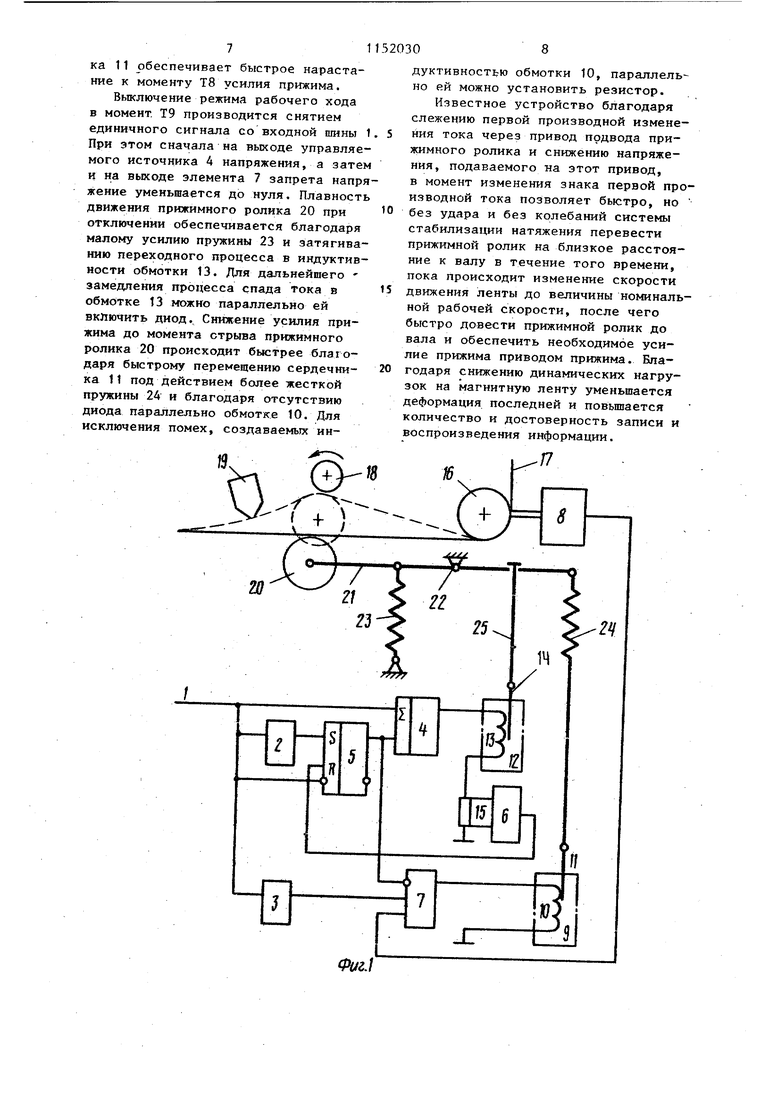
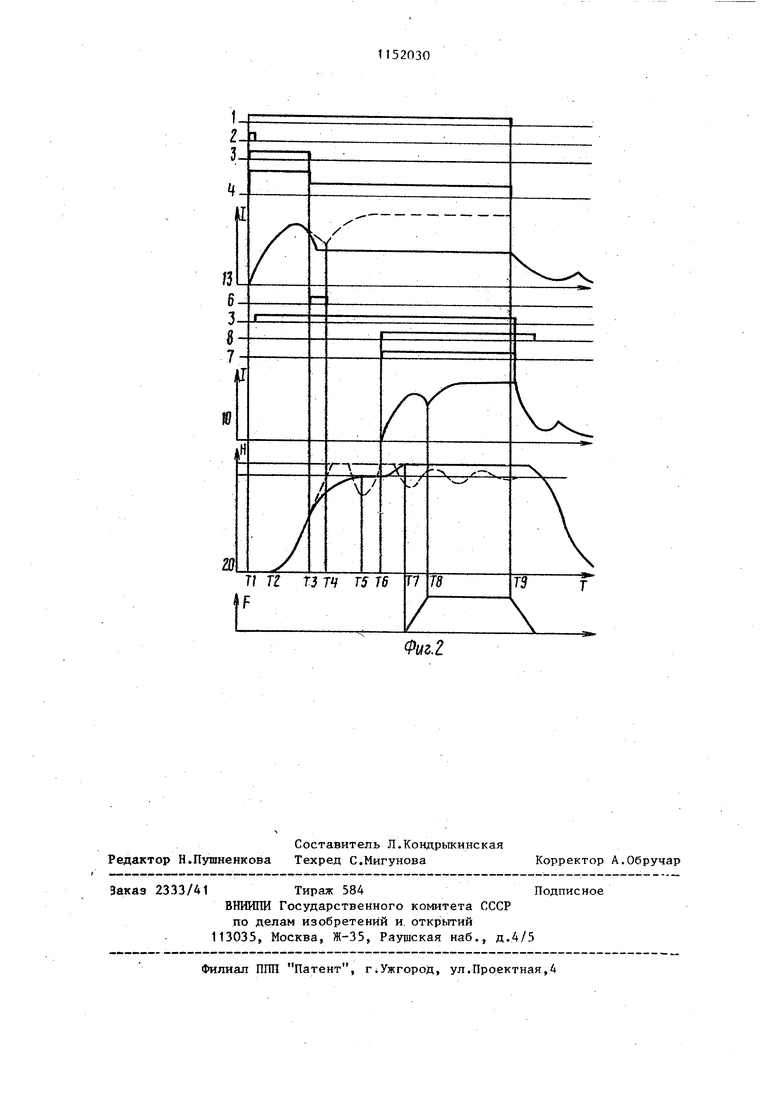
Изобретение относится к приборостроению и может быть использовано в механизмах транспортирования лент аппаратов магнитной записи работающих с повьшенной точностью движения магнитной ленты. Известно устройство для прижима ленты к валу, содержащее датчик ско рости, блок контроля скорости движе ния магнитной ленты, задатчик режим исполнительный механизм прихчма при жимного ролика вьтолнен в виде лине ного двигателя, а также усилитель, сумматор, интегратор, схему совпаде .HHHjABa аналоговых ктяоча и два источ ника опорных напряжений ОЗНедостатком этого устройства явл ется сложность, исполнительного меха низма, выполненного в виде линейног двигателяj перемещающего прижимной ролик на расстояние, пропорциональное йоданному напряжению. Для обеспечения высокой скорости включения режима необходимо точное позиционирование прижимного ролика на очен малом расстоянии от тонвала, что дополнительно усложняет исполнитель ный механизм.; Наиболее близким к изобретению по технической С5ЧЦНОСТИ является устройстйо для управления прижимом магнитной ленты к ведущему валу, содержащее исполнительный механизм прижима, триггер, задатчик режима и блок контроля скорости движения ленты, включакяций датчик скорости, генератор опорной частоты, управляемый делитель частоты, инвертор, два триггера, две схемы И-НЕ, счетчик, коммутатор, три дешифратора. Блок контроля скорости движения ленты в этом устройстве позволяет в режиме рабочего хода запустить триггер, управляющий приводом прижимного ролика, при достижении магнитной лентой скорости, близкой К номинальной скорости. Благодаря этому снижаются динамические нагруз ки на леяту. Привод прижимного ролика может быть простейшим, например в виде электромагнитаС2. Недостатком известного устройств является то, что прижимной ролик начинает двигаться только при уста новлении но шнапьной скорости движе ния ленты и поэтому проходит большой путь, .что требует большой скорости движения прижимного ролика. При этом возникают переходные процессы, раскачивание системы стабили зации натяжения ленты, что ведет к затягиванию времени включения режима рабочего хода и созданию динамических нагрузок на магнитную ленту. Это не позволяет использовать известное устройство для управления прижимом в точных аппаратах, работающих в старт-стопном реуиме с частыми остановками и перемотками, особенно, если потеря информации недопустима . Целью изобретения является уменьшение времени переходных процессов при прижиме И снижение динамических нагрузок на магнитную ленту. Поставленная цель достигается тем, что в устройство для управления прижимом магнитной ленты к ведущему валу, содержащее датчик скорости магнитной ленты, триггер, шину управления и исполнительный механизм прижима, введены одновибратор, управляемый источник напряжения, дифференциатор тока элемент задержки и элемент запрета, а исполнительный механизм прижима выполнен в виде двух электромагнитов, тяги которых сопряжены с рычагом прижимного ролика, при этом пшна управления подключена через последовательно соединенные элемент