Известные способы динамической компенсации переменных электрических величин имеют существенный недостаток, заключающийся в том, что при измерении время-переменных величин не обеспечивается требуемая точность компенсации из-за невысокой частоты опроса. Если частоту опроса повысить до максимальной, то это приведет к более быстрому износу движущихся деталей устройства и повышению погрещностей.
Описываемый способ позволяет устранить этот недостаток, для чего динамическую компенсацию осуществляют самонастраивающейсяЧастота опроса (частота динамической компенсации) автоматически согласуется со скоростью изменения измеряемых величин. Наиболее быстрому изменению измеряемой величины соответствует наибольшая частота опроса. С уменьшением скорости изменения измеряемой величины уменьшается соответственно и частота опроса. Скорость изменения входной величины характеризуется соответствующим изменением ее производной или высшей гармоники.
Частота динамической компенсации автоматически непрерывно изменяется, соответственно производной или высщей гармоники входного электрического сигнала.
На фиг. 1 показан график процесса изменения частоты опроса с изменением скорости входной величины x(t), где: S(t)-пилообразное напряжение опроса; i(t)--выходные время-импульсные сигналы, t-ось времени.
На фиг. 2 показана функциональная блок-схема динамической компенсации.
Входной сигнал х (t) циклически уравновешивается напряжением пилообразной формы S(t). Нуль-орган Я отмечает импульсным способом моменты равновесия (x(t)-5(/)0). От источника входного сигнала X (t) снимается сигнал а (/), который через блок управления У воздействует как сигнал управления У (t) на генератор развертки напря№ 114706
жения S(t) для изменения частоты развертки, соответственно частоте входного сигнала.
Способ самонастраивающейся динамической компенсации применяется в нескольких вариантах. Одна из разновидностей способа заключается в том, что частота динамической компенсации меняется не вследствие изменения длительности опрашивающих импульсов, а ввиду изменения частоты их следования. При этом их длительность остается постоянной.
На фиг. 3 показан график работы такой системы. Генератор развертки S(t) создает напряжение пилообразной формы постоянной частоты, а выключающее устройство выбирает отдельные циклы компенсации, соответственно скорости изменения входного сигнала x{t).
Для осуществления предложенного способа можно также использовать несколько стабильных частот пилообразного напряжения.
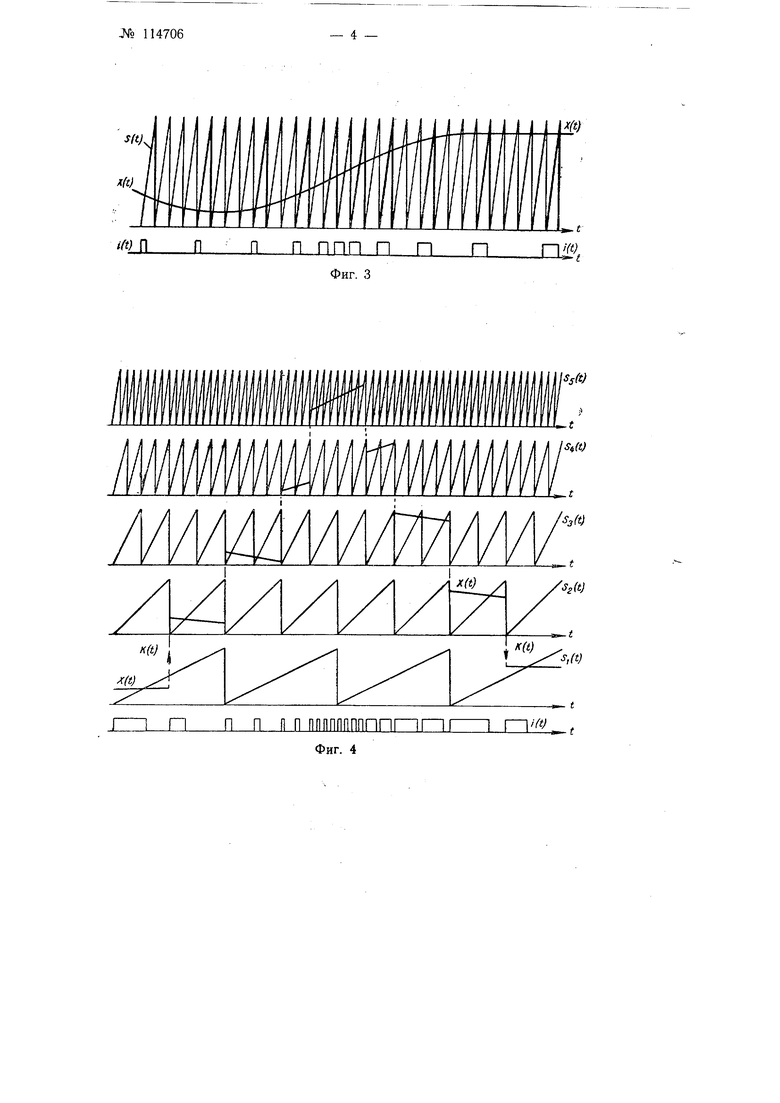
Работа такой системы показана на графике фиг. 4; функциональная блок-с.хема - на фиг. 5.
