным. I Затемосуществляется коррекция искажения отношения сигнал/шум при -прохождении входного процесса через детектор 5. Для этого из выражения (в случае применения линей ного детектора) где V - постоянная составляющая напряжения смеси сигнала шумом фотоприемника 10 и собственным шумом устройс ва, измеренная в первом такте; Ij функции Бесселя нулевого порядка; Е - напряжение смеси сигнала шумами на входе детектора 1 - функция Бесселя первого порядка, микропроцессор 8 определяет напряжение Б. Далее микропроцессор 8 определя ет дисперсию собственных шумов уст ройства из следующего выражения: 2 2U, 1-- (5) . 8 где 6 - дисперсия собственных шумов устройства; Vj - постоянная составляющая , напряжения собственных шумов устройства, измеренная в третьем такте. Если устройство используется для измерения отношения сигнал/шум с законом распределения шума, отличным от нормального, а также при использовании в составе устройства квадратичного детектора, необходимо изменить расчетные выражения (1) (3), что обеспечивается путем смены программы обработки измерительной информации, хранимой в памяти микропроцессора 8. Микропроцессор 8 определяет отношение сигнал/шум фотоприемника 10 из следующего выражения: и- - 0, измеряемое устройством отношение сигнал/шум фотоприемника ; U2 262 средний квадрат напряжения смеси шумов фотоприемника 10 и собственных шумов устройства; средний квадрат напряжения собственных шумов устройства. Измеренное отношение сигнал/шум пятого выхода микропроцессора 8 подается на вход блока 10 регистрации. В полученном результате измере отношения сигнал/шум исключено влияние подавления сигнала собственными шумами детектора, а также влияние собственных шумов других блоков устройства. Оценим количественно достижимый положительньй эффект. - При измерении входных процессов с малой шумовой составляющей, когда входной шум измеряемого фотоприемника Ьравним по порядку величины с собственным шумом устройства, а измеряемое отношение сигнал/шум велико, выполняются следующие соотношения:
где Ощ напряжение шума фотоприемника ;
U(; - напряжение сигнала фотоприемника ;
Ujyj - напряжение собственных шунов электронных блоков устройства .
При этих условиях без учета собственных шумов устройства вместо истинного отношения , будет получен результат измерения, равный
:
uTuF
и.
щэ I ш и Ш т.е. приблизительно на 30% меньше истинного значения.
При измерении входных процессов с малой сигнальной составлякнцей (слчай выделения сигналов из шумов) напряжение сигнала по порядку величины равно напряжению собственных шумов устройства: Up и
шз )
1,
W
а напряжение входного шума больше собственных шумов устройства:
и шэПри этих условиях без учета собственных шумов устройства вместо истинного значения отношения Uc/Uu, будет получен результат
Mi
(,4 и
Ш
Т.е. приблизительно на 40% больше истинного значения.
Эти примеры показывают, что без учета собственных шумов устройства погрешность измерения в широком динамическом диапазоне измеряемых отношений сигнал/шум может быть очень большой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического измерения шумов | 1982 |
|
SU1064235A1 |
| Устройство для измерения шумовой температуры радиоприемного комплекса | 1986 |
|
SU1406536A1 |
| Сверхвысокочастотный радиометр | 1989 |
|
SU1686388A1 |
| Лазерный фазовый дальномер | 2015 |
|
RU2610514C2 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| Устройство для оценки разборчивости речи по каналу связи | 1991 |
|
SU1809545A1 |
| НУЛЕВОЙ РАДИОМЕТР | 2003 |
|
RU2235340C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2256937C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 1992 |
|
RU2042195C1 |
| РАДИОМЕТР | 2002 |
|
RU2211455C1 |
1. УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ ФОТОПРИЕМНИКОВ, содержащее источник излучения, блок вьщеления сигнала из смеси сигнала с шумом, последовательно соединенные полосовой фильтр и детектор, а также блок регистрации, о т л и чающееся тем, что, с целью повышения .точности измерения и расширения динамического.диапазона измеряемых отношений сигнал/шум, в него введены последовательно соединенные управляемый аттенюатор и широкополосный усилитель, при этом вход управляемого аттенюатора является входом устройства, выход широкополосиого усилителя соединен с выходом полосового фильтра, выход детектора подключен к входу блока выделения сигнала из смеси сигнала с шумом, первый выход которого подключен к блоку регистрации, второй выход к управляющему входу источника излучения, третий выход - к управляющему входу блока питания фотоприемника, четвертый выход - к управляющему входу управляемого аттенюатора, 2. Устройство по П.1, о т л и чающееся тем, что блок вь|деления сигнала из смеси сигнала с шумом содержит последовательно соединенные аналого-цифровой преобразователь и микропроцессорJ этом . (/) вход блока подключен к входу анало го-цифрового преобразователя, первый, второй, третий и четвертый выходы микропроцессора подключены к соответствующим выходам выделения сигнала из снеси сигнала с шумом, а пятый выход микропроцес сора подключен к управляюв му входу сл аналого-цифрового преобразователя. :о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения отношения"СигНАл-шуМ | 1979 |
|
SU808996A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения отношения сигнал/шум | 1980 |
|
SU883803A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