задержки и элемент запрета к обмотке первого электромагнита и через последовательно соединенные одновибратор, триггер, управляе№,1й источник напряжения, обмотку второго электромагнита и дифференциатор тока к прямому установочному входу триггера, инверсньй установочный вход которого связан с вторым входом управляемого источника напряжения с шиной управления, а выход датчика скорости магнитной ленты соединен с вторым входом элемента запрета, инверсный вход которого подключен к выходу триггера. На фиг. 1 показана функциональная схема устройства для управления прижимом ленты; на фиг. 2 - временная диаграмма его работы, совмещенная с графиками изменения токов I электромагнитов перемещения Н прижимного ролика, и усилия F прш.има. К шине 1 управления, предназначенной для подачи сигнала включения режима рабочего хода (Запись или Воспроизведение) от устройства управления режимами работы (не показано) , подключены входы одновибратоpa 2, элемента 3 задержки и один из входов управляемого источника 4 напр жения, а также инверсный вход устано ки триггера 5 в нулевое состояние. Прямой вход установки триггера 5 в единичное состояние подключен к выхо ду одновибратора 2, прямой вход уста новки в нулевое состояние - к выходу дифференциатора 6, а прямой выход к другому входу управляемого источника 4 напряжения и к инверсному входу элемента 7 запрета, один из прямых входов которой подключен к выходу элемента 3 задержки, другой прямой вход - к выходу датчика 8 скорости магнитной ленты,- а выход связан с вторым электромагнитом 9, с обмоткой to и с сердечником 11. Управляемый источник 4 напряжения имеет два равноценных входа, а его вькодное напряжение пропорционально сумме входных сигналов (источник представляет из себя сумматор с мощным выходом, при этом выходное напря жение без нагрузки пропорционально сумме входных сигналов). К выходу управляемого источника 4 напряжения подключен второй электромагнит 12, вьшолненный с обмоткой 13 и сердечни ком 14. и цепь его обмотки 13 может быть включен шунт 15, измерительные .клеммы которого подключены к входам дифференциатора 6, образующего вместе с шунтом 15 схему дифференциатора тока. Датчик 8 скорости движения ленты может представлять собой логическую схему двухпорогового частотного дискриминатора с частотно-импульсным датчиком угла поворота мерного обвод ного ролика 16, сопряженного с магнитной лентой 17. Генератором скорости в режиме рабочего хода является ведущий вал 18. Ппя подвода и приАима ленты Т7 к валу 18 и срзДани угла обхвата головок (на схеме услов но показана одна воспроизводящая головка 19) служит обрезиненньй прижим ной ролик 20, установленный с возмож ностью свободного вращения на оси, укрепленной на рычаге 21, установлен ном с возможностью поворота на неподвижной оси 22. Для отвода прижимного ролика 20 от вала 18 и от ленты 17 служит пружина 23. Рычаг 21 через 24, служащую для создания необходимого усилия прижима, связан с сердечником 11 первого привода 9. 