Согласно фиг. 4, отдельные участки входного сигнала x(t) различной крутизны отрабатываются пилообразными сигналами различной частоты..
Каждая из частот от генераторов развертки: Si (t), S (i), 83 (t), ), S5(t) подключает.ся на сравнивающее устройство Н (нуль-орган) тогда, когда частотная характеристика входного сигнала отвечает этой частоте- Эти переключения осуществляются ключами Сь /(2. Кз, К-, Ks (фиг. 5) с помощью сигнала функции включения /С(О- При этом удобно пользоваться удвоителями или делителями частоты с синхронизацией всего комплекта генераторов и управляющего устройства У при помощи Связей С (/) и С.
Нуль-орган Я отмечает моменты равновесия входного сигнала x(t)
и сигнала соответствующего генератора 5к (t), т. е. когда х (t)-5/.. (t) 0.
Изобретение позволяет осуществить также измерение нескольких
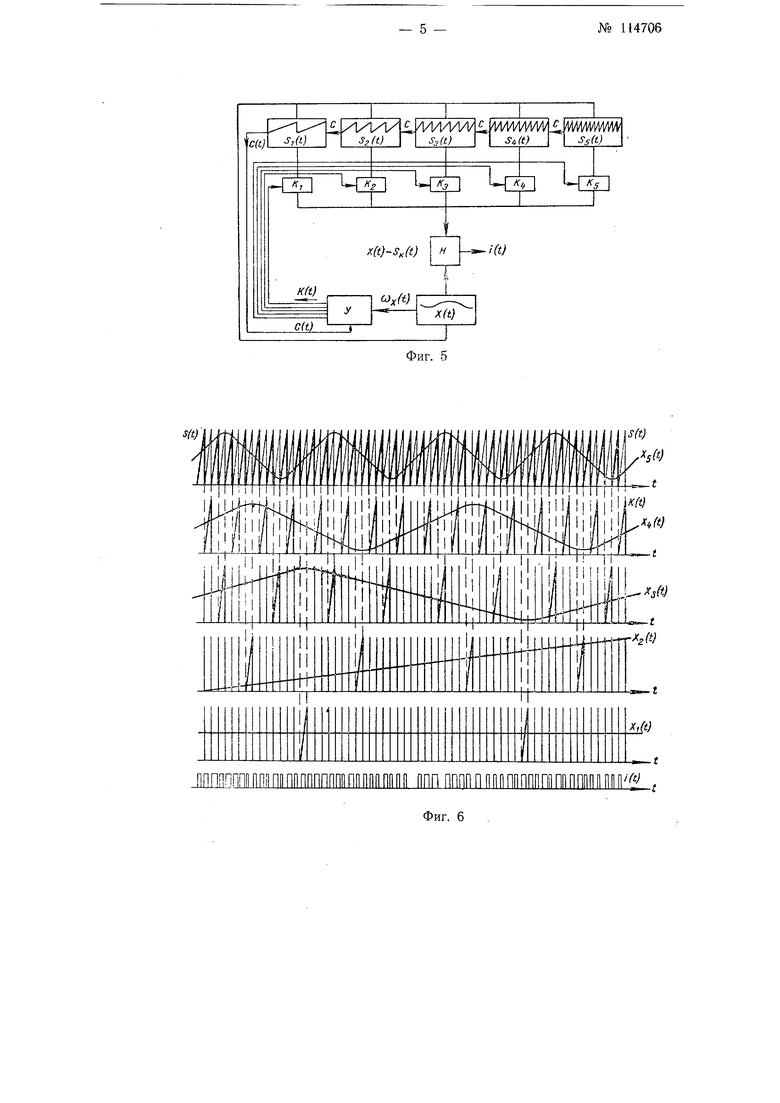
входных сигналов. Режим работы этой системы поясняется графиком
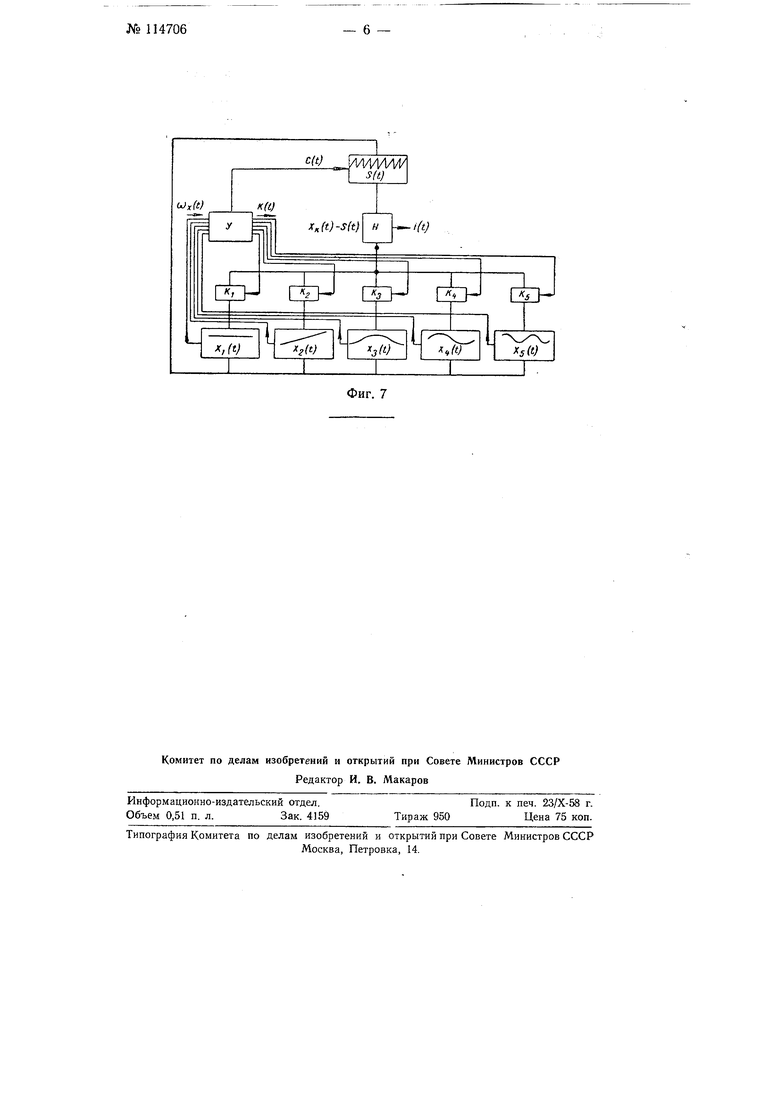
фиг. 6, функциональная блок-схема показана на фиг. 7При нескольких входных сигналах применяется генератор развертки стабильной частоты S(t), который подключается для сравнения к каждому из источников входных сигналов: X(t), X2(t), Xz(t), X4(t) X5{t) с чатотой соответствующей высщим гармоникам или производным этих сигналов.
На фиг. 7 К, К2 Кз, - выключающие устройства, обеспечи.вающие указанный режим работы, х (t)-S (t -разница между некоторым входным сигналом и сигналом от генератора пилообразного напряжения.