304 Тяга 25 служит для подвода прижимного ролика 20 на близкое расстояние к валу 18 (это положение ролика 20 и соответствующий изгиб ленты 17 по казаны на схеме штриховой линией). Тяга 25 связана с сердечником 14 второго привода 12, который установлен таким образом, чтобы при его срабатывании прижимной ролик 20 по дошел на близкое расстояние к валу 18, а при опускании прижимной роли1с вернулся в исходное состояние, обеспечивая прямой тракт ленты 17 Привод 9 установлен таким образом, чтобы при срабатывании привода 12 сердечник 11 вошел в катушку 10 на расстояние, обеспечивающее надежное срабатывание электромагнита 9. Таким образом, электромагнит 12 служит для подвода прижимного ролика 20 на близкое расстояние к валу 18, а электромагнит 9 - для прижима и создания необходимого усилия прижима. (Для регулировки усилия прижима пружина 24 вьшолняется регулируемой). Устройство работает следующим образом. В исходном состоянии по шине 1 поступает сигнал, соответствующий логическому нулю (при соглашении положительной логики это потенциал низкого уровня) и свидетельствующий о работе аппарата в режиме перемоток или останова, поэтому триггер 5 находится также в нулевом состоянии. Поскольку на обоих входах управляемого источника 4 напряжения нулевые сигналы, то нулевой сигнал и на его выходе, поэтому обмотка 13 подвода обеспечена. Благодаря нулевому потенциалу на прямом входе элемента 7 запрета, связанном с выходом элемента 3 задержки, обесточена также и обмотка 10 прижима. Под воздействием пружинь 23 прижимной ролик 20 отведен от вала 18 и ленты 17, которая образует прямой тракт между правым обводньо4 роликом 16 и левым обводным роликом или поДаю11р1м узлом (не показаны) и не касается блока головок, чем обеспечиваются наилучшие условия ля перемотки и заправки ленты. При включении режима рабочего хоа аппарата в момент времени TI боковые узлы начинают разгон ленты 17, а сигнал на шине 1 принимает значение логической единицы (потенциал высокого уровня при соглашении поло- жительной логики). При этом короткий импульс, вырабатываемьй одновибратором 2, устанавливает в единичное состояние триггер 5, который запрещает прохождение сигналов через элемент 7 запрета и подает единичньш сигнал на другой вход управляемого источника 4 напряжения, на первый вход которого поступает также единичный потенциал с шины 1, поэтому напряжение на его выходе принимает максимальное значение и ток через обмотку 13 начинает возрастать по экспоненциальному закону, однако сер дечник 14 пока еще не движется. Элемент 3 задержки исключает появление единичного сигнала на выходе обмотки 10 прижима во время переходных процессов в одновибраторе 2 и триггере 5, если включение режима рабочего хода происходит при движении ленты 17 со скоростью, равной номинальной рабочей скорости (например, из режима регулируемой плавной пере мотки или после кратковременного включения другого режима, когда ско рость переходит через значение номи нальной рабочей скорости). В момен Т2, когда усилие, создаваемое электромагнитом 12 подвода, превысит силы трения к кинематике и начально усилие пружины 23, сердечник 14 начинает перемещать прижимной ролик 2 При изменении положения сердечника 14 изменяется индуктивность обмотки 13, в результате чего ток через нее начнет кратковременно