Пред мет из обретен и я
1. Способ самонастраивающейся динамической компенсации, отличающийся тем, что, с целью повыщения точности преобразования быстро меняющихся величин, частоту динамической компенсации автоматически непрерывно изменяют соответственно производной или высщей гармонике входного сигнала.
2.Прием выполнения способа по п. 1, отличающийся тем, что, с целью уменьшения частоты динамической компенсации, длительность опрашивающих импульсов берут постоянной и изменяют частоту их следования3.Прием выполнения способа по п. 1, отличающийся тем, что, с целью преобразования входных сигналов, используют несколько различных стабильных частот, каждую из которых автоматически подают к соответствующей цепи входного сигнала.
4.Прием выполнения способа по п. 1, отличающийся тем, что, с целью изменения частоты динамической компенсации, применяют генератор наивысшей стабильной частоты развертки я изменяют периодичность следования импульсов развертки, соответственно изменению частотной характеристики входного сигнала путем избирательного включения генератора развертки или цепи выходных импульсных сигналов.
5.Прием выполнения способа по п. 1, отличающийся тем, что, с целью преобразования нескольких входных сигналов, применяют генератор развертки стабильной частоты, который автоматически подсоединяется к источникам входных сигналов с частотой, соответствующей производным или высшим гармоникам этих сигналов.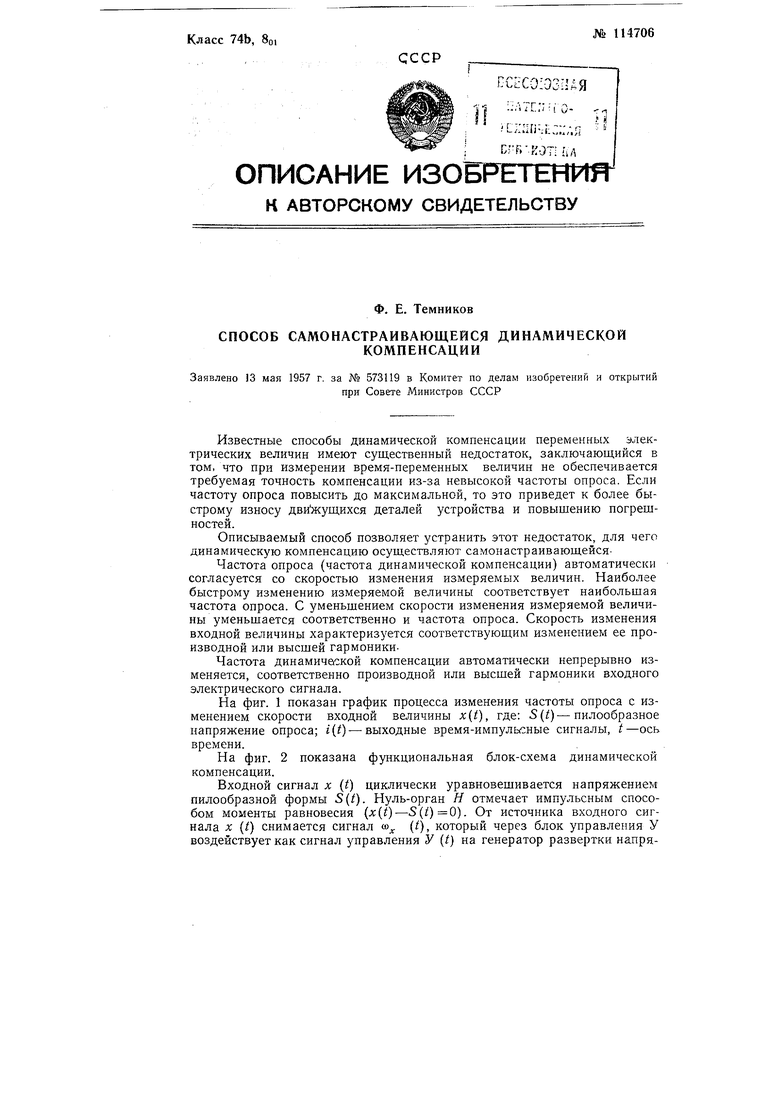


3(1)
x(t)
sit)
i(t)
((t}-s(t)
пд
Фиг. 4
Фиг. 5