снижаться. Если бы напряжение, подаваемое на обмотку 13, не изменялось, то тяга 25, продолжая ускоренно двигаться, в момент Т4 достигал бы конечного положения, прижимной ролик 20 занял бы положение, близкое к валу 18, -совершив несколько колебательных дв жений, при этом ток обмотки 13 снов возрос бы. (Этот процесс отображен на графиках штриховой линией). Уско ренное движение сердечника 14 и уда его в конечном положении, сопровожд ющийся колебательным процессом, вызывали бы динамические нагрузки на магнитную ленту и раскачивание системы стабилизации натяжения. Попытка задемпфировать рычаг 21 прижимн.ого ролика 20 ведет к значительному снижению быстродействия, особенно при отключении режима рабочего хода, и к необходимости повышения усилия возвратной пружины 23, а это, в свою очередь, вызывает необходимость увеличивать моп(ность электромагнита 12 и повышает потребляемую мощность. На графике Н f (Т) показана наиболее оптимальная характеристика движения прижимного ролика 20 от j момента Т2 трогания до момента Т5 выхода в положение, близкое к валу 18. Такое движение ролика 20 при высоком быстродействии не создает динамических нагрузок на ленту и не сопровождается колебательными процессами. Для обеспечения подобной характеристики движения прижимного ролика служит дифференциатор тока, включающий шунт 15 и дифференциатор 6. Когда после начала движения сердечника 14 ток через обмотку 13 уменьшается, дифференциатор 6 в момент ТЗ вьфабатывает сигнал, устанавливающий триггер 5 в нулевое состояние. В результате напряжения с выхода управляемого источника 4 уменьшается в два раза, движение сердечника 14 и прижимного ролика 20 замедляется, а ток обмотки 13 уменьшается до тока удержания. При этом прижимной ролик 20 плавно подходит к положению, близкому к валу 18, не касаясь последнего, и остается .в этом положении до достижения лентой 17 номинальной скорости движения . Одновременно с подводом прижимного ролика 20 сердечник 11 входит в обмотку 10 электромагнита 9 окончательного прижима. При сбросе в момент ТЗ триггера 5 одновременно с уменьшением напряжения с выхода источника 4 снимается запрещающий потенциал с инверсного входа элемента 7 запрета, поэтому при достижении лентой 17 номинальной скорости сигнал логической единицы с выхода датчика 8 скорости движения ленты вызьгеает появле ше в момент Т6 сигнала высокого уровня на выходе элемента 7 запрета, в результате чего возникает ток через обмотку 10. Благодаря тому, что прижимной ролик 20 расположен на малом расстоянии от вала 18, он проходит расстояние до прижима плавно при малой начальной скорости движения сердечника 11 и за малое время к моменту Т7. Дальнейшее ускорение движения сердечни7ка 11 обеспечивает быстрое нарастание к моменту Т8 усилия прижима. Выключение режима рабочего хода в момент. Т9 производится снятием единичного сигнала со входной шины При этом сначала на выходе управляе мого источника 4 напряжения, а зате и на выходе элемента 7 запрета напр жение уменьшается до нуля. Плавност движения прижимного ролика 20 при отключении обеспечивается благодаря малому усилию пружины 23 и затягива нию переходного процесса в индуктив ности обмотки 13. Для дальнейшего замедления процесса спада тока в обмотке 13 можно параллельно ей включить диод. Снижение усилия прижима до момента отрыва прижимного ролика 20 происходит быстрее благодаря быстрому перемещению сердечника 11 под действием более жесткой пружины 24 и благодаря отсутствию диода параллельно обмотке 10. Для исключения помех, создаваемых ин08дуктивностью обмотки 10, параллель но ей можно установить резистор. Известное устройство благодаря слежению первой производной изменения тока через привод подвода при5КИМНОГО ролика и снижению напряжения, подаваемого на этот привод, в момент изменения знака первой производной тока позволяет бьгстро, но без удара и без колебаний системы стабилизации натяжения перевести прижимной ролик на близкое расстояние к валу в течение того времени, пока происходит изменение скорости движения ленты до величины номинальной рабочей скорости, после чего быстро довести прижимной ролик до вала и обеспечить необходимое усилие прижима приводом прижима. Епагодаря снижению динамических нагрузок на магнитную ленту уменьшается деформация последней и повьшается количество и достоверность записи и воспроизведения информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления магнитофоном | 1986 |
|
SU1332372A1 |
| Устройство для управления электромагнитом | 1988 |
|
SU1511772A1 |
| Устройство для управления электромагнитом | 1987 |
|
SU1432620A1 |
| Устройство для управления электромагнитом | 1989 |
|
SU1665413A1 |
| Устройство магнитной записи | 1983 |
|
SU1078466A1 |
| Устройство для перемещения магнитной ленты | 1984 |
|
SU1229814A1 |
| Устройство для испытания электроагрегатов | 1990 |
|
SU1721589A1 |
| Устройство для управления лентоприжимом аппарата магнитной записи | 1983 |
|
SU1086456A1 |
| Устройство для управления электромагнитом | 1990 |
|
SU1709402A1 |
| Аппарат магнитной записи | 1982 |
|
SU1064312A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИЖИМОМ МАГНИТНОЙ ЛЕНТЫ К ВЕДУ1ЦЕМУ ВАЛУ, содержащее датчик скорости магнитной ленты, триггер, шину управления и исполнительный механизм прижима, отличающееся TeMj что, с целью уменьшения времени переходных процессов при прижиме и снижения динамических нагрузок на магнитную ленту, в него введены одновибратор, управляемый источник напряжения, дифференциатор тока, элемент задержки и элемент запрета, а исполнительный механизм прижима вьтолнен в виде двух электромагнитов, тяги которых сопряжены с рычагом прижимного ролика, при этом шина управления подключена через последовательно соединенные элемент задержки и элемент запрета к обмотке первого электромагнита и через последовательно соединенные одновибратор, триггер, управляемый источник напряжения, обмотку второго электромагнита и дифференциатор тока - к прямому установочному входу триггера, инверсный установочный вход которого связан с вторым входом управляемого источника напряжения и с шиной управления, О) а выход датчика скорости магнитной ленты соединен с вторым входом элемента запрета, инверсный вход которого подключен к выходу триггера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
